
Abstract
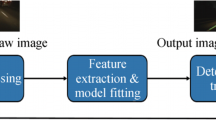
In today’s world the self driving car industry is booming and is expected to reach a global revenue of 175 billion dollars by the end of 2025. The self driving car employs various combinations of sensors to navigate the car autonomously. The cars in present times are equipped with driver assistance features like positioning the car within the particular lane. This requires a proper lane detection technique which is robust to errors and gives an accurate output. There are several algorithms being used currently in the industry for detecting the lanes so as to direct the driverless-car not to deviate from it. Researchers use traditional computer vision algorithms or also come up with deep learning models which are trained on huge annotated datasets to precisely predict the lanes. This article describes an approach to lane detection specifically used by automated bots participating in the Intelligent Ground Vehicle Challenge (IGVC). The algorithm uses openCV functions mostly and follows an image pipeline to properly segment and return the direction vector in terms of magnitude so that it can be sent to the bot as steering messages. We verified the results by performing navigation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Kawatsu C, Li J, Chung CJ (2014) Obstacle & lane detection and local path planning for IGVC robotic vehicles using stereo vision. Robot intelligence technology and applications, vol 2. Springer, Berlin, pp 667–675
Li M, Li Y, Min J (2018) Lane detection based on connection of various feature extraction methods. Adv Multimedia
Phueakjeen W, Jindapetch N, Kuburat L, Suvanvorn N (2011) A study of the edge detection for road lane. In: The 8th electrical engineering/electronics, computer, telecommunications and information technology (ECTI) association of Thailand-Conference 2011. IEEE, New York, pp 995–998
Wei X, Zhang Z, Chai Z, Feng W (2018) Research on lane detection and tracking algorithm based on improved Hough transform. In: 2018 IEEE international conference of intelligent robotic and control engineering (IRCE). IEEE, New York, pp 275–279
Kim J, Lee M (2014) Robust lane detection based on convolutional neural network and random sample consensus. In: International conference on neural information processing. Springer, Berlin, pp 454–461
Neven D, De Brabandere B, Georgoulis S, Proesmans M, Van Gool L (2018) Towards end-to-end lane detection: an instance segmentation approach. In: 2018 IEEE intelligent vehicles symposium (IV). IEEE, New York, pp 286–291
Bojarski M, DDel Testa M, DDworakowski M, Firner B, Flepp B, PGoyal B, D Jackel L, Monfort M, Muller U, Zhang J et al (2016) End to end learning for self-driving cars. arXiv preprint arXiv:1604.07316
JKim J, Park C (2017) End-to-end ego lane estimation based on sequential transfer learning for self-driving cars. In: Proceedings of the IEEE conference on computer vision and pattern recognition workshops, pp 30–38
Chen Z, XHuang Z, (2017) End-to-end learning for lane keeping of self-driving cars. In: 2017 IEEE intelligent vehicles symposium (IV). IEEE, New York, pp 1856–1860
Ho ML, Chan PT, Rad AB (2009) Lane change algorithm for autonomous vehicles via virtual curvature method. J Adv Transp 43(1):47–70
Chowdhary CL, Goyal A, Vasnani BK (2019) Experimental assessment of beam search algorithm for improvement in image caption generation. J Appl Sci Eng 22(4):691–698
Murphey RA, Pardalos PM, Pitsoulis LS (1997) A greedy randomized adaptive search procedure for the multitarget multisensor tracking problem. Network Des: Connect Facilities Location 40:277–302
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Samantaray, S., Deotale, R., Chowdhary, C.L. (2021). Lane Detection Using Sliding Window for Intelligent Ground Vehicle Challenge. In: Raj, J.S., Iliyasu, A.M., Bestak, R., Baig, Z.A. (eds) Innovative Data Communication Technologies and Application. Lecture Notes on Data Engineering and Communications Technologies, vol 59. Springer, Singapore. https://doi.org/10.1007/978-981-15-9651-3_70
Download citation
DOI: https://doi.org/10.1007/978-981-15-9651-3_70
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-9650-6
Online ISBN: 978-981-15-9651-3
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)