
Abstract
In 3D reconstruction, point cloud plays an essential role in holding the geometric information of the target object. After acquiring the data through the 3D laser scanner or image-based method, several point cloud software currently available on the market is selected to analyze and process the point cloud. In this paper, efforts are made to convert the point cloud into a simplified 3D model or a geometric mesh model. Then, each software used in the Scan-to-BIM process is evaluated exhaustively. Functional assessments for the software application include formats that can be imported and exported, the ability to process and analyze data, and the capability to model 3D models or meshes.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
3D reconstruction is a reverse engineering method for creating the 3D model of the existing physical object or scene. Nowadays, the techniques of 3D reconstruction have become more sophisticated and popularly used in various fields such as civil engineering [1]. Currently, there are two main three-dimensional reconstruction techniques, which are laser-scanning-based and image-based [2]. By emitting laser beams, the terrestrial laser scanner (TLS) can capture the spatial data as well as texture information of the object from the reflected laser beam to build a point cloud. For the image-based method, the depth, color, and spatial information of the target object are computable from the pictures with the algorithms, such as SfM (Structure from Motion) algorithm to construct the point cloud.
The resulting point cloud often carries the geometric, spatial, and texture information of the object, which is an indispensable core data for modeling. The accurate and efficient processing techniques or algorithms of the point cloud is crucial to extract semantic information from these massive 3D data [3]. These algorithms initiate by classify point cloud into segments in the form of lines or surface and then generating the primitive 3D models from these segments [4]. Ideally, the early generation models are able to be further processed into as-built models in the form of Computer-Aided Design (CAD) [5, 6] or Building Information Models (BIM) [7, 8]. After that, the applications such as automatic change detection and deformation monitoring of structures can be realized [9, 10]. However, segmenting point clouds is challengeable, especially for infrastructures, since these dense 3D data is normally noisy, and tend to have uneven point distribution (for both SfM and TLS). Some of the noise caused by the laser scanner or camera sensors, unavoidable surveying conditions and moving objects. Meanwhile, large-scale infrastructures, varying construction materials (from featureless to very texture-rich) and scene complexity are the common causes of uneven point distribution [11]. Although in the commercial sphere, the level of automation of software solution for processing point clouds, particular in recognizing objects from dense points, remain limited [12], it is still a convenient and effective way for the industry to get a quick primary as-built model of construction site. Therefore, the selection of point cloud processing software is an essential step for obtaining the desired 3D model.
2 Software Evaluation
In this paper, a few commercial software with similar featured function is chosen for comparing and evaluating to find out the most suitable software in performing a specific task. The evaluation progress begins by listing the overall point cloud processing software and the background information. Then, the importing and exporting of point cloud file formats are discussed. Next, the methods and difficulty in processing and analyzing cloud point data in respective software will be introduced, and finally, the process and outcome of 3D modeling are described. Figure 1 shows the covered aspects of software evaluation in this paper.

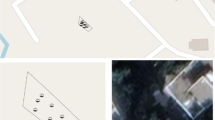
Results from Reality Capture
2.1 Overview of the Software Background Information
Table 1 shows a summary of the point cloud processing software that is tested and discussed in this paper and it is composed of the version, operating system, year of release, status of update, development team, installation size, availability and function of the software. There are a total of nine software applications that are experimented in the process of generating mesh and 3D models. The software is categorized in respective functions from generating a point cloud, analyzing and surveying of the point cloud to the modeling of the 3D model.
Cyclone comes along with the purchase of Leica ScanStation P30 laser scanner and is the only medium for exporting the raw scan data. Besides, it does have a specific function such as cleaning noise, merging point cloud, and reducing the file size before exportation. Then, Reality Capture and 3DF Zephyr have similar function in producing and measuring of point cloud model. On the other hand, 3D Reshaper and CloudCompare are featuring in the processing (e.g., segmentation and extraction of point cloud) and analyzing (e.g., surveying and 3D comparison) of point cloud model whereas 3D Reshaper, Rapidform XOR3, and Autodesk 3Ds Max can generate mesh from the point cloud. Lastly, Autodesk Revit is the only commercial software for constructing a BIM model from point cloud. Among the software in Table 1, only Autodesk 3Ds Max and Autodesk Revit is not capable of measuring the distances between points in point cloud model.
2.2 Importing and Exporting of File Formats
Table 2 shows the availability of file formats for importing and exporting (file format for mesh is excluded) in each software. It is worth mentioning that the table may not include all the formats for the point cloud. It is essential for the Scan-to-BIM process that the file format is importable to other software without losing any information as it benefits the process of 3D modeling. For example, the raw scan data acquired based on the laser scanner is not a standard point cloud format that can be opened in every software. Thus, the original data need to be imported into the Cyclone for exporting to another acceptable file format such as ptx. The importation of point cloud into Autodesk Revit is difficult without losing any color and texture information. The software only accepts rcs, dxf and rcp file format and the only way to convert the point cloud to these formats is by importing the point cloud into Autodesk Recap for conversion. Table 2 can be used as a reference for format conversion for different software.
2.3 Generating Point Cloud, Mesh and 3D Model
The evaluation is divided into two parts, which are the time consume and the result of modeling. This section compares the degree of Scan-to-BIM and the difficulty of operation. Table 3 shows the time spent for importing and exporting of the point cloud as well as the time spent for modeling and generating a point cloud for the software used in the project. For image-based method, point cloud and mesh are generated in Reality Capture and 3DF Zephyr automatically. Whereas for laser-scanning-based method, 3D Reshaper and Rapidform are used for the automatic modeling of meshes, and Autodesk 3ds MAX can only perform manually in producing the mesh. Similarly, a simplified 3D model is constructed manually in Autodesk Revit. Therefore, according to the data in Table 3, automated modeling software takes much less time than manual modeling software.
2.3.1 Image-Based Point Cloud Model
The main function of Reality Capture and 3DF Zephyr is to produce point cloud model from images. Therefore, evaluation is made in terms of the time for producing and the resulting model. In Reality Capture, the point cloud and mesh model are produced automatically in 5 h with normal setting. The total images utilized in the generating process is 2968 out of 3214. A total of 80,341,877 points of point cloud model and 160,285,002 polygons of mesh model are produced as shown in Fig. 1. There are some missing points in the ceiling and the floor of the underground passage, but the rest of the model is fine.
In 3DF Zephyr, it took 13 h for generating the point cloud and mesh model which is longer than Reality Capture with the setting set to default. The total images employed in the computation are 1229 images out of 3241 images. The points in point cloud model are 9,686,947 while the polygons number in mesh model are 19,562,159 which is lesser than the resulting model of Reality Capture. Although there is fewer missing points in the ceiling and the floor, they both appear to be uneven and bumpy as shown in Fig. 2.

Results from 3DF Zephyr
2.3.2 Mesh Model
In 3D Reshaper, the imported point cloud model can be viewed with particular RGB color that holds the intensity of the reflected signal of the laser scanner, as shown in Fig. 3a. The texture information of the wall in the underground passage remains in the point cloud model, although there is no color information. The software can produce meshes automatically based on the point cloud. However, the proper setting of distance between points is vital in the modeling preparation interface before modeling mesh as it will affect the result of modeling. The ability to model the mesh automatically saves a considerable amount of time, and the mesh produced has a similar missing part as the point cloud model at the staircase, as shown in Fig. 3b. Lack of texture information and dissatisfying accuracy can be noticed in the model.

Results from 3D reshaper
RapidForm XOR can process extensive point cloud data rapidly. The software employs both the point cloud data and texture information into the operations to produce a textured mesh model automatically. Although the final mesh model retains rich texture information, the model will have a lot of missing parts compared to the previous mesh model. Figure 4a shows the point cloud model, while Fig. 4b shows the mesh model with the texture preserved.

Results from RapidForm XOR
In Autodesk 3ds Max, point cloud need to be converted to rcp and rcs format beforehand in Autodesk Recap. Figure 5b shows the point cloud in rcp format. The modelling of mesh is performed manually in four different views to build the surface in corresponding directions. The formation of the wall can be done by copying the boundary line on the point cloud model from the top view as shown in Fig. 5a. Then, by selecting extrude functions in the software, height and shape of the wall can be inserted to form the wall. The process is repeated for other elements until the whole underground passage is fully reconstructed. Figure 5c shows the components in the model is totally flat and smooth. Compared with the model built automatically, the boundary between the ground and the wall is clear and the mesh model does not have any missing parts. However, the mesh model is composed of thin slices of surface without thickness.

Modelling in 3Ds max
2.3.3 Simplified 3D Model
In Autodesk Revit, a simplified 3D model can be constructed manually by using the functions and tools. With the point cloud imported into the 3D space, the dimensions of the component in the point cloud can be measured and recorded in the software to form the desired shape with correct dimensions. Autodesk Revit comes along with content libraries and families, which allows the simple construction of MEP and light bulb on the ceiling. The built 3D model has high integrity, and each component is built according to its respective height, length, and width measure along with the point cloud model. Therefore, the built model has a higher accuracy compare to automatically modeled one, as shown in Fig. 6.

Results in Revit
3 Conclusion
Based on the evaluations in this paper, each software has its advantages in performing different functions. A practical and time-saving method is the prior selection for the software to reconstruct the model in this paper. Therefore, in the image-based method point cloud and mesh modeling, Reality Capture outperforms 3DF Zephyr in terms of time while 3D Reshaper is a better option to obtain the mesh model. However, there is no other option to obtain a 3D model other than Autodesk Revit. Even though the model produced is only a simplified geometry model, the software provides the possibility for creating a BIM model by inputting semantic information into the model. Future work will be focusing on the methods for the automatic modeling of a 3D model that carry semantic information.
References
Wang, Q., & Kim, M. (2019). Applications of 3D point cloud data in the construction industry: A fifteen-year review from 2004 to 2018. Advanced Engineering Informatics, 39, 306–319.
Ma, Z., & Liu, S. (2018). A review of 3D reconstruction techniques in civil engineering and their applications. Advanced Engineering Informatics, 37, 163–174.
Khaloo, A., & Lattanzi, D. (2017). Robust normal estimation and region growing segmentation of infrastructure 3D point cloud models, Advanced Engineering. Informatics, 34, 1–16.
Dimitrov, A., & Golparvar-Fard, M. (2015). Segmentation of building point cloud models including detailed architectural/structural features and MEP systems. Automation in Construction, 51, 32–45.
Son, H., Kim, C., & Kim, C. (2015). 3D reconstruction of as-built industrial instrumentation models from laser-scan data and a 3D CAD database based on prior knowledge. Automation in Construction, 49, 193–200.
Dimitrov, A., Gu, R., & Golparvar-Fard, M. (2016). Non-uniform B-spline surface fitting from unordered 3D point clouds for as-built modeling. Computer-Aided Civil and Infrastructure Engineering, 31(7), 483–498.
Jung, J., Hong, S., Yoon, S., Kim, J., & Heo, J. (2015). Automated 3D wireframe modeling of indoor structures from point clouds using constrained least-squares adjustment for as-built BIM. Journal of Computing in Civil Engineering, 30(4), 04015074.
Gao, T., Ergan, S., Akinci, B., & Garrett, J. (2014). Evaluation of different features for matching point clouds to building information models. Journal of Computing in Civil Engineering, 30(1), 04014107.
Cabaleiro, M., Riveiro, B., Arias, P., & Caamaño, J. C. (2015). Algorithm for beam deformation modeling from LiDAR data. Measurement, 76, 20–31.
Jafari, B., Khaloo, A., & Lattanzi, D. (2017). Tracking structural deformations via automated sample-based point cloud analysis. Computing in Civil Engineering, 2017, 403–410.
Rebolj, D., Pučko, Z., Babič, N. Č, Bizjak, M., & Mongus, D. (2017). Point cloud quality requirements for scan-vs-BIM based automated construction progress monitoring. Automation in Construction, 84, 323–334.
Bosché, F., Ahmed, M., Turkan, Y., Haas, C. T., & Haas, R. (2015). The value of integrating scan-to-BIM and scan-vs-BIM techniques for construction monitoring using laser scanning and BIM: The case of cylindrical MEP components. Automation in Construction, 49, 201–213.
Acknowledgements
The authors gratefully acknowledge the financial support of the Xi’an Jiaotong-Liverpool University (SURF-201927).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ge, S., Wang, Z., Lo, Y., Zhang, J., Zang, R., Zhang, C. (2021). Evaluation of Point Cloud Processing Software for 3D Reconstruction. In: Ye, G., Yuan, H., Zuo, J. (eds) Proceedings of the 24th International Symposium on Advancement of Construction Management and Real Estate. CRIOCM 2019. Springer, Singapore. https://doi.org/10.1007/978-981-15-8892-1_89
Download citation
DOI: https://doi.org/10.1007/978-981-15-8892-1_89
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-8891-4
Online ISBN: 978-981-15-8892-1
eBook Packages: Business and ManagementBusiness and Management (R0)