
Abstract
Damping of power system oscillations is highly important. Considering the response speed of the stabilizer, the design and choice of power system stabilizer (PSS) are vital. Traditional power systems employ power system stabilizers that were sluggish. As the grid is becoming smarter, flexible AC transmission system (FACTS) devices started playing a major role. Series compensation devices like Thyristor controlled series compensator (TCSC) are fast and have good dynamic response to damp the oscillations. This paper demonstrates the efficacy of TCSC for enhancing the power system transient stability in a single machine infinite bus system (SMIB). The controller parameters of TCSC are fine-tuned based on particle swarm optimization (PSO) technique. The synergistic operation of PSS and TCSC approach presented in this paper serves to an efficient technique to enhance the transient stability compared to conventional stabilizers.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Power system stabilizer (PSS)
- Particle swarm optimization (PSO)
- Small signal oscillations
- SMIB
- Thyristor controlled series compensator (TCSC)
1 Introduction
The major problem associated with the power system today is inter-area oscillations ranging from a frequency of 0.2–2 Hz that could be long lasting [1]. This can further hamper the stability of the system resulting in larger disturbances following the smaller oscillations. Damping such oscillations within a short span of time is really critical. Several devices are installed in the power system network to damp such oscillations. Automatic voltage regulators (AVRs) are one among such devices installed in the system to regulate the voltage and provide damping. But, the response of AVR has not been satisfactory. With the introduction of power system stabilizers (PSSs), additional damping torque could be introduced in the system to damp these oscillations.
2 Power System Stabilizer
Power system stabilizers have been used for a long time in US and Canada while PSS have been employed in UK to damp the oscillations in tie lines. In case of weak tie lines in a long distance transmission system, PSS play a vital role. Although the application of PSS during steady state is limited, it possesses excellent damping capability. As the grid is becoming smarter, the role of FACTS devices started playing a major to provide an enhanced level of oscillation damping in the system. A typical block diagram of PSS is shown in Fig. 1.

A typical power system stabilizer
3 Implementation of TCSC
TCSC-based FACTS device has a Thyristor controlled reactor (TCR) in parallel with a fixed capacitor (FC). The inductance in TCR could be varied by altering the firing angle from 0 to 90° for achieving a smooth variation of inductance. Along with the FC, the required rating of net TCSC reactance could be achieved [2,3,4,5].
4 FACTS-Based Stabilizer
A SMIB system is considered for evaluating the efficacy of TCSC. The complexity in case of SMIB is less. So, for the analysis purpose in reducing the complexity, testing of the TCSC device on a SMIB system is carried out. A bus, whose frequency and voltage (in both magnitude and angle) are constant, is considered to be an infinite bus. The dynamic response of the synchronous generator is a little difficult in analyzing considering the non-linearity complexities associated with it. It is a well-known fact that the non-linearity is due to the magnetic saturation. The dynamic generator system involving the third order classical model is considered along with the non-linearities. FACTS devices like TCSC possesses excellent capabilities to improve the small signal stability of the power system. When there is a sudden increase or decrease in loading, the generator slows down or speeds up correspondingly. As a result the frequency also decreases and increases, respectively. When subjected to such a situation, the oscillations occur in the synchronous generator.
Further, with normal capacitive compensation with a simple series capacitor, it can also lead to a phenomenon of sub synchronous resonance (SSR). With the utilization of TCSC, small signal oscillations and SSR could be mitigated easily considering the fact that TCSC has an enhanced capability to damp out the oscillations and also provide series capacitive compensation. Stabilizers are implemented in the system to damp the oscillations during a transient condition.
TCSC has primarily been employed to increase the power transfer capacity in a transmission line. This is done by varying the firing angle of the TCR to provide the necessary series compensation in capacitive mode.
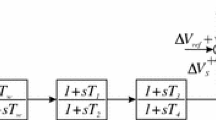
Apart from providing series compensation, TCSC can play a major in oscillation damping. During abnormal conditions, a conventional power system stabilizer (CPSS) considers the generator power output and the speed of the rotor or both as an input signal to generate a voltage signal. This signal is compared with a reference voltage signal by the CPSS. Although AVR has been used as a stabilizer, the response of the AVR is slow. So, an enhanced and quick control action was needed to overcome the cons associated with the conventional-based stabilizers. TCSC-based stabilizer on the other hand, generates a reactance-based signal in comparison with the transmission line reactance that is continuously altered by suitable gating pulses to the Thyristors [6,7,8]. In this paper, the efficacious nature of TCSC involving its synergism with PSS for small signal oscillation damping is studied. The controller parameters of TCSC are optimized and designed using particle swarm optimization (PSO) technique [7]. Figure 2 presents the controller block of TCSC-based PSS.

TCSC-based PSS design
5 Proposed Methodology
Figure 2 presents the block diagram of TCSC-based controller PSS that is designed and optimized using PSO. Figure 3 presents the excitation system with PSS. Figure 4 presents an AVR that compares the voltage at the output against a reference voltage to produce an error signal that is fed to the proportional-based controller to maintain the output voltage as constant. A suitable limiter is used to keep Efd value within the limits. If this limit is exceeded, then Efd is fixed. The per unit torque equation of generator in d-q reference frame is given as

Control block diagram of excitation system

Excitation system of synchronous generator with PSS
State space equations of TCSC and excitation model are given as
Figure 5 depicts the schematic diagram of SMIB system with TCSC. The variation in the reactance of TCSC could be achieved by changing the firing angle in order to achieve the sufficient damping during abnormal conditions. When the rotor speed varies, it is given as an input in this case. PSS generates a voltage that is added with the reference voltage.

Single machine system with AVR and PSS
At the terminals of the generator, a 3-phase fault is created and the clearance is achieved after 5 cycles for a 50 Hz system. There are three conditions considered during the fault. One is the lightly loaded condition, normal loaded, and heavily loaded conditions. A fault is created at 1 s. and cleared at 1.1 s. As a result, the oscillations in the response of the system are observed with AVR and CPSS in place to check for their dynamic response in damping the oscillations. The same system is then tested with TCSC in place in synergism with CPSS and AVR. It could be well witnessed from the results that the TCSC-based stabilizer improves stability of the system by damping the oscillations very quickly in comparison with system with CPSS and without any controller.
Machine parameters are:
Particle swarm optimization (PSO)-based control parameters are:
6 Simulation Results
The TCSC-based PSS for generator model is simulated by creating a fault. Since the existence of non-linearities are evident due to the generator model, performing a linearized analysis of the system around the equilibrium point is highly essential. The analysis has been carried for different levels of loading during different fault conditions. Three loading conditions are.
-
(A)
Mechanical input Pm = 0.3 p.u—Lightly loaded conditions
-
(B)
Mechanical input Pm = 0.6 p.u—Normally loaded conditions
-
(C)
Mechanical input Pm = 0.85 p.u—Heavily loaded conditions.
The synergistic operation of CPSS and TCSC-based stabilizer is carried out using PSO with various time constants and gains of CPSS and TCSC-based stabilizer. A three-phase fault is created for 5 cycles lasting from t = 1 s. to t = 1.1 at an operating frequency of 50 Hz. The rotor angle, rotor speed, and power output variation are simulated using Euler’s method for three loading conditions. For heavy loading conditions, it is carried out for 20 s, for normal loading it is done for 12 and 6 s for lightly loaded conditions (Figs. 6, 7, 8, 9, 10, 11, 12, 13 and 14).

Response of rotor angle (Pm = 0.3)—light loading

Response of rotor speed (Pm = 0.3)—light loading

Power output-light loading (Pm = 0.3)

Power output-normal loading (Pm = 0.6)

Rotor speed-normal loading (Pm = 0.6)

Power-normal loading (Pm = 0.6)

Rotor angle-heavy loading (Pm = 0.85)

Rotor angle-heavy loading (Pm = 0.85)

Power-heavy loading (Pm = 0.85)
7 Further Insight
Further, in a smart grid environment when more renewable energy resources and plug in electric vehicles are integrated into a sub transmission and distribution network, the stability of the system becomes a vital aspect and FACTS devices are playing a major role in damping such oscillations. With the introduction of smart inverters into the system as FACTS devices, such damping can be easily performed by them by means an auxiliary control associated with the smart inverters [9,10,11,12,13].
8 Conclusion
It could be well witnessed from the studies that TCSC-based PSS that has been employed in a single machine infinite bus power system has a greater edge compared to the CPSS in improving the dynamic performance of the system under unbalanced conditions. The system stability, speed of the rotor, torque angle (angle of the rotor), and power output with TCSC-based PSS presented an improved response with fast damping compared to the system without the conventional PSS.
References
Kundur P, Balu NJ, Lauby MG (1994) Power system stability and control, vol 7. McGraw-Hill, New York
Hingorani NG, Gyugyi L (2000) Understanding FACTS: concepts and technology of flexible AC transmission systems. IEEE Press, New York
Varma RK, Rangarajan SS, Axente I, Sharma V (2011) Novel application of a PV solar plant as STATCOM during night and day in a distribution utility network. In: 2011 IEEE/PES power systems conference and exposition, Phoenix, AZ, pp 1–8
Berge J, Rangarajan SS, Varma RK, Litzenberger WH (2011) Bibliography of FACTS 2009–2010: part IV IEEE working group report. 2011 IEEE power and energy society general meeting. Detroit, MI, USA, pp 1–10
Berge J, Rangarajan SS, Varma RK, Litzenberger WH (2011) Bibliography of FACTS 2009–2010: part III, IEEE working group report. In: Proceedings of IEEE PES general meeting, Detroit
Mozumder S, Dhar A, Rangarajan SS, Karthikeyan SP. Coordinated operation of multiple inverter based renewable distributed generators as an active power injector and reactive power compensator. 2014 international conference on computation of power, energy, information and communication (ICCPEIC), Chennai, 2014, pp 298–303
Sunkara SK, Narne R, Panda PC (2013) Co-ordinated tuning of PSS with TCSC damping controller through advanced adaptive PSO for a multi-machine power system. 2013 international conference on energy efficient technologies for sustainability. IEEE, Nagercoil, pp 1097–1102
Koohi I, Groza VZ (2014) Optimizing particle swarm optimization algorithm. In2014 IEEE 27th Canadian conference on electrical and computer engineering (CCECE), Toronto, ON, pp 1–5
Poyyamani Sunddararaj S, Rangarajan SS, Gopalan S (2019) Neoteric fuzzy control stratagem and design of chopper fed multilevel inverter for enhanced voltage output involving plug-in electric vehicle (PEV) applications. Electronics 8:1092
Rangarajan SS, Collins ER, Fox JC (2017) Detuning of harmonic resonant modes in accordance with IEEE 519 Standard in an exemplary North American distribution system with PV and Wind. In: 6th IEEE international conference on renewable energy research and applications, San Diego
Rangarajan SS, Collins ER, Fox JC (2018) Smart PV and SmartPark Inverters as suppressors of Temporary Over-Voltage (TOV) phenomenon in distribution systems. IET Gener Trans Distrib J
Rangarajan SS, Collins ER, Fox JC (2019) Efficacy of Smart PV inverter as a virtual detuner in mitigating network harmonic resonances. Elsevier Electr Power Syst Res J
Rangarajan SS, Collins ER, Fox JC, Kothari DP (2018) Consolidated compendium of PV interconnection standards across the globe in a smart grid environment. J Energy Technol Res UK
Acknowledgements
Authors are highly grateful and thankful to SASTRA Deemed to be University for providing the support to carry performing the research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sharma, J. et al. (2021). Synergistic Damping Operation of TCSC and CPSS Using PSO in a Power System. In: Reddy, M.J.B., Mohanta, D.K., Kumar, D., Ghosh, D. (eds) Advances in Smart Grid Automation and Industry 4.0. Lecture Notes in Electrical Engineering, vol 693. Springer, Singapore. https://doi.org/10.1007/978-981-15-7675-1_2
Download citation
DOI: https://doi.org/10.1007/978-981-15-7675-1_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-7674-4
Online ISBN: 978-981-15-7675-1
eBook Packages: EnergyEnergy (R0)