
Abstract
With the ever-increasing complexity of disturbed Power Systems, the method of protection using electromagnetic relays may not be adequate to afford appropriate discrimination especially when the fault current flows in parallel paths. Because the electromagnetic relay has slow response time, and the fact that it is a mechanical device and has moving parts, over a period of time, these moving parts will wear out and the relay will fail. To overcome these drawbacks, a more reliable means of system protection was carried out using solid-state contactless devices. A modular technique using five blocks made up of power supply unit, current sensor unit, voltage sensor unit, switching unit and output unit were used in the study design. A 66 kV power network was used to test the reliability of the protection designed circuit. Result shows enhanced system security.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Power system protection is an act of ensuring availability of electric power without any interruption to every load connected to it [1]. The main purpose of power system protection is to isolate a faulty section of electrical power system from rest of the live system so that the rest potion can function satisfactorily without any sever damage due to fault current [2]. Overload, temporary faults, permanent faults, lightning strokes, induced lightning surges are of common occurrences in power systems. It is there important to ensure that the fault part is quickly disconnected from rest of the system so that damage is minimum. Most common type of abnormal conditions and faults in power system are: over-currents (overloads), sparking and arcing-grounds on overhead lines, short-circuits, flashovers due to lightning surges, faults due to insulation failure, temporary over-voltages/under-voltages of power frequency, unbalance of three phase voltages, etc. The faults on overhead lines are either temporary/transient or permanent [2]. Protective devices consist of mainly power system relays like current relays, voltage relays, impedance relays, power relays, frequency relays, etc. During fault, the protective relay gives signal to the associated circuit breaker for opening its contact. All the circuit breakers of electric power systems are direct current (dc) operated. Because dc can be stored in battery and if situation comes when total failure of incoming power occurs, still the circuit breakers can be operated for restoring the situation by the power of storage station battery. Hence, the battery is another essential item of the power system. Auto-reclosing of circuit breakers is adopted for overhead power systems to achieve service continuity after temporary faults. Auto-reclosing circuit breakers are used for overhead distribution feeders. They are not used for underground systems [3].
1.1 Components of Protective Schemes
-
1)
Current Transformers (CTs)
In order to obtain currents which can be used in control circuits and that are proportional to the system primary currents, current transformers are used. Often the primary conductor itself, for example a bus-bar, forms a single primary turn (bar primary). Whereas instrument current transformers have to remain accurate only up to slight over-currents, protection current transformers must retain proportionality up to at least 20 times normal full load. The normal secondary current rating of current transformers is now usually 1 A, but 5 A has been used in the past. A major problem can exist when two current transformers are used which should retain identical characteristics up to the highest fault current, for example in pilot wire schemes. Because of saturation in the silicon steel used and the possible existence of a direct component in the fault current, the exact matching of such current transformers is difficult.
-
2)
Linear Couplers
The problem associated with current transformers have resulted in the development of devices called linear couplers, which serve the same purpose but, having air-cores, remain linear at the highest currents. These are also known as Rogowski coils and are particularly suited to digital protection schemes.
-
3)
Relays
A relay is a device which, when supplied with appropriately scaled quantities, indicates an abnormal or fault condition on the power system, when the relay contacts close, the associated circuit-breaker trip-circuits are energized and the breaker opens, isolating the faulty part of the power network. Historically electromagnetic and semiconductor relays were installed and are still in use on the system. Modern practice is to install digital (numerical) protection. Although now almost all new relays use micro-processors and the measured quantities are manipulated digitally, the underlying techniques are often those developed for electro-mechanical relays. The use of electromechanical relay (EMR) in protecting perturbed electric network has been in use in power system engineering over years. However, the EMR are inexpensive, easy to use and allow the switching of load circuit controlled by low power, electrically isolated input signal [4]. One of the main disadvantages of an EMR is that it is a “mechanical device”, that is, it has moving parts so the switching speeds (response time) due to physical movement of the metal contacts using a magnetic field is slow. Over a period of time these moving parts will wear out and fail, or that the contact resistance through the constant arcing and erosion may make the relay unstable and shortens its life span. Also, it is electrically noisy with the contacts suffering from contact bounce which may affect any electronic circuits to which it is connected [5]. However, as a result of these disadvantages, there is need therefore, to device a more reliable means to overcome these disadvantages, hence the use of a solid-state relay (SSR) which is a solid state contactless, pure electronic relay. The SSR being purely electronic devices has no moving parts within its design as the mechanical contacts have been replaced by power transistors, thyristors or triac. The electrical separation between the input control signal and the output load voltage is accomplished with the aid of an opto-coupler (a component that transfers electrical signals between two isolated circuits by using light) type light sensor. Continuous rise in interconnection of loads/systems to the power system topology of most countries has resulted in higher demand of power which in most cases cannot be provided or supplied by generating stations (with several generating units in a single area network). To meet up with the demand, in most cases it leads to faults occurring on the power system network, such as: over loading; short circuit; and over voltage and under voltage. It is as a result of these operational challenges encountered in the Nigeria Power System that motivated this work.
The objectives of this work are:
-
To isolate a faulty section of electrical power system from the rest of the live system so that the portion can function satisfactorily without any severe damage due to fault current.
-
To increase efficiency and reduce cost of protection by the use of SSR.
-
To prevent damage to the system apparatus from hazards (like fire) with the help of SSR.
-
To greatly improve on the transient state stability limit of the system.
-
To avoid permanent damage to the equipment and also to reduce possibility of developing simplest fault into more severe fault.
2 System Protection
Power system protection emerged at the beginning of the last century, with the application of the first electro-mechanical overcurrent relay. The majority of the protection principles currently employed in protection relays were developed within the first three decades of the last century, such as over current, directional, distance and differential protection. The development of modern science and technology, especially electronic and computer technology, promoted the development of relay technology, such as materials, components and the manufacturing process of the hardware structure of relay protection device. At the same time, great theoretical progress had been made in the relay protection software, algorithms, etc. [6]. The progress in modern technology stimulates the development in power system protection. In the last century, relay protection had gone through a number of development stages, migrating from mechanical to electro-mechanical, and subsequently to solid state semiconductor technologies. Today, solid state relays are replacing conventional relays in all areas of power system protection. However, many of the same relaying principles of protection are still playing dominant role to date [7]. In order to attain the desired reliability, the power system network is divided into different protection zones: generator protection, transformer protection, transmission line protection, bus protection and feeder protection [8].
2.1 Generator Protection
A generator is subjected to electrical traces imposed on the insulation of the machine, mechanical forces acting on the various parts of the machine, and temperature rises. Even when properly used, a machine in its perfect running condition does not only maintain its specified rated performance for many years, but it does also repeatedly withstand certain excess of over load. Hence, preventive measures must be taken against overloads and abnormal conditions of the machine so that it can serve safely. Despite of sound, efficient design, construction, operation, and preventive means of protection, the risk of that fault cannot be completely eliminated from any machine [8]. The devices used in generator protection, ensure the fault, is rectified as quickly as possible. An electrical generator can be subjected to either internal fault or external fault or both. The generators are normally connected to an electrical power system, hence any fault occurred in the power system should also be cleared from the generators as soon as possible otherwise it may create permanent damage in the generator. The number and variety of faults occur in generator are huge. Great care is to be taken in coordinating the systems used and the settings adopted, so that the sensitive, selective and discriminative generator protection scheme is achieved [9]. The various forms of protection applied to the generator can be categorized into two manners: protective relays to detect faults occurring outside the generator and protective relays to detect faults occurring inside the generator. Other than protective relays, associated directly with the generator and its associated transformer, there are lightening arrestors, over speed safe guards, oil flow devices and temperature measuring devices for shaft bearing, stator winding, transformer winding and transformer oil etc. some of these protective arrangements are of non-trip type which only generate alarm during abnormalities. But the other protective schemes ultimately operate master tripping relay of the generator. It should be noted that no protective relay can prevent fault, it only indicates and minimizes the duration of the fault to prevent high temperature rise in the generator otherwise there may be permanent damage. It is desirable to avoid undue stresses in the generator, and for that it is a usual practice to install surge capacitor or surge diverter or both to reduce the effects of lightning and other voltage surge on the machine.
2.2 Transformer Protection and Transformer Fault
There are different kinds of transformers for example: core or auto transformers etc. And in terms of windings there are: two-winding or three-winding transformers. Different transformers, demand different scheme of transformer protection depending on their importance such as: winding connections, earthing methods and mode of operation etc. It is a common practice to use Buchholz relay protection for all 0.5 MVA and above transformers. While for small size transformers, only high voltage fuses are used as main protective devices. For medium transformers, over current protection along with restricted earth fault protection is applied. Differential protection should be provided in the transformers rated above 5 MVA [10]. Although an electrical power transformer is a static device, but internal stresses arising from abnormal system conditions must be taken into consideration. Transformers generally suffer from the following types of faults: over current due to overloads and external short circuit, terminal fault, Winding fault, and incipient fault. These faults cause mechanical and thermal stresses inside the transformer winding and its connecting terminals. Thermal stresses lead to overheating which ultimately affect the insulation system of the transformer. Deterioration of insulation leads to winding faults. Sometime failure of transformer cooling system, leads to overheating of transformer. So, the transformer protection schemes are very much required. The short circuit current of a transformer is normally limited by its reactance and for low reactance; the value of short circuit current may be excessively high. Whatever may be the fault, the transformer must be isolated instantly during fault otherwise major breakdown may occur in the electrical power system.
2.3 Bus-Bar Protection/Bus-Bar Differential Protection Scheme
In the early days, only conventional over current relays were used for bus-bar protection. But it is desired that fault in any feeder or transformer connected to the bus-bar should not disturb bus-bar system. In viewing of this time setting of bus-bar protection relays are made lengthy. So, when faults occur on bus-bar, it takes much time to isolate the bus from the source which may cause much damage in the bus system [11]. In recent days, the second zone distance protection relays on incoming feeder with operating time of 0.3 to 0.5 s have been applied for bus-bar protection. The disadvantage of the scheme is that it cannot discriminate the faulty section of the bus-bar. Nowadays, electrical power system deals with huge amount of power. Hence any interruption in total bus system causes big loss to the company. So, it becomes essential to isolate only faulty section of bus-bar during bus fault. Another drawback of the second zone distance protection scheme is that sometimes the clearing time is not short enough to ensure the system stability. To overcome this difficulty, differential bus-bar protection scheme with an operating time less than 0.1 s, is commonly applied to high voltage bus systems using kirchhoff’s current first law as shown in Fig. 1.

Current differential protection circuit
In Fig. 1, the secondary of CTs are connected in parallel and S1 terminals of all CTs are connected together and a bus wire is formed. Similarly, S2 terminals of all CTs are connected together to form another bus wire. A tripping relay is connected across the two bus wires.
2.4 Protection of Transmission Lines and Feeders
Whenever the transmission line is long and run through open atmosphere, the probability of fault occurring in the transmission line is much higher than that of power transformers and alternators. That is why a transmission line requires much more protective schemes than transformers and alternators [12]. Protection of transmission line should have some special features such as:
-
Tripping of circuit breaker closest to the fault point during fault.
-
In case the circuit breaker closest is faulty, the next circuit breaker should trip as back up.
-
The operating time of relay associated with protection of line should be as minimum as possible in order to prevent unnecessary tripping of circuit breakers association with other healthy parts of power system.
These requirements cause protection of transmission line much different from protection of transformer and other equipment of power systems [13]. There are three methods of protecting the transmission line: time graded over current protection, differential protection and distance protection.
2.5 Protective Relay
A relay can be operated with a small amount of power and can be used to control devices that need much more power like circuit breakers and isolators. A relay is like a remote-controlled switch and has many applications because of its long life, high accuracy, relative simplicity and proven high reliability [14]. This is very useful when controlling a requirement of huge amount of voltage or current with the use of a small electrical signal. In the industry, a wide variety of applications requires the use of relays. Electrical power systems can be protected against fault using sophisticated relays [15]. Initially, for a normally opened relay, the contact is normally open which means not connected. The coil generates a magnetic field when current (I) pass through it and closes the switch (i.e. top contact gets connected). A spring is used to pull back the switch open, when power is removed from the coil. Figure 2 shows the basic circuit for a normally opened relay operation while Fig. 3 shows the diagram of normally closed relay which operates in the opposite form of normally opened electromechanical relay [16].

Circuit diagram of normally opened

Diagram of normally closed electromechanical relay.
Apart from electromechanical relays, modern power system network use SSR [17]. In this study three types of SSR are discussed: Reed Relay Coupled SSR showed in Fig. 4, Transformer Coupled SSR shown in Fig. 5, and Photo Coupled SSR shown in Fig. 6. The use of solid state protective relay type was adopted in this work due to its numerous advantages over other types of protective relays. These benefits are not limited to the following [18,19,20]
-
high degree of reliability;
-
long operational life;
-
zero-voltage turn-on, low electro-magnetic induction;
-
shock and vibration resistant;
-
no contact bounce which leads to arc less switching;
-
microprocessor compatible;
-
fast response;
-
no effect of gravity or vibration or shock.
Sometimes, these relays use microprocessor but cannot be called microprocessor relays as it lacks the attribute of digital/numeric relay. These relays use semiconductor devices like diodes, SCR, TRIAC, Power transistor etc. to conduct load current. Relatively low control circuit energy is required to perform switching of the output state from OFF to ON position since semiconductor devices are used. To protect the circuit under control for introduction of electrical noises, the static relays are often used. Static relays are highly reliable and have a long life. It does not have any moving parts or contact bounce and thus have a fast response [18]. The classification of SSR by the nature of the input circuit is as follows [19].
-
a.
Reed Relay coupled SSR application of control signal occurs on the coil of the reed relay. Thyristor switch is triggered when the appropriate circuitry is activated upon closing of reed switch as shown in Fig. 5.
Fig. 4. 
Reed Relay Coupled SSR
-
b.
Transformer coupled SSR has a low-power transformer primary consisting of the control signal. The thyristor switch is triggered by the secondary that is generated by the primary excitation as shown in Fig. 5.
Fig. 5. 
Transformer Coupled SSR
-
c.
Photo Coupled SSR as shown in Fig. 6, a light or infrared source (generally LED) consist of the control signal, photo-sensitive semi-conductor device (diode, transistor or thyristor) detects the radiation from that source and generates an output. This output triggers the TRIAC which is used to switch the load current. The electrical isolation is excellent as the input and output path are coupled only by a beam of light.
Fig. 6. 
Photo Coupled SSR



3 Design Method
This study has five distinct units which include the power supply unit, the voltage sensing unit, the current sensing unit, the switching unit and the output unit as shown in Fig. 7. The materials used to actualize this project include the following: dc power supply, diodes, capacitors, resistors, transistors, solid-state relay, operational amplifier (LM324), NOT gate, light emitting diodes (LEDs), voltage regulator, current transformer, lamp; variable resistors, and casing.

Block diagram of the protection system using SSR.
3.1 The Power Supply Unit
This serves as input unit to the system. In this unit, power is converted from ac to dc and filtered as shown in Fig. 8.

Power supply unit.
3.2 The Voltage Sensing Unit
The voltage sensing unit shown in Fig. 9 consists of a voltage regulator (IC1), comparator (IC2), resistor (R3, R4, R5, R6 and R7), NOT gate and a light emitting diode. The circuit operates by stabilizing the rectified voltages 12 V dc with the help of voltage regulator. The resistors used to form the voltage dividers include (R3, R4, R6 and R7). The resistor R5, function as a limiting current resistor to the Not gate. The reduced voltages are compared through the inverting and the non-inverting inputs of the comparators. During the process, when the voltage in the non-inverting input is greater than the inverting, input the output of the comparator (IC2) becomes “high” (logic 1). But in a situation where the voltage in the inverting inputs is greater or equal to the non-inverting inputs, the output will become “low” (logic 0), and the LED in series with the NOT gate will come on indicating that there is no output from the comparator.

Circuit diagram of the voltage sensing unit.
3.3 The Current Sensing Unit
The current sensing unit shown in Fig. 11 consists of current transformer, rectification diodes, filtering capacitors, resistor and a comparator (LM324N). The main function of this unit is to covert current to voltage. It monitors the current flowing through the conductor from the mains input to the output and then compares it with a pre-calibrated value (30 A). This unit monitors the current passing through the conductor to the output and coverts it into voltage, the ac voltage is then rectified with a full wave diode rectification using IN007. The direct current (dc) voltage is then divided using one fixed and one variable resistor, this is to make it possible to recalibrate the current sensor. The output from the voltage divider is then passed through the non-inverting input of a comparator that has a reference voltage set to 6 V dc, when the non-inverting input of the comparator (LM 324 N) is greater than the inverting input, the system gives an output of 12 V dc.

Current sensing unit circuit diagram.
3.4 The Switching Unit
The switching unit of Fig. 11 is responsible for the making and breaking states of the relay. Transistors are used to drive the solid-state relays in this unit. The unit consists of an NPN transistor (Q1), resistors, and the solid-state relay. Transistor (Q1) conducts when its base senses voltage. This transistor is used to activate the collector current to the quantity required by the solid-state relay.

Circuit diagram of the switching unit.
3.5 The Output Unit
The output unit of the protective system is used to determine the output state of the SSR during over voltage, under voltage, over current or short circuit fault conditions.
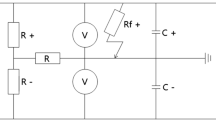
3.6 Designed System Analysis
The circuit diagram shown in Fig. 12 has four operational amplifiers that are configured as comparators. In Fig. 12, power is supplied to the VCC (terminal 4) of the operational amplifier. The first operational amplifier (voltage sensing unit) compares voltages between pins 3 and 2 of the operational amplifier. The non-inverting terminal pin 3 is set to a reference voltage of 6Vdc, terminal 1 gives output only when pin 3 is higher than pin 2. The 10 kΩ variable resistor in Fig. 9 is used to set the voltage between pin 2 and pin 3, such that pin 3 is higher than pin 2. The output signal from the comparator biases the second operational amplifier through 2.2 kΩ resistor which limits the flow of current to the second operational amplifier which is also configured to act as a comparator. The second operational amplifier compares the voltage between pin 12 and pin 13. Pin 12 acts as the reference voltage, the operational amplifier gives output when pin 12 is greater than pin 13. The output through pin 14 sends signal to the base of the transistor Q1 TIP36 of Fig. 11.

Internal structure of LM324N.
The TIP36 transistor of Fig. 11 was configured as a switch, 1 kΩ resistor was used as the base resistor Rb and this limits the base current and hence limits voltage drop at the output of the transistor, which switches ON the SSR, the switching inter phase in this case opens and closes based on the signal from the SSR. When the voltage at pin 2 is higher than that at pin 3, the output signal will be zero, then the NOT gate will trigger the LED (yellow) ON. This shows there is no output from the operational amplifier, which shows that there is over voltage and the SSR will cut off the load. Furthermore, the current transformer of Fig. 10 takes in current (30 A maximum) into its input (primary) from the supply (mains), and gives equivalent stepped down voltage (12 V) at the output (secondary), the 12 V AC is rectified using a full wave bridge rectifier and it’s then filtered. The output of the filter circuit is fed into the third operational amplifier which also acts as a comparator (current sensing unit) compares voltages between pin 5 and pin 6 of the operational amplifier. The non-inverting terminal pin 6 was also set to a reference voltage of 6VDC, pin 7 gives output only when pin 5 is higher than pin 6. The 10 kΩ variable resistor is used to set voltage between pin 5 and pin 6, such that pin 5 is higher than pin 6. The output signal from the comparator biases the fourth operational amplifier which is also configured to act as a comparator which equally compares the voltage between pin 10 and pin 9 and gives output at pin 8 when pin 10 is higher than pin 9. The output signal is fed to the second operational amplifier which also compares the voltage from the current sensing unit and the reference voltage of the voltage sensing unit and gives output when the voltages are equal or the voltage from the current sensing unit is less. The output signal from the second operational amplifier flows through the 1 kΩ resistor to the TIP36 transistor, which then switch ON and OFF the solid-state relay, when there is over voltage, over current and/or short circuit, the switching inter phase is opened, hence the load is cut off by the solid-state relay. However, when the fault is cleared, the switching inter phase is closed, thus the solid-state relay triggers the load which makes the system to function normally again. The implemented of the protection system is shown as Fig. 13.

Diagram showing implementation of the protection system
4 Conclusion
Problem technique plays a fundamental role in guaranteeing the integrity and safe operation of any electrical energy system. The first protection system was based on electromechanical devices employing movable parts and in a later period of development, solid-state based devices with discrete components were introduced. Although both types of devices are still widely used in on-operation protection systems they are currently being replaced by microprocessor-based relays called digital relays. This paper provides the implementation of solid-state relays for enhancement of a perturbed power system protection. With the implementation of the digital technology on the disturbed system, line, transformer, generator of the system was protected to certain integration. The benefit achieved in using numerical relays in this study is accurate tripping and less tolerance display of fault parameters. Result of the study shows that solid-state relays are essential part of the power system and are responsible for the control of any overload voltage or current.
References
Mbunwe, M.J., Ogbuefi, U.C., Anyaka, B.O., Ayogu, C.C.: Protection of a disturbed electric network using solid state protection device. In: Lecture Notes in Engineering and Computer Science: Proceedings of The World Congress on Engineering and Computer Science 2018, WCECS 2018, San Francisco, USA, 23–25 October 2018, pp. 249–257 (2018)
Rao, S.: EHV-AC, HVDC Transmission and Distribution Engineering Theory, Practices and Solve Problems. Khanna Publishers, Delhi (2006)
Power System Protection-Wikipedia. https://en.wikipedia.org/wiki/Power-system_protection
Weedy, B.M.: Electric Power Systems, 5th edn. Wiley, Hoboken (2012)
Mason, C.R.: The Art and Science of Protective Relaying. General Electric, 20 April 2017
Protective Relay-Wikipedia. https://en.wikipedia.org/wiki/Protective_relay
Lundqvist, B.: 100 years of relay protection, the Swedish ABB relay History. ABB, 30 May 2017
Input interfacing circuits. http://www.electronics-tutorials.ws/io/io_5.htm
Rockefeller, G.D.: Fault protection with digital computer. IEEE Trans. Power Appar. Syst. 88(4), 438–461 (1969)
Bo, Z.Q., Jiang, F., Chen, Z., et al.: Transient based protection for power transmission systems. In: IEEE PES Winter Meeting, Singapore (2000)
Generator Protection. https://www.electrical4u.com/generator-protection
Transformer Protection and Transformer Faults. https://www.electrical4u.com/transformer-protection-and-transformer-fault
Busbar Protection and busbar differential protection scheme. https://www.electrical4u.com/busbar-protection
Protection of lines or feeder. https://www.electrical4u.com/protection-of-lines-or-feeder
Three phase solid state relays – POWERSEM. www.powersem.net
Anil Kumar Reddy, K, Sirisha, S.: A ZVS DC-DC converter with specific voltage gain for inverter operation used for 3-phase induction motor operation. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2(8) (2013)
Why the use solid state relays. www.crydom.com
Shannon, C.E.: A Symbolic Analysis of Relay and Switching Circuits. IEEE Press, Hoboken (1940)
Sullivan, K.R.: Understanding relays, autoshop101.com
Monseth, I.T., Robinson, P.H.: Relay Systems. McGraw-Hill Book Co., New York (1935)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Mbunwe, M.J., Anyaka, B.O., Ogbuefi, U.C. (2020). Solid-State Protection of a Perturbed Electric Power System Network. In: Ao, SI., Kim, H., Amouzegar, M. (eds) Transactions on Engineering Technologies. WCECS 2018. Springer, Singapore. https://doi.org/10.1007/978-981-15-6848-0_11
Download citation
DOI: https://doi.org/10.1007/978-981-15-6848-0_11
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-6847-3
Online ISBN: 978-981-15-6848-0
eBook Packages: Computer ScienceComputer Science (R0)