
Abstract
This paper presents control of hybrid energy storage system for electric vehicle using battery and ultracapacitor for effective power and energy support for an urban drive cycle. The mathematical vehicle model is developed in MATLAB/Simulink to obtain the tractive power and energy requirement for the urban drive cycle. This HESS system is implemented with a dual bidirectional DC-DC converter configuration with their individual control to integrate the battery and UC across a common DC link. A rule-based energy management strategy is formulated for sharing of the tractive power demand between the two sources by maintaining State of Charges within a desired limit. Experiments were carried out under various test conditions and the results were presented. A significant reduction in battery stress, especially during acceleration and sudden braking is observed due to the pulse power support from ultracapacitor.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The automotive industry is changing lanes toward electric vehicle (EV) and reshaping the transportation sector with zero-emission vehicles. The market share of EV is expected to cross 30% by 2030 [1]. Energy storage system (ESS) of EV is attracting considerable interest of researcher and industry. Of late, diverse research efforts on various topics of ESS are proliferating, which includes State of Charge (SoC) estimation, cell balancing and effective charging technique, etc. Energy sources provided in an EV have limitations due to cost and size. Currently, Lithium ion battery is the standard ESS in EV because of their high energy density and long life compared to other available storages [2,3,4]. However, the life span of battery mainly associated with the charging profile and frequent charging/discharging of battery has adverse impact on battery health. Moreover, when the battery is to provide the pulse power requirement which is very common in EVs during acceleration and to receive large powers during sudden braking are something which deteriorate the battery life in EVs. High energy density for sources would result in longer range while high power density defines a quick release of power, i.e., during acceleration, hill climbing, etc. Batteries which when discharged at high C rates to cater the inrush currents of electric motors can result in premature failure of the battery. Still, there is not a single source available with the dual requirement of high power and energy density characteristics [5, 6]. At the same time, source like ultracapacitor (UC) has a potential to handle the high current quite comfortably because of its high power density [2]. Majority of vehicle, ESS is designed for the power rather than energy with a power to energy ratio of 8:1 [7]. As on today, selection of the energy storage for EV is a compromise between energy and power density. Current technology provides the high power density battery, but at the cost of oversizing.
One of the promising solutions of meeting the power and energy demand is through hybrid energy storage system (HESS) with multiple sources. HESS has many variants, but all of them target to have interplay between power-efficient devices (quick response) with energy-efficient devices (slow response). Modern HESS is aimed to get increased capacity, quick charging/discharging capability, long life and low cost. For automotive applications, recent studies suggest that UC and Battery hybridization shows the significant improvement on the vehicle range [2, 6].
This paper proposes an EV power train with more viable energy storage system to meet the power requirement by using multiple sources. Besides high power density, UC has very low internal resistance so they are able to supply and absorb the peak/surge power quickly.
The aim of this work is to develop and control a HESS and validate its performance in a typical EV power requirement. The paper is segmented into three sections; with Sect. 1 briefing the overview of HESS and a review to identify a suitable topology for hybridization of battery and UC. Second section briefs the tractive power estimation with EV model and energy management technique for power sharing. Inferences and conclusion on the performance of the proposed HESS and its control are detailed in the final section.
2 Converter Configuration for HESS and Control
The literature reviews on HESS suggest several topologies [2, 6, 8] with multiple input ports to accommodate multiple energy sources. All these topologies share a common feature to combine a fast responding device like UC along with a slow responding source like battery and can be connected with or without converter. The passive topology presented in Fig. 1a is simple because of the absence of power electronics and control, at the same time a major setback is its limited control on the SoC of battery as well the UC. A generic suggestion presented in the literature to improve the control capability of multiple sources is by inclusion of suitable DC-DC converter(s) [2, 6]. A semi-active topology is one with one of the source interfaced through converter while the other is directly connected. Figure 1b depicts such a topology where battery is interfaced to DC bus via DC-DC converter while ultracapacitor is directly connected and vice versa in Fig. 1c.

These DC-DC converters help smoothen the battery current and hence reduce the stress on battery. The position of UC in Fig. 1b gives the inherent capability for this topology to provide the current spike during rapid acceleration. Simultaneously, the battery is decoupled from DC bus which prevents the high fluctuating charge/discharge currents to be handled by the battery. The limitation of this topology is that DC bus may be open to large variation due to direct connection of UC, which may burden the motor control. Yet another semi-active topology can be obtained by swapping the position of battery and UC as presented in Fig. 1c. But the shortcoming of this topology is serious as the battery is exposed to sharp variations on the motor side which may affect battery life. Usages of two DC-DC converters solve the problem of voltage matching between multiple sources. However, such cascaded topology suffers from reduced overall powertrain efficiency, because of the increased number of cascaded converters [8].
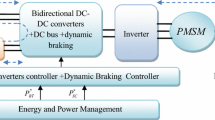
This paper proposes an active parallel converter configuration for better controllability as well as reliability over existing configurations. Enhanced control over the current delivered can be accomplished by independent converters for each source. The dual converter-based HESS selected for the proposed study is presented in Fig. 2, which uses two bidirectional converters for bidirectional power to flow for both sources. This provides the flexibility in control during both the propulsion and regeneration. Such regeneration is much talked in the literature to recuperate power during braking in the modern EVs. Usage of two separate converters increases the control complexity. However, it allows the use of low battery voltage, which eases the strict cell balancing requirements unlike high voltage batteries [6]. In addition, the use of two bidirectional converter allows independent control of both battery and ultracapacitor at its fullest range.

Dual converter-based HESS with battery and UC
3 System Description
The proposed HESS is presented in Fig. 3 which contains various modules including, converters and their controllers, the electric motor, the vehicle model, etc. A coordinated control of converters based on an energy management strategy (EMS) is proposed here.

Complete hybrid energy storage system with its control
EMS is an essential part of control of the overall system as the power demand is imposed by the vehicle drive cycle, whereas the power delivered by each source has to be controlled as constrained by their discharge capabilities. Furthermore, the motor is also to be controlled to meet the speed references as demanded by the driver command. Such a dual requirement of motor control and source control need a clear energy management considering all the setpoints as well as the constraints. Thus, in the present HESS an EMS is proposed utilizing the drive cycle information of a typical EV along with battery current limit control. These aforementioned requirements of the motor drive system with multiple energy sources of Fig. 3 are provided with three essential controllers and converters. Each source is connected to the common DC link through dedicated bidirectional converters with their respective controllers. The rule-based EMS is programmed to generate the reference for these two control loops. Another DC-DC converter is provided for the motor with a separate speed controller to track the drive cycle dictated reference speed.
3.1 Energy Management in HESS
As mentioned earlier, the EMS is the vital part of HESS, which decides the amount of power each source has to supply in order to meet the total tractive demand. A wide range of EMS were found in the literature which are broadly categorized into two groups, rule based [5] and optimization based [5].
The energy management control in the proposed work is implemented through distribution of power between battery and UC with a power ramp limiting technique. Higher rate of change of power is restricted from the battery considering its low power density. The Power ramp limiting approach is formulated as a rule-based method in the proposed work. The rule based is developed with the predefined battery parameters, viz. the C-Rating, Battery Capacity so as to reduce the battery stress.
Rule-Based EMS:
-
The rate of power drawn from battery is restricted to 1500 W/s till UC SoC is ≥40%
-
When UC SoC is <40% battery power rate is increased to 3000 W/s (to prevent the UC out of charge).
Once the power ramp limitation is entrusted on the battery controller, now the peak power will be delivered by the UC pack through yet another dedicated controller. In conclusion, this energy management technique will ensure that the UC supplies transient variation of the current and Battery supply the steady-state current. A pictorial representation of the power sharing with a controlled ramp rate is presented in Fig. 4.

Energy management strategy
However, an accurate value for power ramp threshold has to be defined for the battery controller. If this threshold is chosen as higher value, a rapid battery capacity reduction will occur due to high ramp discharge currents, while a smaller threshold value will make the UC run out of charge often. The power balance equation for the hybrid system is expressed as,
where \(P_{\text{Demand}}\) is tractive power, \(P_{B}\) is battery power and \(P_{\text{UC}}\) is UC power.
In the proposed work, the threshold is dynamically varied according to the SoC of UC. When UC SoC is <40%, then the threshold will be increased to keep the UC voltage and SoC within the limit, as they are linearly related [9].
3.2 Electric Vehicle Model for Tractive Power Estimation
A vehicle dynamics model is created in MATLAB, to estimate the required tractive power and energy from a standard drive cycle obtained from the United States Environmental Protection Agency [10], representing a typical city driving conditions. The vehicle dynamic model used in the present work considered the influence of several forces on a vehicle like rolling resistance, aerodynamic drag, etc. For the sake of simplicity, road gradient is not taken into account.
The drive cycle serves as the speed profile input to the vehicle model. For the present analysis, an Urban Dynamometer Driving Schedule (UDDS) is chosen. Although the complete drive cycle duration is 1369 s, a portion is selected from 160 to 320 s for the intended simulation studies. This time curtailment is as imposed by the simulation time limitations. The segment considered for the study is also shown in a magnified scale in Fig. 5. The drive cycle segment is so chosen as to include all the possible operating modes of a typical EV ranging from acceleration to braking and constant speed region. The mathematical vehicle model is developed by calculating the values of the forces acting on a moving vehicle and the step-by-step model development is presented using all the force equations.

UDDS drive cycle
Aerodynamics drag is the force of wind resistance opposite to the vehicle movement. It is basically the energy lost in order to counteract the air drag. The aerodynamic drag equation expressing the drag force, Fdrag is,
The rolling resistance, Froll, of any moving vehicle is the resistance occurred when wheels rotate on the road surface and is calculated as,
The vehicle acceleration force, Facceleration, is calculated as,
Thus, the total tractive force, Ftractive, can be calculated as,
And finally the tractive power requirement of the vehicle is calculated by multiplying the tractive force with the speed at which the vehicle is expected to operate,
The vehicle parameters used for tractive power calculation in the present work are shown in Table 1.
The complete vehicle model is developed in MATLAB/Simulink platform utilizing the equations from (2) to (6). The sizing of energy storage system is done according to the vehicle dynamic model and UDDS Cycle [11]. The tractive power as calculated using Eq. (6) is integrated with respect to time to obtain the required energy support for the vehicle, expressed as
So, a particular driving range has to be considered for the system verification and in the present work it is taken as 120 km. The drive cycle of Fig. 5 is repeated for 10 times to obtain the desired range of 120 km. Energy required for the 120 km range for the vehicle considered is arrived as 10.24 kWh. A 48 V battery with 213 Ah is selected with a 113 F ultracapacitor.
Two independent control loops are provided one each for two bidirectional DC-DC converters connecting each source to the common DC link. The generic control loop for controlling bidirectional converters is presented in Fig. 3. From the respective power references, a reference current is manipulated with the help of battery/UC voltage information. This reference current is compared with the actual current delivered by the battery/UC to result an error which is further compensated using a PI controller. The loop ends with a PWM generation signal at the selected switching frequency of the converter, utilizing the compensated error. The compensator gains are so selected to reduce the steady-state tracking error of the system.
4 Performance Characterization
The entire system of Fig. 3 with various subsystem specifications of Tables 1 and 2 is implemented in MATLAB/Simulink. The motor control block is not part of the present simulation study as the scope of this work is to realize the operation of power sharing by hybrid sources as dictated by a typical drive cycle.
The system is tested under various example drive cycles and the salient results are presented in Figs. 6 and 7. The drive cycle of Fig. 6a is converted as the tractive power reference of the system and shown in Fig. 6b. The total power delivered by both the sources is also presented in Fig. 6b whereas the individual powers delivered by the two sources are shown in Fig. 6c. Time correlation between Figs. 6b, c makes it evident that the higher rate of change of power is supported by UC while battery is witnessed to supply only the steady power demand.

a Drive cycle b tractive power requirement and total power delivered by the HESS c power delivered by the individual sources

a UC SOC b UC current c UC voltage d battery SOC e battery current f battery voltage
For instance, at 36 s load profile demands a total tractive power of 29.93 kW and UC is observed to deliver 20.34 kW while the battery delivers 8.63 kW which is the total minus the UC power. It is observed that the total power delivered by the two sources of Fig. 6b closely follows the tractive power reference of Fig. 6b, which proves the effectiveness of the proposed EMS and the accuracy of the converter control loops. Further at 118 s tractive load demand is found to be 26.94 kW and the UC is found to supply only 2.18 kW, while the battery contributes a major share of 24.76 kW power as seen from Fig. 6a–c. The reason being ascertained from Fig. 7a as the low SoC of UC at the given instant, this once again proves the merit of the proposed EMS. The SoC of UC is restricted at 40%, as developed in the rule base of EMS by increasing the battery drawal limit. EMS is designed in such a way that regeneration power at all possible times will be dumped into UC, this evident from Fig. 6c by observing the deceleration periods. This can be reduced the frequent charging of the battery. Conversely, the battery is charged with regenerative power in the proximity of 150 s as the UC SoC is close to 80% as seen in Fig. 7a. The actual load current is supplied by the combined support of battery and UC, battery stress is greatly reduced as sharp variations in load current are supplied by the fast dynamics of UC. The battery quantities are presented in Fig. 7d–f, wherein a rise in SoC can be observed after 150 s owing to the declining drive cycle resulting regeneration.
The sharp variation is UC SoC fortifies that only pulse power has been supplied by UC as seen from Fig. 7a. Power limiting technique is found effective in preventing the transient current drawn from battery under all the operating conditions. It also ensures the sharp regeneration power being pushed into UC during braking. The faster rate of change of UC SoC indicates its higher utilization as a result of the effective EMS and control. Furthermore, the battery and UC currents are in good compliance with their respective reference current trajectories.
5 Conclusion
Hybrid energy storage system to fulfill the power and energy needs of an EV is addressed through a rule-based EMS. Such energy management strategy has found effective in reducing the stress on the battery and provide extended period of operation and cycle life. The simulation results can be considered as a proof of concept for promoting hybridization of high energy batteries with high power UC for the future electric vehicles. A major concern of allowing the transient regenerative power if when recuperated and sent to the battery exhibits a major concern on its cycle life can now be resolved by this potential solution of dumping it into UC. In conclusion, the drive range extension is a much-awaited feature in a pure electric vehicle which is not too far with such hybrid energy storage systems.
References
Government finally wakes up: Sets a realistic goal of 30% electric vehicles by 2030 from existing 100% target—The Financial Express. https://www.financialexpress.com/auto/car-news/government-finally-wakes-up-sets-a-realistic-goal-of-30-electric-vehicles-by-2030-from-existing-100-target/1091075/
Khaligh A, Member S, Li Z, Member S (2010) Battery, ultracapacitor, fuel cell, and hybrid energy storage systems for electric, hybrid electric, fuel cell, and plug-in hybrid electric vehicles: state of the art. IEEE Trans Veh Technol 59:2806–2814
Bansal RC, Lukic SM, Emadi A, Cao J, Rodriguez F (2008) Energy storage systems for automotive applications. IEEE Trans Ind Electron
Abhin A, Chandrakala KRMV (2018) Hybrid energy storage system for an electric vehicle powered by brushless DC motor. In: 2018 International Conference on Control, Power, Communication and Computing Technologies (ICCPCCT), pp 497–501
Liu J (2018) Recent advance of hybrid energy storage systems for electrified vehicles. In: 2018 14th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), pp 1–2
Chemali E, Preindl M, Malysz P, Emadi A (2016) Electrochemical and electrostatic energy storage and management systems for electric drive vehicles: state-of-the-art review and future trends. IEEE J Emerg Sel Top Power Electron 4:1117–1134
Miller JM, Bohn T, Dougherty TJ (2009) Why hybridization of energy storage is essential for future hybrid, plug-in and battery electric vehicles. 2009 IEEE Energy Convers Congr Expo 2614–2620
Michalczuk M, Grzesiak LM, Ufnalski B (2013) Hybridization of the lithium energy storage for an urban electric vehicle. Bull Polish Acad Sci Tech Sci 61
Languang L, Yuping Y, He Y (2010) Characterization, analysis and modeling of an ultracapacitor. World Electr Veh J 4:358–369
US EPA, OAR O Dynamometer drive schedules. https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules
Bindu R, Thale S (2018) Sizing of hybrid energy storage system and propulsion unit for electric vehicle. In: 2017 IEEE transportation electrification conference, ITEC-India 2017
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Rajesh, Vijayakumari, A. (2020). Hybrid Energy Storage System for Electric Vehicle Using Battery and Ultracapacitor. In: Sengodan, T., Murugappan, M., Misra, S. (eds) Advances in Electrical and Computer Technologies. Lecture Notes in Electrical Engineering, vol 672. Springer, Singapore. https://doi.org/10.1007/978-981-15-5558-9_102
Download citation
DOI: https://doi.org/10.1007/978-981-15-5558-9_102
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5557-2
Online ISBN: 978-981-15-5558-9
eBook Packages: Computer ScienceComputer Science (R0)