
Abstract
This paper deals with power quality profile improvement of fuel cell (FC)-based distributed generation (DG) system using unified power quality conditioner (UPQC). Despite of the several benefits of DG like excellent energy supply, reducing expansion of power distribution system, environmental friendly, and so on, there are several challenges existing due to the integration of DG with the grid or operating it in stand-alone mode. Power quality (PQ) issue is one of the main technical challenges in DG power system. In order to provide improved PQ of energy supply, it is necessary to analyze the harmonics distortion of the system as well as the voltage sag and swell. The UPQC has been extensively useful and it is verified to be the best solution to diminish this PQ issue. This paper explores the detail of PQ impacts in FC-based DG system operating in stand-alone mode. The voltage sag compensation with current and voltage harmonics are estimated at varying load conditions by using control modified synchronous reference frame (MSRF) technique. The proposed model is developed in MATLAB/SIMULINK® and the result obtained validates the superiority of proposed technique over others in terms of harmonics elimination and sag compensation.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Distributed generation (DG) can be represented as a small-scale power system that contains loads, energy sources, energy storage units, and control and protection systems [1]. Using DG is more attractive as it improves the system quality, decreases the carbon emission, and reduces the losses in transmission and distribution systems [2]. The control of active and reactive power is easy, when DG connected to grid rather that standalone system. However, under autonomous operation, the DG is disconnected from the utility grid and operates in islanded condition. Usually, a stand-alone DG system is used to supply power to isolated areas or places interconnected to a weak grid. The application of above DG, on other hand, reduces the probability of energy supply scarcity. The proposed DG consists of a fuel cell (FC) along with controllable loads [3, 4]. The FC is the mostly developed energy source used now [5]. However, electric power system is mostly affected by nonlinear loads, mostly arc furnaces, power electronics converters, and house hold electronic equipment plays a key role in polluting the supply voltages and currents. The increase of power electronics-based equipment in household appliances and industries are the main cause of pollution of power system [6]. The research in the area of power electronics makes sure that unified power quality conditioner (UPQC) plays a vital role for achieving superior power quality levels.
In the present scenario, the series active power filters (APFs) and shunt APF, normally termed as SAPF, alone do not meet the requirement for compensating the PQ distortions. A UPQC consists of two inverter integrated with the DC-link capacitor where the series APF is integrated though a series transformer and the shunt is through interfacing inductor. The series inverter acts as a voltage source where as the shunt one acts as a current source. Simultaneous compensation of voltage and current-related PQ distortions using UPQC is achieved by proper controlling of series APF and shunt APF. The shunt APF is employed for providing compensating currents to PCC for generation/absorption of reactive power and harmonics suppression. Moreover, the operation of SAPF depends on three main parts which are momentous in its design; these consist of the control method used for generation of reference current, technique used for switching pulses generation for the inverter, and the controller used for DC-link capacitor voltage regulation. Different control strategy explained in literature as follows. The use of SAPFs for current harmonic compensation typically in domestic, commercial, and industrial applications has explained in Montero et al. [7]. The experimental study and simulation design of a SAPF for harmonics and reactive power compensation are explained by Jain et al. [8]. The power balance theory for active and reactive power compensation has been developed by Singh et al. [9]. The instantaneous reactive power techniques of three phase shunt active filter for compensation of source current harmonics have been explained by Akagi et al. [13]. Sag is the most significant PQ problem faced by lots of industrial consumers. The control for such a case can be analyzed by protecting sensitive loads in order to preserve a load voltage without sudden phase shift [10]. Different control strategies for series APF are analyzed by Benachaiba et al. [11] with importance on the reimbursement of voltage sags with phase jump. Different control techniques to reimburse voltage sags with phase jump are also projected and compared by Jowder et al. [12]. To ensure stable operation and improve the system performance of DG in island mode, a comparative study of two different control techniques used in UPQC like reference current generation, i.e., synchronous reference frame (SRF) method and modified synchronous reference frame (MSRF) method in conjunction with pulse width modulation-based hysteresis band controller is proposed in this paper by using MATLAB simulation software. The PQ issues like voltage sag compensation, current, and voltage harmonics were analyzed both at linear and nonlinear loads.
2 Proposed System
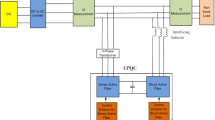
The projected DG system (comprising of solar and fuel cell-based energy sources) is shown in Fig. 1 where DG system generates DC power to the DC bus and by using a power inverter, this DC power is converted to AC. The AC bus delivers the power to the load which may be a linear or nonlinear. The UPQC is located in between the DG and nonlinear load manages the power quality of the system by using different control techniques.

Basic block diagram of DG with UPQC
2.1 Modeling of Fuel Cell System
Proton exchange membrane (PEM) fuel cell is considered as another energy source of the DG. The fuel cell consists of two electrodes, i.e., positive cathode, negative anode, and an electrolyte. The pressurized hydrogen gas enters the anode of the fuel cell and oxygen enters the cathode [14, 15]. The basic model of PEM FC is shown in Fig. 2 and its chemical reactions are given in Eqs. (1–3) [16].

Fuel cell model
The simulation fuel cell with boost converter is shown in Fig. 3 and the output voltage which is match with the output voltage of other DGs is shown in Fig. 4. Table 1 represents different parameters of fuel cell.

Fuel cell with boost converter

Output voltage of boost converter
3 Modeling of UPQC
This chapter begins with system configuration and detailed description on UPQC. The basic structure of UPQC is shown in Fig. 5 which consists of two inverter connected to a common dc-link capacitor. The series inverter is connected though a series transformer and the shunt inverter is connected in parallel with the point of common coupling. The series inverter acts as a voltage source where as the shunt one acts as a current source. The main function of UPQC is to control the power flow and reduce the harmonics distortion both in voltage and current waveforms.

Basic UPQC system block diagram
The series APF topology is shown in Fig. 6. The series APF protects load from the utility side disturbances. In case of series APF, Park’s transformation method is used for generation of unit vector signal. A PWM generator, generating synchronized switching pulses, is given to the six switches of the series converter.

Block diagram of series APF
Figure 7 shows the basic structure of shunt active filter. The shunt active power filter injects compensating current to the PCC such that the load current becomes harmonics free. The SAPF generates compensating current which is in opposition to the harmonic current generated by nonlinear load. This compensating current cancel out the current harmonics caused and makes the load current sinusoidal. So, the SAPF is used to eradicate current harmonics and reimburse reactive power at the source side so as to make load current harmonics free.

Block diagram of shunt active filter
Equations 4 and 5 show instantaneous current and the source voltage.
Fourier series method is used for expressing the nonlinear load current as shown in Eq. 6.
The ic is expressed by
Hence, for the exact compensation of reactive power and harmonics, it is essential to determine \(I_{s} \left( t \right)\). The instantaneous value of source, load, and compensation current can be expressed by, \(I_{s} \left( t \right)\), \(I_{L} \left( t \right)\), and \(I_{C} \left( t \right)\) where \(V_{s} \left( t \right)\) and \(V_{m}\) correspond to instantaneous value and peak value of source voltage.
3.1 UPQC Design
The MSRF controller scheme works in steady state as well as in dynamic condition exquisitely to manage the active, reactive power, and reduce the harmonics in load current. The literature in review reveals that MSRF technique has much more advantages as compare to SRF scheme, so the authors have selected this control scheme for UPQC operation. The control scheme not uses the PLL circuit as used by SRF scheme, which makes the system more compatible and may be operated in load changing condition. The MSRF scheme with its control algorithm is given below.
3.1.1 MSRF Scheme
Figure 8 shows the block diagram of modified SRF method for unit vector generation. The unit vector is generated by vector orientation method and not by PLL. Figure 9 shows the block diagram to generate unit vector by sensing the supply voltage.

Block diagram of modified SRF method

Unit vector generation block diagram
3.1.2 HCC Technique
Figure 10 shows the block diagram of hysteresis current regulator which generates the required pulses for inverter. In the current regulator, the error signal is generated by comparing the reference current I *sa and actual current Isa.

Hysteresis current controller scheme
The switching pulses required for the inverter is designed in such a way that when the error signal go beyond the upper band of hysteresis loop, the lower switches of inverter are ON and upper switches are OFF and similarly, the upper switches are ON and lower switches OFF when the error signal exceeds the lower band [17, 18]. So, the actual current is always tracked with respect to reference current inside the hysteresis band.
4 Results and Discussion
Performance analysis of DG connected to nonlinear load with MSRF-based UPQC
In this case, the system performance is analyzed by connecting nonlinear load with the DG system first without UPQC and then with MSRF-based UPQC. The performance of series APF can be evaluated by introducing voltage sag into the system. The profile of load voltage shown in Fig. 11a conforms that voltage sag is introduce from 0.1 to 0.3 s of the load voltage waveform. For sag condition, the series APF detects the voltage drop and injects the required voltage through the series coupling transformer. It maintains the rated voltage across the load terminal. In order to compensate the load voltage sag, UPQC (employing MSRF scheme) is turned on, which injects compensating voltage at the PCC as displayed in Fig. 11b as a result, the load voltage is same as that of source voltage. The load voltage after compensation is shown in Fig. 11c. In general, the operation of the series part of the UPQC can be described as rapid detection of voltage variations at source and it injects the compensation voltage which maintains rated voltage across the load terminal.

Profile obtained under (sag compensation). a Load voltage before compensation. b Compensating voltage injected by UPQC. c Load voltage after compensation
The shunt VSI in the UPQC is realized as shunt APF and is applied to solve the current-related PQ distortions, current harmonic distortion, reactive power demand, etc. In order to investigate the performance of shunt APF, a rectifier-based nonlinear load is introduced into the system and the level of harmonics is checked. It is observed from Fig. 12a that the source current waveform has a total harmonic distortion (THD) of 16.60% as per the FFT analysis of the source current shown in Fig. 12b. In order to make source current to be sinusoidal, the shunt APF of the UPQC with conventional MSRF technique is turned on at t = 0.1 s which injects compensating current as displayed in Fig. 12c. Hence, the THD level comes down to 2.54% as shown in Fig. 12d.

Profile obtained under (harmonics mitigation). a Source current before compensation. b Harmonics content before compensation. c Compensating current injected by UPQC. d Harmonics content after compensation
5 Conclusion
The research reveals that MSRF technique of UPQC makes possible for improving the power quality of a DG system connected with nonlinear load. The advantage of MSRF technique is that the production of sine and cosine angles for synchronization purpose instead of using PLL circuit, it uses a basic unit vector generation scheme. The suggested method delivers superior output than the existing method in terms of harmonic mitigation and compensation of active and reactive powers.
References
Badoni, M., Singh, B., Singh, A.: Implementation of echo-state network-based control for power quality improvement. IEEE Trans. Industr. Electron. 64(7), 5576–5584 (2017)
Mahmoud, M.S., Rahman, M.S.U., Fouad, M.S.: Review of microgrid architectures–a system of systems perspective. IET Renew. Power Gener. 9(8), 1064–1078 (2015)
Samal, S., Hota, P.K.: Design and analysis of solar PV-fuel cell and wind energy based microgrid system for power quality improvement. Cogent Eng. 4(1), 1402453 (2017)
Suresh, M., Patnaik, S.S., Suresh, Y., Panda, A.K.: Comparison of two compensation control strategies for shunt active power filter in three-phase four-wire system. In: Innovative Smart Grid Technologies (ISGT), IEEE PES, pp. 1–6 (2011)
Tang, Y., Loh, P.C., Wang, P., Choo, F.H., Gao, F., Blaabjerg, F.: Generalized design of high performance shunt active power filter with output LCL filter. IEEE Trans. Industr. Electron. 59(3), 1443–1452 (2012)
Hosseinpour, M., Yazdian, A., Mohamadian, M., Kazempour, J.: Desing and simulation of UPQC to improve power quality and transfer wind energy to grid. J. Appl. Sci. 8(21), 3770–3782 (2008)
Montero, M.I.M., Cadaval, E.R., Gonzalez, F.B.: Comparison of control strategies for shunt active power filters in three-phase four-wire systems. IEEE Trans. Power Electron. 22(1), 229–236 (2007)
Jain, S.K., Agarwal, P., Gupta, H.O.: Simulation and experimental investigations on a shunt active power filter for harmonics and reactive power compensation. IETE Techn. Rev. 20(6), 481–492 (2003)
Singh, B.N., Singh, B., Chandra, A., Al-Haddad, K.: Design and digital implementation of active filter with power balance theory. IEE Proc. Electr. Power Appl. 152(5), 1149–1160 (2005)
Dixon, J.W., Venegas, G., Moran, L.A.: A series active power filter based on a sinusoidal current-controlled voltage-source inverter. IEEE Trans. Industr. Electron. 44(5), 612–620 (1997)
Ferdi, B., Benachaiba, C., Dib, S., Dehini, R.: Adaptive PI control of dynamic voltage restorer using fuzzy logic. J. Electr. Eng. Theor. Appl. 1(3) (2010)
Jowder, F.A.L.: Design and analysis of dynamic voltage restorer for deep voltage sag and harmonic compensation. IET Gener. Transm. Distrib. 3(6), 547–560 (2009)
Akagi, H., Kanazawa, Y., Nabae, A.: Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Industr. Electron. Appl. 20(3), 625–630 (1984)
Noroozian, R., Abedi, M., Gharehpetian, G.B., Bayat, A.: On-grid and off-grid operation of multi-input single-output DC/DC converter based fuel cell generation system. In: Electrical Engineering (ICEE), 18th Iranian conference, pp. 753–758 (2010)
Nergaard, T.A., Ferrell, J.F., Leslie, L.G., Lai, J.S.: Design considerations for a 48 V fuel cell to split single phase inverter system with ultra-capacitor energy storage. In: Power Electronics Specialists Conference, Pesc 02, vol. 4, pp. 2007–2012 (2002)
Bucci, G., Ciancetta, F., Fiorucci, E, Vegliò, F.: An experimental approach to the modeling of PEM fuel cells in dynamic conditions. In: Power Tech, pp. 1094–1099 (2007)
Bose, B.K.: An adaptive hysteresis-band current control technique of a voltage-fed PWM inverter for machine drive system. IEEE Trans. Industr. Electron. 37(5), 402–408 (1990)
Karuppanan, P., Mahapatra, K.K.: A novel control strategy based shunt APLC for power quality improvements. In: IEEE International Conference on Power, Control and Embedded Systems (ICPCES), pp. 1–6 (2010)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Samal, S., Jena, T., Barik, P.K. (2020). Power Quality Improvement of a Fuel Cell-Based Distributed Generation System Using Unified Power Quality Conditioner. In: Pradhan, G., Morris, S., Nayak, N. (eds) Advances in Electrical Control and Signal Systems. Lecture Notes in Electrical Engineering, vol 665. Springer, Singapore. https://doi.org/10.1007/978-981-15-5262-5_15
Download citation
DOI: https://doi.org/10.1007/978-981-15-5262-5_15
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5261-8
Online ISBN: 978-981-15-5262-5
eBook Packages: EngineeringEngineering (R0)