
Abstract
Photovoltaic solar panels generate direct electricity from solar energy which involves physical and chemical changes. The current–voltage rating and the performance of the photovoltaic(PV) array modules considerably change with respect to lighting, temperature and the change of load conditions, time of day, amount of solar insolation, direction, orientation of modules, shading, and geographic location. These modules at one specific voltage, current, or wattage operate efficiently. This variation in output power will lead to loss of power efficiency and poor performance of the system. This paper implements a maximum power point tracking (MPPT) technique using buck–boost converters for PV arrays to increase the output power efficiency in real time. An incremental conductance algorithm is employed to implement the MPPT technique which makes the system more accurate and simpler to implement. Integral controllers are also used to make the maximum power tracking less error-prone. Simulations of this system are done using MATLAB and SIMULINK.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Photovoltaic cells are device modules that convert directly solar energy into electrical energy. As solar energy is the renewable source of energy, it is most advantageous to drive as a power source. Once installed, these produce no pollution to the environment. Efficiency of PV panels is extensively affected by certain factors such as climatic shade, orientation, the intensity of illumination, and temperature. Unless an ideal solar cell, it is impossible to achieve 100% efficiency. About 55% efficiency can be achieved when a sun tracking system is implemented. There are ongoing efforts and research made in regard to counteract the inefficiency of PV arrays [3]. MPPT technique enhances the efficiency of the PV arrays by 30% which can be further cascaded with solar modules [1]. Results reveal that a significant amount of power is wasted when a non-MPPT scheme is introduced. According to measured data, 81.56% average power is achieved compared to the non-MPPT technique which is 11.4%. Moreover, the result shows that MPPT is more efficient than non-MPPT which is about 86.02% according to average output power [2]. In [2], the comparison of systems with and without MPPT is proposed extensively. Here, we are going to implement the MPPT technique, which can be added in combination with PV modules.
Different algorithms have been developed to implement MPPT techniques [2]. Detailed work has been proposed to compare and analyze these algorithms. Out of all the algorithms developed, perturb and observe and incremental conductance algorithms are widely used [4]. P&O algorithm considers the swift change in irradiation level as a change in MPP due to perturbation and correspondingly changes the MPPT which eventually results in calculation error of the system. To overcome the anomalous calculation, an incremental conductance algorithm is much preferred. A proposal has been made to stimulate and provide a detailed analysis of MPPT techniques implemented through an incremental conductance algorithm [5]. The efficiency of the system is further increased by connecting an integral controller. In this paper, a proposal has been made to simulate efficient MPPT technique using integral controller and incremental conductance algorithm which can be employed in various applications like storage and transmission of power in gridlines. All the results are supported using MATLAB and SIMULINK. In further sections, there are simulations and analyses of our proposed approach toward the implementation of MPPT techniques for PV arrays. In the following section, the detailed analysis is mentioned about the design of the complete photovoltaic system.
2 Photovoltaic System
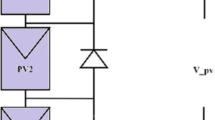
The proposed photovoltaic system is designed to get the maximum output power efficiency from the PV arrays before supplying it to the load. Figure 1 shows the block diagram of the system consists of important components like photovoltaic (PV) arrays, buck–boost converters, incremental conductance algorithm block, integral controller, and PWM generator.

Block diagram of a proposed PV system
The PV arrays change their output characteristics when there are variations in temperature and irradiation values [2]. The V and I blocks act as voltage and current sensors which calculate and feed the output to the incremental conductance block. Incremental conductance being an MPPT algorithm tracks the maximum power point. The output of this block is fed to integral controllers [13], which calculates the error in output voltage and incremental conductance output. The PWM generator is further controlled by the integral controllers. The output of the PWM is given to the buck–boost converters by varying the duty cycle of the PWM generated. Finally, the buck–boost converter increases or decreases the voltage of the PV array accordingly to maximum power output.
2.1 Photovoltaic Arrays
PV arrays are composed of smaller photovoltaic cells arranged in different configurations to achieve better voltages or better current output. These configurations are either series or parallel connections of the cells. A basic PV cell is generally a photodiode whose output current is dependent on both radiation levels and temperature changes. The temperature dependence of the photovoltaic cell on the current is given by the formula:
where e is the electronic charge (C), A is the area of the channel, D is the diffusivity of minority carriers, L is the diffusion length, and ND is the doping level. The intrinsic carrier (ni) is further dependent on temperature which results in corresponding change in the output current. Open-circuit voltage is also dependent on temperature and is given by the formula:
where k is Boltzmann’s constant, VGO is the band gap voltage, B and \(\gamma\) re constants. Differentiating the above equation proves that the voltage of the PV array is inversely proportional to the temperature of the PV array system. For silicon-based photovoltaic cells, the rate of change of voltage is -2.2 mV per °C. In Fig. 2, temperature dependence of current and voltage is plotted in the top plot and the power voltage characteristics in the bottom plot. These graphs are plotted on SIMULINK using the PV array block with the model 1SOLTECH 1STH-215-P.

Output characteristics of PV arrays for different temperatures. At the top, current versus voltage plot and power versus voltage plot at the bottom
2.2 Buck–Boost Converters
Buck–boost converters widely come with two topologies, namely inverting and non-inverting buck–boost converters [12, 13]. These converters contain a semiconductor switch, inductor, capacitor, and diode. Diode is usually reverse biased, and this makes the output voltage to be inverted with respect to the input voltage. The switching frequency used in simulation is 50 kHz. Therefore, such converters are called inverting buck–boost converters. Figure 3 shows the circuit of inverting buck–boost converters.

Circuit of inverting buck–boost converter
2.3 Integral Controller
Integral controller produces an output which is proportional to the error of the system. Here, integral controller is fed with input which is the combination of the output from the buck–boost converter and incremental conductance. It compares the output current and voltage from the buck–boost converter and minimizes the steady-state error of the voltage and the current [6, 8]. The transfer function of the integral controller system is given by:
where KI is called the integral constant. Integral controllers are employed in this design so that the steady-state error of the system becomes very negligible and can improve the accuracy of the system on long runs. The integral constant used in the simulation is 200,000. Integral controllers when compared with other controllers provide better results with more accuracy and make the system more stable. The rise time of the controller is also very less. The output from the integral controller is fed to the PWM generator. Eventually, when duty cycle is varied, the buck–boost converters work as buck only or boost only converters to step down or step up the voltage, respectively.
2.4 Incremental Conductance Algorithm
Incremental conductance is the most widely used technique for maximum power point tracking (MPPT). This algorithm employs measurement of voltage and current coming out of the PV arrays [9, 10]. Implementation of incremental conductance algorithm requires a memory element since it uses the previously measured voltage and current. Figure 4 shows the flowchart of incremental conductance algorithm. The change in the voltage and current values is determined. These variations are used to further change the duty cycle of the PWM generated [7, 11]. If there is no change in current and voltage, the previous values are retained. If the change in current is positive, the duty cycle should be decreased [5]. When the change in current is negative, duty cycle must be increased. If the instantaneous change in conductance is equal to the conductance of the system, it is not necessary to change the duty cycle and the maximum power point is retained. Duty cycle is decreased if the instantaneous change in conductance is greater than the conductance of the system. Further, duty cycle is increased if the instantaneous change in conductance is lesser than the conductance of the system.

Flowchart of incremental conductance algorithm in SIMULINK state-flow model
3 System Performance And Analysis
Extensive simulations have been performed to implement the MPPT using incremental conductance algorithm. Various PV array modules are present in the SIMULINK. Out of these 1SOLTECH 1STH-215-P is used to design the system, and the specifications of this model are given in Table 1.
The input values to the PV array are irradiation values and the temperature values. To make the system nearer to the real-world application, irradiation and temperature values are considered in such a way that it depicts a day. Initially, the values are moderate which depicts the morning irradiation and temperate values. Later, it is increased to the maximum value which depicts the noon part of the day. Further, values are taken to a lower level which depicts the evening and dusk. Figs. 5 and 6 represent the irradiation and temperature values considered in the simulation of the system. The output voltage, current, and power of the PV array are graphically represented in Figs. 7, 8 and 9. All the graphs depicted have the time axis in seconds(s). Figure 5 has the y-axis illumination measured in lux(lx). Fig. 6 has the y-axis temperature measured in (̊C). Figs. 7 and 11 have the y-axis voltage measured in Volts(V). Figs. 8 and 12 have the y-axis current measured in Ampere(A). Figs. 9 and 13 have the y-axis power measured in Watts(W).

Irradiation values given to the PV Array

Temperature values given to the PV array

Output voltage of PV array without MPPT

Output current of PV array without MPPT

Output power of PV array without MPPT

SIMULINK model designed for MPPT technique

Output voltage after incremental conductance

Output current after incremental conductance

Output power after incremental conductance
Figs. 7, 8 and 9 depict the output parameters of the PV array without employing MPPT techniques for various values of irradiation and temperature. The different values of irradiance and temperature used in the simulation are given in Table 2.
The complete system of PV array with incremental conductance algorithm employed for MPPT technique shows the results tracking the maximum power at the output stage of the system. Fig. 10 shows the complete system designed in the SIMULINK. Further, the incremental conductance block is designed using a state flow model in SIMULINK. The output of the system after including incremental conductance algorithm and integral controllers has been depicted in Figs. 11 and 12. Fig. 11 represents the output voltage of the PV array while tracking the maximum power point through the different values of irradiance and temperature. Fig. 12 represents the output current of the PV array. Fig. 13 depicts the output power of the PV array.
A nominal voltage of 60 V is chosen so that the output voltage varies around this mark. Most of the applications like charging a battery or in gridlines require a constant voltage with a variable current. In case of charging a battery, the battery is rated to a voltage. Anything more than this voltage will lead to loss of power. In this paper, the output voltage is fixed, and the current can be varied. The assumed load is resistive in nature with resistance equal to 100 Ω. The output current can be furthered varied with different loads. The average power of the PV array before and after applying MPPT technique is same, whereas the instantaneous power values are different representing the tracking of maximum power point. The output voltage remains almost constant making it feasible for various applications. The maximum output power obtained with the resistive load is 42 W.
4 Conclusion
The complete simulation results of the PV system employing the incremental conductance algorithm and integral controllers prove that the system is more power efficient when compared with the normal output of the PV system. The output voltage is boosted, while the current is decreased making it useful for transmission of power through gridlines. The simulations are considered with some real-time values making it more efficient to be practically implemented. The output voltage remains almost constant with variations of atmospheric conditions making it feasible for various applications. However, accurate numerical values are not possible with the graphical simulations obtained. As a measure to this, a hardware can be developed to obtain accurate numerical values. These simulations are based on a resistive load at the output. Certain parameters will change based on the different loads used. A more robust model can be designed as further work.
References
Y. Dong, J. Ding, J. Huang, L. Xu, W. Dong, Investigation of PV inverter MPPT efficiency test platform. in International Conference on Renewable Power Generation (RPG 2015), (Beijing, 2015), pp. 1–4
D.K. Chy, M. Khaliluzzaman, Experimental assessment of PV arrays connected to buck-boost converter using MPPT and Non-MPPT technique by implementing in real time hardware. in 2015 International Conference on Advances in Electrical Engineering (ICAEE), (Dhaka, 2015), pp. 306–309
A.H.M. Nordin, A.M. Omar, Modeling and simulation of PHOTOVOLTAIC (PV) array and maximum power point tracker (MPPT) for grid-connected PV system. in 2011 3rd International Symposium & Exhibition in Sustainable Energy & Environment (ISESEE), (Melaka, 2011), pp. 114–119
D. Ryu, Y. Kim, H. Kim, Optimum MPPT control period for actual insolation condition. in 2018 IEEE International Telecommunications Energy Conference (INTELEC), (Turin, 2018), pp. 1–4
A. Saleh, K.S. Faiqotul Azmi, T. Hardianto, W. Hadi, Comparison of MPPT fuzzy logic controller based on perturb and observe (P&O) and incremental conductance (InC) algorithm on buck-boost converter. in 2018 2nd International Conference on Electrical Engineering and Informatics (ICon EEI), (Batam, Indonesia, 2018), pp. 154–158
J. Zhang, L. Li, D.G. Dorrell, Y. Guo, Modified PI controller with improved steady-state performance and comparison with PR controller on direct matrix converters. Chin. J. Electr. Eng. 5(1), 53–66 (2019)
K.S. Tey, S. Mekhilef, Modified incremental conductance MPPT algorithm to mitigate inaccurate responses under fast-changing solar irradiation level. Sol. Energy. 101, 333–342 (2014) https://doi.org/10.1016/j.solener.2014.01.003
S. Khatoon, Ibraheem, M.F. Jalil, Analysis of solar photovoltaic array under partial shading conditions for different array configurations, in 2014 Innovative Applications of Computational Intelligence on Power, Energy and Controls with their impact on Humanity (CIPECH), (Ghaziabad, 2014), pp. 452–456
T.M. Chung, H. Daniyal, M. Sulaiman, M. Bakar, Comparative study of P&O and modified incremental conductance algorithm in solar maximum power point tracking. in 4th IET Clean Energy and Technology Conference (CEAT 2016), (Kuala Lumpur, 2016), pp. 1–6
M.J. Hossain, B. Tiwari, I. Bhattacharya, An adaptive step size incremental conductance method for faster maximum power point tracking. in 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), (Portland, OR, 2016), pp. 3230–3233
M.H. Anowar,, P. Roy, A modified incremental conductance based photovoltaic MPPT charge controller. in 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), (Cox’sBazar, Bangladesh, 2019), pp. 1–5
D. Lakshmi, M.R. Rashmi, A modified incremental conductance algorithm for partially shaded PV array, in 2017 International Conference on Technological Advancements in Power and Energy (TAP Energy), (Kollam, 2017), pp. 1–6
S.N. Soheli, G. Sarowar, M.A. Hoque, M.S. Hasan, Design and analysis of a DC -DC buck boost converter to achieve high efficiency and low voltage gain by using buck boost topology into buck topology. in 2018 International Conference on Advancement in Electrical and Electronic Engineering (ICAEEE), (Gazipur, Bangladesh), 2018, pp. 1–4
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sumedha, D.S., Shreyas, R., Juthik, B.V., Miranda, M. (2021). Simulation and Analysis of the PV Arrays Connected to Buck–Boost Converters Using MPPT Technique by Implementing Incremental Conductance Algorithm and Integral Controller. In: Patnaik, S., Yang, XS., Sethi, I. (eds) Advances in Machine Learning and Computational Intelligence. Algorithms for Intelligent Systems. Springer, Singapore. https://doi.org/10.1007/978-981-15-5243-4_2
Download citation
DOI: https://doi.org/10.1007/978-981-15-5243-4_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5242-7
Online ISBN: 978-981-15-5243-4
eBook Packages: EngineeringEngineering (R0)