
Abstract
The facilitation of bulk power transmission and non-synchronized interconnection of alternating current (AC) grids convince engineers and researchers to explore high voltage direct current (HVDC) transmission system in a comprehensive way. This exploration focuses on control and protection of HVDC transmission system. Fault estimation is a core component of protection of HVDC transmission system. This is because of sudden built up of direct current (DC) fault. In this research, DC fault is estimated in multi terminal HVDC transmission system based on restricted Boltzmann machine. Restricted Boltzmann machine is a generative stochastic artificial neural network in which learning of probability distribution is conducted over the set of inputs. Three terminal HVDC transmission system is simulated under normal and faulty conditions to analyze variations in electrical parameters. These variations serve as learning parameters of restricted Boltzmann machine. Contrastive divergence algorithm is developed to train restricted Boltzmann machine. It is an approximate maximum likelihood learning algorithm in which gradient of difference of divergences is followed. It is found that fault is estimated with the testing of variations in minimum time steps. Simulation environment is built in Matlab/Simulink.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Multi terminal high voltage direct current (MT-HVDC) transmission system
- Restricted Boltzmann machine (RBM)
- Contrastive divergence algorithm (CDA)
- Fault estimation (FE)
- Direct current (DC) fault
1 Introduction
HVDC transmission system is gathering attention of engineers and investors because of its promising attitude towards bulk power transfer with the aim of improving the standards of living. In addition to this, HVDC transmission system is superior to conventional AC transmission system because of its low losses, ability to interconnect unsynchronized grids, minimum right of way, capability of transferring bulk power, and installation as submarine cables. Therefore, HVDC transmission is basically the renaissance of DC currents in the war of currents [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24].
Researches have been conducted passionately over the decades for development of methods of fault detection, classification and location in HVDC transmission lines. It is equally important along with the growing concept of smart grids to build an intelligent system of fault monitoring and diagnosis (FMD). Protection system must be capable of detecting, classifying and locating faults in a better way [23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41].
Detection, classification and finding location of faults in HVDC transmission are found to be the most blazing research areas in power system. This is entirely because of the intentions of interconnection of non-synchronized grids and bulk power transfer in a reliable fashion. Developments in digital signal processing techniques, artificial intelligence, global positioning system (GPS), communication and machine learning algorithms have opened doors for the researchers to carry out studies in a way so that the confinement associated with the traditional methods could be dealt and addressed successfully and effectively [24, 26, 28, 30,31,32,33,34,35,36,37,38,39,40,41].
When a DC fault occurs in HVDC transmission line, it grows rapidly and reaches a very high steady state value. Because of this sudden growth and higher steady state value, converter stations and equipment associated with HVDC transmission undergo severe danger of failures. In addition to this, this sudden growth and higher value of DC fault current are beyond the current interrupting and limiting capacity of conventional circuit breakers. Increase in DC fault current is required to be detected rapidly so that its effects could not be expanded to system. Therefore, in order to overcome this issue of DC fault, extensive studies are carried out over modified forms of relaying mechanisms. In short, there are basically two ways or strategies to counter DC fault current. In selective fault clearing strategy, only circuit breakers associated with the faulted line is used to interrupt fault current but in non-selective fault clearing strategy, fault current is interrupted by combined actions of multiple components such as the converters with the facilities of fault interrupting and limiting capability. Because of too much complexity in non-selective fault clearing strategy and fear of increasing capital expense of converter stations, it is practically not feasible to apply over large power systems [23, 24, 42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59].
DC fault at the terminals is detected by the rate of change of electrical parameters such as voltage and current. Sudden rise in current or sudden drop in voltage is a clear indication of origination of DC faults. Changes in voltage and currents are observed by optical transducers installed to measure these values. These values are converted to lower levels to make them applicable for relay sections. Relay senses them and prepares an action according to the rated capacity of flow of current or of voltage at terminals. This rate of change of voltage or current is compared with the threshold values of voltage or current to prepare a prompt action. When the fault is very closed to the converter stations or magnitude of fault is small, then this rate of change of voltage or current is not sufficient to prepare an interrupting action [42,43,44,45, 47, 55]. There must be additional techniques required to extract an in-depth knowledge available in these electrical parameters. This strikes an idea to implement analysis based on time and frequency domain. Fourier transform (FT) technique is applied to analyze the voltage and current signals in frequency domain [60,61,62,63,64,65,66,67]. Because of less information, wavelet transform (WT) technique is developed to observe time and frequency domain of electrical signals simultaneously. Fine analysis requires extensive computation in WT. In addition to this, although discrete WT is computationally efficient yet discretization involves reduction in efficiency of wavelets. Therefore, alternative techniques are taken into consideration or these techniques are supported with further advanced methods [47, 60,61,62,63,64,65,66,67,68,69,70,71,72,73,74].
Machine learning is an emerging approach for fault diagnosis in HVDC transmission lines. It is a technique in which information is acquired without the need of accurate programming. Hence, this reduces computational burden without questioning the accuracy and efficiency. Features are extracted from the voltage and current signals to prepare a testing and training data. In this way, algorithms are trained for a particular event so that they could respond to testing data accordingly [75,76,77,78,79,80,81,82,83,84]. In the literature, there are a vast number of machine learning algorithms. Broadly, they are classified into two techniques. Firstly, is the supervised learning, in which information is evaluated on the basis of available pre-defined tags. Secondly is the unsupervised learning in which unknown data (testing data) is evaluated without the existence of preset tags. Classification and regression are the examples of supervised learning. Clustering and association are the examples of unsupervised learning [85,86,87].
In this research, HVDC transmission line is simulated under normal and faulty conditions. Moreover, restricted Boltzmann machine learning (RBML) algorithm is developed and implemented. This algorithm is applied and tested for fault estimation in HVDC transmission lines. Matlab/Simulink is used for the simulation.
This research paper consists of following sections: Sect. 1 covers the introduction and literature review regarding fault estimation in HVDC transmission system. Section 2 consists of explanation of HVDC transmission system. Restricted Boltzmann machine is explained in Sect. 3. Contrastive divergence based learning approach of restricted Boltzmann machine is covered in Sect. 4. Steps involved in methodology of fault estimation in three terminal HVDC transmission system is added in Sect. 5. Section 6 contains simulation analysis of test model of three terminal HVDC transmission system. Conclusion is given in Sect. 7.
2 HVDC Transmission System
In high voltage direct current (HVDC) transmission system, direct current (DC) is used for transmission of bulk power. This transmission system possesses significantly low losses in the case of long distanced transmission but has an expensive infrastructure. This system is used as submarine cable transmission without taking into consideration of charging and discharging of capacitance of line in each cycle with heavy currents. In case of short distances, its high cost of deployment is justified because of numerous advantages of HVDC transmission system. Voltage range between 100 kV to 800 kV is usually utilized in HVDC system. In the end of 2019, a new voltage value of 1100 kV will be operational for HVDC system in China [2,3,4,5,6, 8, 9, 15, 18, 20, 23, 24].
Non synchronized alternating current (AC) transmission systems can be interconnected with HVDC transmission link. AC transmission systems working at different frequencies like at 50 Hz and 60 Hz can be integrated with help of HVDC link. Hence, stabilization can also be achieved with HVDC transmission systems in the case of incompatible networks. Control of HVDC link is independent of phase angle between load and source. This concept helps in stabilization of power networks against any disturbances resulted from the change in power [2, 20, 23, 24].
Practically, most of HVDC transmission technology deployed around the globe is the technology developed in 1930s in Sweden and in Germany. In 1951, commercial installation was made between Moscow and Kashira in Russia. In 1954, 100 kV and 20 MW system was installed between Gotland and Mainland Sweden. Rio Madeira link is the longest link established in Brazil consisting of two bipoles of ±600 kV, 3150 MW. Porto Velho in the Rondonia is connected to Sao Paulo Area with long DC link of 2,375 km. ABB group is going to build an ultra-high voltage direct current (UHVDC) land link of 1100 kV and 12 GW for a distance of 3000 km. It is going to be the largest DC link with the highest bulk power capacity [2,3,4,5,6, 18, 20].
The idea of transmission at high voltage is driven because of significant losses and reduction in the lives of equipment deployed in the case of transmission at high currents. High voltages are beneficial for long distance transmission. Because of AC generation systems, three phase AC voltages are converted to high DC voltages. Due to advancement in power electronics in 1970s, it is practically feasible to convert AC to DC and vice versa with the semiconductor components like thyristors, insulated gate bipolar transistors (IGBT), etc. Therefore, based on the semi-conductor technology, HVDC transmission system is broadly classified into two categories: First is Line Commutated Converter in which thyristor technology is deployed for conversion. External AC circuit is provided for turning off and on the thyristor. Second is the voltage source converter (VSC) in which IGBT based converter stations are developed. IGBT technology provides more variants than thyristor based technology. Multiple grid connections, effective controlling, renewable energy integration and self-commutation are the notable features of VSC based HVDC system. Recently, researchers are very much attracted towards development of VSC based HVDC system as an advantageous substitute of thyristor based HVDC system [2,3,4, 17,18,19,20,21,22]. Comparison of LCC - HVDC and VSC - HVDC transmission system is presented in Table 1.
2.1 VSC Based HVDC Transmission System
Self-commutating switches, e.g. gate turn-off thyristors (GTOs) or insulated gate bipolar transistors (IGBTs) are used in voltage source converters (VSC). These switches can be turned on or off in a controlled manner. High switching frequency based pulse width modulation is utilized in the operation of voltage source converters [23, 25, 27, 28, 31, 40, 47, 56, 58, 62, 64, 69, 78].
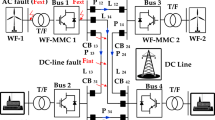
Typical configuration of VSC based HVDC system is presented in Fig. 1.

Typical three terminal VSC – HVDC transmission system
VSC-based HVDC transmission system is composed of two VSCs, transformers, phase reactors, ac filters, dc-link capacitors and dc cables [90,91,92,93].
VSCs are connected at the sending and receiving ends of transmission line. Both VSCs have same configuration. One of the VSCs works as a rectifier and the other VSC works as an inverter. Therefore, it can be said that these converters are back to back converters. Normally, transformers are used to connect AC system to converters. In addition to this, transformer also transforms the AC voltage level to DC voltage level. Three winding type transformers are usually deployed and configuration of transformer can be altered with respect to rated power and transformation requirement. Phase reactors act as current regulators for controlling the flow of active and reactive power. These phase reactors also work as AC filters to mitigate the effects of high frequency harmonic contents developed in AC currents because of the switching operation of IGBTs. Two equally sized capacitors are installed at the DC side of converter stations. Sizes of these capacitors are dependent on DC voltage. DC capacitors provide a low inductance path for the turned off current. These capacitors also act as energy storage components in order to control the flow of power. Moreover, these capacitors also decay down the voltage ripples on DC side. Harmonics are blocked by AC filters from entering the AC system. Insulation of DC cable used in VSC based HVDC system is composed of extruded polymer. This material is resistant to DC voltage. Mechanical strength, flexibility and low weight are the notable features of this polymer cable. AC side of VSC station works as a constant current source. Therefore, inductor is used as an energy storage component. Elimination of harmonics is required which is carried out by small AC filters. VSC acts as a constant voltage source on DC side of converter station. Therefore, capacitors are installed which work as energy storage components. In addition to this, these capacitors provide the facility of DC filters. High switching losses are associated with VSC based HVDC system. These losses are reduced by using commutation scheme of soft switching. Controlling of power is done in the same way in VSC based HVDC system as in the case of LCC based HVDC system. Active power is controlled at inverter side and DC voltage is controlled at rectifier station. Fast inner current control loop accompanied by several outer control loops makes the realization of control system of VSC based HVDC system [23, 24, 88, 92,93,94,95].
AC currents are controlled by rapid inner current control located at the base level of control system of VSC based HVDC system. Reference AC currents are obtained by outer controllers. These outer controllers are relatively slow and include DC voltage controller, AC voltage controller, Active power controller, reactive power controller and frequency controller. Reference of active current is obtained from DC voltage controller, active power controller or from frequency controller whereas, reference of reactive current can be extracted from reactive power controller or from AC power controller [24, 88,89,90, 96, 97].
3 Restricted Boltzmann Machine (RBM)
Deep belief networks (DBNs) was introduced by Hinton along with his team at University of Toronto in 2006. It was proposed with a learning algorithm. In DBNs, one layer is trained greedily at a time and unsupervised learning algorithm known as Restricted Boltzmann Machine (RBM) is exploited for each layer. Architectural depth of brain has been working as a source of motivation for neural network researchers to train deep multi-layer networks for decades. Machine learning model is built with multiple hidden layers. Layer feature transformation is applied for training samples layer, for training the samples in the feature space for representation of new features in another space in order to achieve desired results of experiment. Classification, regression, information retrieval, dimensionality reduction, modeling motion, modeling textures, object segmentation, robotics, natural language processing and collaborative filtering are the emerging examples solved by DBNs [98,99,100,101,102,103,104].
Restricted Boltzmann machine (RBM) is composed of two layers of units. One is visible unit represented by \( V = \left( {V_{1} , V_{2} , \ldots , V_{m} } \right) \) and other is hidden unit denoted by \( H = \left( {H_{1} , H_{2} , \ldots , H_{m} } \right) \). RBM is a probabilistic model in which hidden binary variables are utilized to model the distribution of variables of a visible layer as shown in Fig. 2.

Graphical representation of Restricted Boltzmann Machine with hidden and visible layers.
Observed data is represented by visible units. Relation between two observed variables is captured by hidden units. Since all the units are composed of binary variables,
Energy function of RBM is defined as:
Where \( \theta = \left\{ {w,a,b} \right\}, a = \{ a_{i} , i = i, 2, \ldots , n\} \;{\text{and}}\;b = \left\{ {b_{j} , j = 1, 2, \ldots ., m} \right\} \) are the biases term associated to visible and hidden units respectively. Conditional probability function is given as:
Where \( Z\left( \theta \right) \) is a partition function or normalization constant and it ensures the validity of probability distribution given as:
Likelihood function provides an information about how well the data summarizes these parameters and given as:
Training of restricted Boltzmann machine is done to evaluate the unknown parameters. The derivatives or gradient of log likelihood function with respect to model parameters θ is calculated to minimize the log likelihood function as:
Parameters \( w, a \) and \( b \) are calculated by finding the gradient of log likelihood function as:
4 Contrastive Divergence (CD) Algorithm
Contrastive divergence (CD) is an approximate maximum likelihood learning algorithm proposed by Geoffery Hinton. This algorithm follows the gradient of the differences of two divergences. This algorithm helps in reducing difficulty of computing log likelihood function.
Training of data is usually conducted by this CD algorithm in RBM [105, 106]. In this algorithm, sample for training, number of hidden layers, learning rate and maximum training cycle are specified and are taken as input. Outputs are usually weight w, bias of hidden layer b, bias of visible layer a. Weights are optimized to train product of expert models. Gibbs sampling is performed in this algorithm and is used inside a gradient descent procedure for the evaluation of weights. Visible layer is usually taken as initialization unit \( V_{1} = X \) in training. Minimum values of \( w, a \) and \( b \) are selected randomly.

In this research, classifier of RBM is constructed. In this classifier model, there are two layers. Lower layer is stacked by a number of layers of RBMs. Upper layer is added containing the desired output variable. This is the classification layer. In the top level units, softmax classifier outputs are used. It is a sample in which probability of different states are added and maximum probability of the state is classified. Proposed flow diagram of CD learning based RBM is shown in Fig. 3.

Contrastive Divergence Learning based Restricted Boltzmann Machine
5 Methodology
Following are the steps involved in the implementation of contrastive divergence learning based restricted Boltzmann machine for fault estimation in MT- HVDC transmission system.
5.1 Data Selection
Voltage and current samples are prepared based on the observations made at converter stations, working as rectifier or inverter, in VSC based HVDC transmission system. Voltage and current values are recorded before and after the occurrence of faults. This data is untagged and it can be employed as pertaining sample. Tuning is done by the application of small amount of tagged samples of current and voltage values recorded at converter stations of VSC based HVDC transmission system.
5.2 Characteristics of Selected Variables
Variables are selected as features of model’s input. These variables are basically DC value of the fault, its dominating frequency component and value of total harmonic distortion (THD). These variables depict the normal and faulty state of multi terminal HVDC transmission system. Contrastive divergence (CD) trains the Restricted Boltzmann machine (RBM) on the characteristics of these variables.
5.3 VSC Based HVDC System Status Codes
Fault estimation is basically a multi classification task. This diagnostic technique is divided into following categories based on fault type and fault distance.
-
1.
Pole to Ground Fault
-
2.
Pole to Pole Fault
-
3.
Pole to Pole and Ground Fault
-
4.
AC Fault
-
5.
Fault at Converter Station
-
6.
Fault at 50 km
-
7.
Fault at 100 km
-
8.
Fault at 200 km
In this research, fault distance and measurement points are employed for fault estimation in multi terminal HVDC transmission system.
5.4 Implementation of Fault Estimation Process
Sample and characteristics variables are selected. Classification model is built based on RBM in which training of untagged sample is done through contrastive divergence (CD) algorithm.
6 Simulation Results
Simulation environment is created in Matlab/Simulink. Three terminal VSC – HVDC model is developed as a test specimen. Parameters associated with this test model of VSC HVDC system is given in Table 2.
In this test system, there are basically three converter stations. One is rectifier (VSC – I) and two of them are inverters (VSC – II and VSC – III). The DC transmission cable between VSC – I and VSC – II is 200 km long. The DC transmission cable between VSC – I and VSC – III is 100 km long. This test system is simulated under healthy and faulty conditions to analyze it’s working as shown in Fig. 4. Figure 4(a) depicts the current of rectifier station under normal conditions. Values of current are graphically displayed against time. Current is reaching steady state value of 1.463 Amperes in less than 0.2 s. In the similar fashion, current attains a steady state value of 2.48 Amperes and 1.074 Amperes in minimum time at converter station II (inverter) and converter station III (inverter) as shown in Fig. 4 (b) and Fig. 4 (c) respectively. This depicts the achievement of stability of HVDC system in minimum possible time. All the converter stations are working under normal conditions. Figure 4 (d) depicts the variation in DC current measured at converter station I (rectifier) under DC fault on a line of 200 km long. Variations are quite visible under fault condition. DC current increases and is found to be of 1.629 Amperes. In the same way, DC current is measured at converter station II and is found to be of 2.334 Amperes as shown in Fig. 4 (e). As the fault occurs at 200 km (very closed to converter station II) from rectifier station, so no significant change in current is observed at converter station II. It is observed that a current decreases to 0.09625 Amperes at VSC – III which is a big variation as shown in Fig. 4 (f). This decrease in DC current is an indication that a neighboring line is under fault condition. When a fault occurs on DC transmission cable connected between VSC – I and VSC – III, increase in DC current is observed at converter station I as shown in Fig. 4 (g). Figure 4 (h) shows that no significant change is observed at converter station III because DC fault is very closed to it. However, decrease in DC current is found at converter station II which is an indication that the neighboring line is under fault as depicted in Fig. 4 (i). Table 3 summarizes the change in value of DC current with respect to different locations of fault and with respect to its measurement points.


This figure shows the following conditions. (a) Rectifier station current under normal conditions (b) Inverter station (VSC – I) current under normal conditions (c) Inverter station (VSC – II) current under normal conditions (d) Rectifier station current under DC fault conditions at VSC - II (e) Inverter station (VSC- II) current under DC fault condition at VSC - II (f) Inverter station (VSC – III) current under DC fault condition at VSC - II (g) Rectifier station current under DC fault condition at VSC - III (h) Inverter station (VSC – II) current under DC fault condition at VSC - III (i) Inverter station (VSC – III) current under DC fault condition at VSC – III.
Figure 5 depicts the variations in error vector with respect to change in time steps. It is found that error decreases with the increase in time steps. This error vector is obtained from the contrastive divergence learning of restricted Boltzmann machine (RBM). After training of RBM, this machine is tested under different conditions in a sample of 1000 time steps. Sampling patterns are different under different conditions which help in estimation of fault in MT- HVDC transmission system as shown in Fig. 6. In the normal condition, highest variation in sampling pattern is observed at a time step just before 600 as shown in Fig. 6 (a). In the fault condition of transmission line of 200 km long, highest variation is observed at a time step near to 200 as depicted in Fig. 6 (b). In Fig. 6 (c), highest variation is observed at time step closed to 150. These variations aid in determining the fault in three terminal HVDC test model. These variations are actually the gradient of difference of divergence utilized in restricted Boltzmann machine. These results help in determining the fault conditions established near converter stations.

Error vector with respect to time steps obtained while training RBM with contrastive divergence (CD) algorithm.

This figure depicts the following conditions: (a) Sampling pattern of normal condition of test model in 1000 time steps. (b) Sampling pattern of faulty conditions at inverter station (VSC – II) in test model in 1000 time steps. (c) Sampling pattern of faulty conditions at inverter station (VSC – III) in test model in 1000 time steps.
7 Conclusion
Restricted Boltzmann machine is an emerging technique to estimate fault in VSC – HVDC transmission system. In this research, contrastive divergence based learning is developed for restricted Boltzmann machine. The gradient of the difference of divergence is evaluated under different states of HVDC transmission model. Based on the gradient of difference of divergences, healthy and faulty state of HVDC system are found effectively. Moreover, change in the value of gradient with respect to fault distance helps in determining the fault location in multi terminal HVDC transmission system. In future, this idea can be extended to classification with respect to different type of faults.
References
Hingorani, N.G.: High voltage DC transmission: a power electronics workhorse. IEEE Spectr. 33(4), 63–72 (1996)
Ellert, F.J.: HVDC for the long run. Spectrum, 36–42 (1976)
Arrillaga, J.J.: High Voltage Direct Current Transmission. Peter Peregrinus Ltd., Stevenage (1983)
Padyar, K.R.: HVDC Power Transmission Systems. Wiley Eastern, New Delhi (1990)
High Voltage Direct Current Handbook, California Electric Power Research Institute, Palo Alto, California (1994)
Starke, M., Tolbert, L.M., Ozpineci, B.: AC vs. DC distribution: a loss comparison. In: IEEE/PES Transmission and Distribution Conference and Exposition, Chicago, IL, pp. 1–7 (2008)
Sun, T., Xia, J., Sun, Y., Mao, X.: Research on the applicable range of AC and DC transmission voltage class sequence. In: International Conference on Power System Technology, Chengdu, pp. 374–380 (2014)
Meah, K., Ula, S.: Comparative evaluation of HVDC and HVAC transmission systems. In: IEEE Power Engineering Society General Meeting, Tampa, FL, pp. 1–5 (2007)
Uhlmann, E.: Power Transmission by Direct Current. Springer, Heidelberg (1975). https://doi.org/10.1007/978-3-642-66072-6
Bowles, J.P., et al.: AC-DC economics and alternatives-1987 panel session report. IEEE Trans. Power Delivery 5(4), 1241–1248 (1990)
Bateman, L.A., Haywood, R.W.: Nelson river DC transmission project. IEEE Trans. Power Appar. Syst. PAS 88(5), 688–693 (1969)
Halder, T.: Comparative study of HVDC and HVAC for a bulk power transmission. In: International Conference on Power, Energy and Control (ICPEC), Sri Rangalatchum Dindigul, pp. 139–144 (2013)
Ruderval, R., Charpenitier, J.P., Sharma, R.: High voltage direct current transmission systems technology review paper. Energy Week, Washington D.C., USA (2000)
Hammad, A.E., Long, W.F.: Performance and economic comparisons between point-to-point HVDC transmission and hybrid back-to-back HVDC/AC transmission. IEEE Trans. Power Delivery 5(2), 1137–1144 (1990)
Chamia, M.: The role of HVDC transmission in the 21st century. In: IEEE WPM - Panel Session (1999)
Tenzer, M., Koch, H., Imamovic, D.: Underground transmission lines for high power AC and DC transmission. In: IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Dallas, TX, pp. 1–4 (2016)
Long, W.F., Litzenberger, W.: Fundamental concepts in high voltage direct current power transmission PES (T&D), Orlando, FL, pp. 1–2 (2012)
Bahrman, M.P.: Overview of HVDC transmission. IEEE PES Power Systems Conference and Exposition, Atlanta, GA, pp. 18–23 (2006)
Wang, H., Redfern, M.A.: The advantages and disadvantages of using HVDC to interconnect AC networks. In: 45th International Universities Power Engineering Conference (UPEC), pp. 1–5 (2010)
Keim, T., Bindra, A.: Recent advances in HVDC and UHVDC transmission [Happenings]. IEEE Power Electron. Mag. 4(4), 12–18 (2017)
Muzzammel, R., et al.: MT–HVdc systems fault classification and location methods based on traveling and non-traveling waves—a comprehensive review. Appl. Sci. 9, 4760 (2019)
Muzzammel, R.: Traveling waves-based method for fault estimation in HVDC transmission system. Energies 12, 3614 (2019)
Muzzammel, R., Fateh, H.M., Ali, Z.: Analytical behaviour of thyrister based HVDC transmission lines under normal and faulty conditions. In: International Conference on Engineering and Emerging Technologies (ICEET), pp. 1–5, Lahore (2018)
Muzzammel, R.: Machine learning based fault diagnosis in HVDC transmission lines. In: Bajwa, I.S., Kamareddine, F., Costa, A. (eds.) INTAP 2018. CCIS, vol. 932, pp. 496–510. Springer, Singapore (2019). https://doi.org/10.1007/978-981-13-6052-7_43
Zhang, Y., Tai, N., Xu, B.: Fault analysis and traveling wave protection scheme for bipolar HVDC lines. IEEE Trans. Power Deliv. 27(3), 1583–1591 (2012)
Johnson, J.M., Yadav, A.: Complete protection scheme for fault detection, classification and location estimation in HVDC transmission lines using support vector machines. IET Sci. Meas. Technol. 11(3), 279–287 (2017)
He, Z., Liao, K., Li, X., Lin, S., Yang, J., Mai, R.: Natural frequency based line fault location in HVDC lines. IEEE Trans. Power Deliv. 29(2), 851–859 (2014)
Huai, Q., et al.: Backup protection scheme for multi-terminal HVDC system based on wavelet-packet energy entropy. IEEE Access 7, 49790–49803 (2019)
Leterme, W., Azad, S.P., Van Hertem, D.: HVDC grid protection algorithm design in phase and modal domains. IET Renew. Power Gener. 12(13), 1538–1546 (2018)
Salehi, M., Namdari, F.: Fault classification and faulted phase selection for transmission line using morphological edge detection filter. IET Gener. Transm. Distrib. 12(7), 1595–1605 (2018)
Luo, G., Yao, C., Liu, Y., Tan, Y., He, J., Wang, K.: Stacked auto-encoder based fault location in VSC-HVDC. IEEE Access 6, 33216–33224 (2018)
Hoseinzadeh, B., Amini, M.H., Bak, C.L., Blaabierg, F.: High impedance DC fault detection and localization in HVDC transmission lines using harmonic analysis. In: International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe, EEEIC/I&CPS Europe, pp. 1–4 (2018)
Lan, S., Chen, M.J., Chen, D.Y.: A novel HVDC double terminal nonsynchronous fault location method based on convolutional neural network. IEEE Trans. Power Deliv. 34(3), 848–857 (2019)
Suonan, J., Gao, S., Song, G.: A novel fault location method for HVDC transmission lines. IEEE Trans. Power Deliv. 25, 1203–1209 (2010)
Nanayakkara, O., Rajapakse, A., Wachal, R.: Travelling wave-based line fault location in star-connected multi-terminal HVDC systems. IEEE Trans. Power Deliv. 27, 2286–2294 (2012)
Dewe, M.B., Sankar, S., Arrillaga, J.: The application of satellite time references to HVDC fault location. IEEE Trans. Power Deliv. 8(3), 1295–1302 (1993)
Li, Y., Zhang, S., Li, H.: A fault location method based on genetic algorithm for high-voltage direct current transmission line. Eur. Trans. Electr. Power 22, 866–878 (2012)
Yuangsheng, L., Gang, W., Haifeng, L.: Time domain fault-location method on HVDC transmission lines under unsynchronized two-end measurement and uncertain line parameters. IEEE Trans. Power Deliv. 30, 1031–1038 (2015)
Livani, H., Evrenosoglu, C.Y.: A single-ended fault location method for segmented HVDC transmission line. Electr. Power Syst. Res. 107, 190–198 (2014)
Guoing, S., Xu, C., Xinlei, C.: A fault location method for VSC-HVDC transmission lines based on natural frequency of current. Electr. Power Energy Syst. 63, 347–352 (2014)
Yusuff, A.A., Jimoh, A.A., Munda, J.L.: Fault location in transmission lines based on stationary wavelet transform determinant function feature and support vector regression. Electr. Power Syst. Res. 110, 73–83 (2014)
Azad, S.P., Hertem, D.V.: A fast local bus current-based primary relaying algorithm for HVDC grids. IEEE Trans. Power Deliv. 32(1), 193–202 (2017)
Bucher, M.K., Franck, C.M.: Fault current interruption in multiterminal HVDC networks. IEEE Trans. Power Deliv. 31(1), 87–95 (2016)
Mokhberdoran, A., Silva, N., Leite, H., Carvalho, A.: Unidirectional protection strategy for multi-terminal HVDC grids. Trans. Environ. Electr. Eng. 1(4), 58–65 (2016)
Leterme, W., Azad, S.P., Hertem, D.V.: A local backup protection algorithm for HVDC grids. IEEE Trans. Power Deliv. 31(4), 1767–1775 (2016)
Hertem, D.V., Ghandhari, M.: Multi-terminal VSC HVDC for the European supergrid: obstacles. Renew. Sustain. Energy Rev. 14(9), 3156–3163 (2010)
Kerf, K.D., et al.: Wavelet-based protection strategy for dc faults in multi-terminal VSC HVDC systems. IET Gen. Transm. Distrib. 5(4), 496–503 (2011)
Leterme, W., Beerten, J., Hertem, D.V.: Non-unit protection of HVDC grids with inductive dc cable termination. IEEE Trans. Power Del. 31(2), 820–828 (2016)
Sneath, J., Rajapakse, A.D.: Fault detection and interruption in an earthed HVDC grid using ROCOV and hybrid dc breakers. IEEE Trans. Power Deliv. 31(3), 973–981 (2016)
Elmore, W.A.: Protective Relaying Theory and Applications. Marcel Dekker, New York (2004)
Naidoo, D., Ijumba, N.: HVDC line protection for the proposed future HVDC systems. In: Proceedings IEEE PowerCon, vol. 2, pp. 1327–1332 (2004)
Sun, J., Saeedifard, M., Meliopoulos, A.P.S.: Backup protection of multi-terminal HVDC grids based on quickest change detection. IEEE Trans. Power Deliv. 34(1), 177–187 (2019)
Farshad, M.: Detection and classification of internal faults in bipolar HVDC transmission lines based on K-means data description method. Int. J. Electr. Power Energy Syst. 104, 615–625 (2019)
Azad, S.P., Leterme, W., Hertem, D.V.: A DC grid primary protection algorithm based on current measurements. In: 17th European Conference on Power Electronics and Applications, EPE 2015 ECCE-Europe, Geneva, pp. 1–10 (2015)
Yang, Q., Blond, S.L., Aggarwal, R., Wang, Y., Li, J.: New ANN method for multi-terminal HVDC protection relaying. Electr. Power Syst. Res. 148, 192–201 (2017)
Augustin, T., Jahn, I., Norrga, S., Nee, H.: Transient behaviour of VSC-HVDC links with DC breakers under faults. In: 19th European Conference on Power Electronics and Applications, EPE 2017 ECCE Europe, Warsaw, pp. P.1–P.10 (2017)
Li, C., Gole, A.M., Zhao, C.: A fast DC fault detection method using DC reactor voltages in HVDC grids. IEEE Trans. Power Deliv. 33(5), 2254–2264 (2018)
Bertho, R., Lacerda, V.A., Monaro, R.M., Vieira, J.C.M., Coury, D.V.: Selective nonunit protection technique for multiterminal VSC HVDC grids. IEEE Trans. Power Deliv. 33(5), 2106–2114 (2018)
Xie, Z., Zou, G., Gao, L., Zhang, J., Gao, H.: Voltage pole-wave protection scheme for multi-terminal DC grid. J. Eng. 2019(16), 806–811 (2019)
Yeap, Y.M., Ukil, A.: Fault detection in HVDC system using short time fourier transform. In: IEEE Power and Energy Society General Meeting, PESGM, Boston, MA, pp. 1–5 (2016)
Brigham, E.O.: The Fast Fourier Transform. Prentice Hall, Englewood Cliffs (1974)
Vasanth, S., Yeap, Y.M., Ukil, A.: Fault location estimation for VSC-HVDC system using artificial neural network. In: IEEE Region 10 Conference, TENCON, pp. 501–504 (2016)
Elgeziry, M.Z., Elsadd, M.A., Elkalashy, N.I., Kawady, T.A., Taalab, A.M.I.: AC spectrum analysis for detecting DC faults on HVDC systems. In: 19th International Middle East Power Systems Conference, MEPCON, pp. 708–715 (2017)
Satpathi, K., Yeap, Y.M., Ukil, A., Geddada, N.: Short-time Fourier Transform based transient analysis of VSC interfaced point-to-point dc system. IEEE Trans. Industr. Electron. 65(5), 4080–4091 (2018)
Ukil, A., Yeap, Y.M., Satpathi, K., Geddada, N.: Fault identification in AC and DC systems using STFT analysis of high frequency components. In: IEEE Conference on Innovative Smart Grid Technologies – Asia, ISGT-Asia, pp. 1–6 (2017)
Gaouda, A.M., El-Saadany, E.F., Salama, M.M.A., Sood, V.K., Chikhani, A.Y.: Monitoring HVDC systems using wavelet multi-resolution analysis. IEEE Trans. Power Syst. 16(4), 662–670 (2001)
Murthy, P.K., Amarnath, J., Kamakshiah, S., Singh, B.P.: Wavelet transform approach for detection and location of faults in HVDC system. In: IEEE Region 10 and the Third international Conference on Industrial and Information Systems, Kharagpur, pp. 1–6 (2008)
Wang, G., Wu, M., Li, H., Hong, C.: Transient based protection for HVDC lines using wavelet-multiresolution signal decomposition. In: Proceedings IEEE/Power Engineering Society Transmission and Distribution Conference, Asia Pacific, pp. 1–4 (2005)
Cai, X., Song, G., Gao, S.: A novel fault-location method for VSC-HVDC transmission lines based on natural frequency of current. Proc. CSEE 28(31), 112–119 (2011)
Liu, X., Osman, A.H., Malik, O.P.: Hybrid traveling wave/boundary protection for monopolar HVDC line. IEEE Trans. Power Deliv. 24(2), 569–578 (2009)
Yang, Y., Tai, N., Fan, C., Yang, L., Chen, S.: Resonance frequency-based protection scheme for ultra-high-voltage direct-current transmission lines. IET Gener. Transm. Distrib. 12(2), 318–327 (2018)
Liu, J., Fan, C., Tai, N.: A novel pilot directional protection scheme for HVDC transmission line based on specific frequency current. In: International conference on Power System Technology, POWERCON, pp. 976–982 (2014)
Cheng, J., Guan, M., Tang, L.V., Huang, H.: A fault location criterion for MTDC transmission lines using transient current characteristics. Int. J. Electr. Power Energy Syst. 61, 647–655 (2014)
Wang, D., Gao, H.L., Luo, S.B., Zou, G.B.: Travelling wave pilot protection for LCC-HVDC transmission lines based on electronic transformers differential output characteristic. Int. J. Electr. Power Energy Syst. 93, 283 (2017)
Farshad, M., Sadeh, J.: A novel fault-location method for HVDC transmission lines based on similarity measure of voltage signals. IEEE Trans. Power Deliv. 28(4), 2483–2490 (2013)
Jana, S., De, A.: A novel zone division approach for power system fault detection using ANN-based pattern recognition technique. Can. J. Electr. Comput. Eng. 40(4), 275–283 (2017)
Wang, Y., Hao, Z., Zhang, B., Kong, F.: A pilot protection scheme for transmission lines in VSC-HVDC grid based on similarity measure of traveling waves. IEEE Access 7, 7147–7158 (2019)
Santos, R.C., Blond, S.L., Coury, D.V., Aggarwal, R.K.: A novel and comprehensive single terminal ANN based decision support for relaying of VSC based HVDC links. Electr. Power Syst. Res. 141, 333 (2016)
Tzelepis, D., Dyśko, A., Fusiek, G., Niewczas, P., Mirsaeidi, S., Booth, C., Dong, X.: Advanced fault location in MTDC networks utilizing optically-multiplexed current measurements and machine learning approach. Int. J. Electr. Power Energy Syst. 97, 319 (2018)
Liu, X., Wei, W., Yu, F.: SVM theory and its application in fault diagnosis of HVDC system. In: 3rd International Conference on Natural Computation, ICNC 2007, Haikou, pp. 665–669 (2007)
Chang, C.C., Lin, C.J.: LIBSVM: a library for support vector machines. ACM Trans. Intell. Syst. Technol. 2(3), 1–27 (2011)
Breiman, L.: Random forests. Mach. Learn. 45(1), 5–32 (2001)
Tuv, E.: Ensemble learning. In: Guyon, I., Nikravesh, M., Gunn, S., Zadeh, L.A. (eds.) Feature Extraction: Foundations and Applications, pp. 187–204. Springer, Heidelberg (2006). https://doi.org/10.1007/978-3-540-35488-8_8
Robnik-Šikonja, M., Kononenko, I.: Theoretical and empirical analysis of ReliefF and RReliefF. Mach. Learn. 53(1), 23–69 (2003)
Abdelgayed, T.S., Morsi, W.G., Sidhu, T.S.: Fault detection and classification based on co-training of semi supervised machine learning. IEEE Trans. Industr. Electron. 65(2), 1595–1605 (2018)
Jarrahi, M.A., Samet, H., Ghanbari, T.: Fast current-only based fault detection method in transmission line. IEEE Syst. J. 13(2), 1725–1736 (2019)
Chen, M., Lan, S., Chen, D.: Machine learning based one-terminal fault areas detection in HVDC transmission system. In: 8th International Conference on Power and Energy Systems, ICPES, Colombo, Sri Lanka, pp. 278–282 (2018)
Padiyar, K.R., Prabhu, N.: Modelling, control design and analysis of VSC based HVDC transmission systems. In: International Conference on Power System Technology, PowerCon 2004, vol. 11, pp. 774–779 (2004)
Meier, S.: Novel voltage source converter based HVDC transmission system for offshore wind farms. Department of Electrical Engineering Electrical Machines and Power Electronics, Royal Institute of Technology, Stockholm (2005)
Undeland, N.M.T., Robbins, W.: Power Electronics: Converters, Applications, and Design (2003)
Mohamed, Z.S.A.K., Samir, H., Karim, F.M., Rabie, A.: Performance analysis of a voltage source converter (VSC) based HVDC transmission system under faulted conditions. Leonardo J. Sci., 33–46 (2009)
Ana-Irina Stan, D. I. S.: Control of VSC-based HVDC transmission system for offshore wind power plants. Department of Energy Technology, Aalborg University, Denmark (2010)
Cuiqing, D., et al.: A new control strategy of a VSC-HVDC system for high quality supply of industrial plants. IEEE Trans. Power Deliv. 22, 2386–2394 (2007)
Bajracharya, C.: Control of VSC-HVDC for wind power. Master of Science in Energy and Environment, Department of Electrical Power Engineering, Norwegian University of Science and Technology, Trondheim (2008)
De Oliveira Filho, M.E., et al.: A control method for voltage source inverter without dc link capacitor. In Power Electronics Specialists Conference, pp. 4432–4437 (2008)
Machaba, M.B.M.: Explicit damping factor specification in symmetrical optimum tuning of PI controllers. In: 1st African Control Conference, Cape Town, South Africa (2003)
Namho, H., et al.: Fast dynamic DC-link power balancing scheme for a PWM converter inverter system. Proc. Ind. Electron. Soc. 2, 767–772 (1999)
Salakhutdinov, R., Mnih, A., Hinton, G.: Restricted Boltzmann machines for collaborative filtering. In: Proceedings of the 24th International Conference on Machine Learning, ACM 2007 (2007)
Mobahi, H., Collobert, R. (eds.): Deep learning from temporal coherence in video. In: International Conference on Machine Learning, ACM 09, Canada (2009)
Larochelle, H., Bengio, Y. (eds.): Classification using discriminative restricted Boltzmann machines. In: Proceedings of the 25th International Conference on Machine Learning, ACM 2008, Helsinki, Finland (2008)
Larochelle, H., Mandel, M.I. (eds.): Learning algorithms for the classification restricted Boltzmann machine. J. Mach. Learn. Res. 13, 643–669 (2012)
Bengio, Y.: Foundations and trends in machine learning 2, 1–127 (2009)
Lei, Y., Jia, F., Lin, J., Xing, S., Ding, S.X.: An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Industr. Electron. 63(5), 3137–3147 (2016)
Wong, K.P.: Artificial intelligence and neural network applications in power systems. In: 2nd International Conference on Advances in Power System Control, Operation and Management, APSCOM 1993, vol. 1, Hong Kong, pp. 37–46 (1993)
Hinton, G.E.: Training products of experts by minimizing contrastive divergence. J. Neural Comput. 14(8), 1771–1800 (2002)
Fischer, A., Igel, C.: Bounding the bias of contrastive divergence learning. Neural Comput. 23(3), 664–673 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Muzzammel, R. (2020). Restricted Boltzmann Machines Based Fault Estimation in Multi Terminal HVDC Transmission System. In: Bajwa, I., Sibalija, T., Jawawi, D. (eds) Intelligent Technologies and Applications. INTAP 2019. Communications in Computer and Information Science, vol 1198. Springer, Singapore. https://doi.org/10.1007/978-981-15-5232-8_66
Download citation
DOI: https://doi.org/10.1007/978-981-15-5232-8_66
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5231-1
Online ISBN: 978-981-15-5232-8
eBook Packages: Computer ScienceComputer Science (R0)