
Abstract
Synchronous static compensator (STATCOM) can also be used to improve the dynamic performance of a power system apart from being used for reactive power compensation. This article performs a comparative study for robust STATCOM control designs based on graphical loop-shaping and simultaneous tuning using Particle Swarm Optimization (PSO) for a single machine infinite bus system (SMIB) equipped with STATCOM. The power system working at various operating conditions is considered as a finite set of plants. Fixed parameter robust controllers were designed considering the voltage magnitude of the voltage source converter (VSC), a part of the STATCOM system, as the input and speed deviation of the generator as the system output. Simulation studies are conducted on a simple power system which indicates that the designed robust controllers by the two methods provide very good damping properties over a wide range of operating conditions, but the simultaneous tuning method using particle swarm optimization is easy to implement compared to the cumbersome graphical loop-shaping technique.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
- Power system damping
- STATCOM
- Voltage source converter (VSC)
- Robust control
- Loop-Shaping
- Simultaneous tuning
- Particle swarm optimization (PSO)
1 Introduction
Flexible AC transmission system (FACTS) devices are well known for their ability to improve the power system dynamic and transient performances. FACTS devices vary the admittance between the two points in a transmission network and hence dynamically control the power flow through the transmission network. With the advent of the Voltage Source Converters (VSC) static synchronous compensator (STATCOM) is made possible. STATCOM is a controllable synchronous voltage source and is increasingly being used in power systems to control the real-time power flow and for rotor oscillation damping. The STATCOM is similar to the static var compensator in a way that it provides shunt compensation, but STATCOM uses a voltage source converter instead of shunt capacitors and reactors as in the case of static var compensator [1–5]. STATCOM provides a large number of performance benefits. The control circuit in the STATCOM has auxiliary signals that can be used for damping enhancement of a power system in terms of its rotor angular stability [3–5]. Many control strategies for dynamic performance improvement of power system using STATCOM control have been reported in the literature. A rule-based control strategy for STATCOM is proposed in [4]. The multivariable sampled regulator was designed for STATCOM to control the rotor angle oscillations in [5]. Some control techniques for STATCOM control that show robust performance have also been studied [6–8]. In [8] robust control of SVC and STATCOM using the H∞ design approach is presented. Designing robust controllers using H∞ approach is a tedious task. A simple loop-shaping technique, that produces a robust controller with fixed parameters, has been reported in [6, 7]. The design of robust controllers using evolutionary optimization techniques for damping enhancement of power system oscillations by the simultaneous stabilization technique has been presented in [9, 10]. Simultaneous stabilization is known to be a very challenging problem and no general systematic solution is obtainable. Iterative optimization techniques are proven to be the best alternatives in the absence of analytic solutions. A single set of PSS parameters can be found using a simultaneous stabilization method to guarantee the stabilization of the power system over the wide range of operations as reported in [9, 10].
In this paper, robust controllers were designed by the graphical loop-shaping technique and simultaneous stabilization approach using PSO for a single machine infinite system installed with STATCOM. In the graphical loop- shaping technique changes in the system loading conditions were included as a structured uncertainty model. In the simultaneous stabilization technique, the power system operating at different operating points is considered as a finite set of system transfer functions. The problem of selecting a fixed parameter robust controller is transformed into a simple optimization problem which is solved by Particle Swarm Optimization (PSO) and an eigen value-based objective function. The effectiveness of both methods is compared through nonlinear simulations of the power system installed with STATCOM.
2 The Power System Model Installed with STATCOM
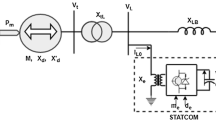
Figure 1 shows a SMIB with a STATCOM installed in the middle of the transmission line. The generator is represented in terms of two electromechanical swing equations and an internal voltage equation. The dynamic model of the power system installed with STATCOM at the mid-point of the transmission line can be represented by a set of nonlinear equations given by (1) [11]. In (1), δ and ω are the rotor angle and generator speed whereas Efd and eq′ are the field voltage and internal voltage, respectively.

SMIB power system with STATCOM
The STATCOM is connected to the transmission line through a step-down transformer (SDT) with a leakage reactance equal to XSDT. A three-phase GTO-based voltage source converter, and a D.C. capacitor is an inherent part of the STATCOM system. The dynamic relationship that exists between STATCOM current (Idc) and the capacitor voltage (Vdc) can be represented by (2),
The direct and quadrature axes components of STATCOM current ILo are represented as ILod and ILoq. The output voltage phasor is given by (3),
In (2) and (3), ψ is the phase and m is the modulation index.
If the state and control vectors are taken as,
Then the nonlinear state equations given by (1) and (2) for the SMIB with STATCOM can be represented as in (4),
3 The Design of Robust Controller for STATCOM Using Graphical Loop-Shaping Technique
The design of robust controller for the SMIB with STATCOM, begins by linearizing the nonlinear model of (4), around a nominal operating point
In the state space model of (5), control u is the modulation index m which is a measure of the STATCOM voltage magnitude. The nominal plant transfer function is
Perturbations in the plant operating points is incorporated by a structured uncertainty model as
Equation (7) is the multiplicative uncertainty model where, W2 is a fixed stable transfer function, D is a variable transfer function satisfying \( \left\| D \right\|_{\infty } < 1 \). If \( \left\| D \right\|_{\infty } < 1 \) then
Therefore, \( \left| {W_{2} (j\omega )} \right| \) is the uncertainty profile and in the frequency domain is the upper boundary of all the normalized plant transfer functions away from 1. For a controller function C in series with the plant P, the robustness criteria are
-
1.
The nominal performance measure is \( \left\| {W_{1} S} \right\|_{\infty } < 1 \)
-
2.
C provides robust stability if
$$ \left\| {W_{2} T} \right\|_{\infty } < 1 $$(9) -
3.
Necessary and sufficient condition for robust nominal and robust performance is \( \left\| {\left| {W_{1} S} \right| + \left| {W_{2} T} \right|} \right\|_{\infty } < 1 .\)
It is to be noted here that W1 is a real, rational, stable and minimum phase function. T is the input-output transfer function, S is the complement of the sensitivity function, and is given by
Loop-shaping is a graphical method to design a robust controller C satisfying performance criteria and robust stability criteria as given in (9). The method relies on graphically constructing the open-loop transfer function, L = PC to satisfy the robust performance criterion approximately, and then finally the robust controller is obtained from the relationship C = L/P. The constraints of this graphical method are internal stability of the plants and properness of C. Open-loop transfer function L should be constructed such that PC should not have any pole zero cancellation. An essential condition for robustness is that either or both |W1|, |W2| must be less than 1 [7]. For a monotonically decreasing function W1, it can be shown that at low frequency the open-loop transfer function L should satisfy
while for high frequency
4 The Particle Swarm Optimization (PSO)
4.1 Introduction to PSO
The PSO is a heuristic optimization algorithm based on the social behavior of bird flocking and fish schooling and it was developed by Abdel-Magid et al. [9]. Similar to other evolutionary algorithms like Genetic Algorithms, PSO is also an optimization technique based on population. Unlike GA no operations in PSO are inspired by evolution to find new generations of candidate solutions, but instead, PSO depends on the exchange of information between individuals known as particles of the population [12–14]. The particles in the swarm update their own velocity and position according to the following equations given by (13) and (14), respectively.
In (13) K1 and K2 are two positive constants, rand1 ( ) and rand2 ( ) are random numbers in the range [0, 1], and Q is the inertia weight. Xi represents the position of the ith particle in the swarm and Vi is particle velocity in Eq. (14).
4.2 PSO Flow Chart
The PSO flow chart used in this paper is shown in Fig. 2.

Flow chart of PSO
4.3 Simultaneous Tuning Using PSO
In this approach, the controller structure is pre-selected as two lead-lag blocks and a washout given by
where K is the stabilizer gain, T1, T2, T3, and T4 are stabilizer time constants and Tw is the washout time constant. In this controller structure, Tw is usually a pre-selected value. The constraints on the values of K and the time constants are given by
The objective function J to be minimized in the PSO algorithm is an eigen value-based objective function chosen to place the real part of the complex eigen values of the mechanical modes at a pre-determined location in the s-plane for all the operating points considered. The performance index is expressed as
where \( \sigma_{s} \) and \( \sigma_{i} \) are pre-selected value and real part of eigen value of the mechanical mode for the ith plant respectively and N is the number of operating points considered during the design.
5 Implementation of Robust Controllers
5.1 Graphical Procedure
For the SMIB with STATCOM of Fig. 1, the input is chosen as the modulation index m whereas changes in angular speed, Δω of generator is chosen as the system output. For the chosen nominal operation, the nominal plant is given by (18)
Output power ranges between 0.4 and 1.4 pu and the range of power factor considered is 0.8 lagging to 0.8 leading. The uncertainty profile is fitted to the weight function, W2 given by
W1(s) is chosen as a Butterworth filter that satisfies all the properties of the uncertainty profile and is given by (20)
In (20) Kd = 0.01 and fc = 0.1 are chosen, and L is given by (21) and C by (22)
The bode plots for W1, W2, and L, which were used to find this robust controller, is given in Fig. 3a. The open-loop function L given by (21) is chosen to satisfy the boundaries set by (11–12). Figure 4 shows the plots for nominal and robust performance criteria. As evident from Fig. 3b, the nominal performance measure W1S is well-satisfied whereas the combined robust stability and performance measure has a slight peak.

a Graphical loop-shaping plots relating W1, W2, and L. b The robust performance criteria

a Convergence rate of the objective function. b Pole placement for four different operating points
5.2 Simultaneous Tuning Using PSO
The proposed approach is implemented on the power system shown in Fig. 1. The PSO algorithm was used to minimize the objective function given by (17) where \( \sigma_{s} \) was chosen as −0.6 as it gives the best damping properties for the power system. The PSO algorithm converged to give the following settings for the lead-lag controller blocks: K = 27.4, T1 = T3 = 0.0120, T2 = T4 = 0.0222. The washout time constant Tw was selected as 2 s.
The convergence rate of the objective function J is shown in Fig. 4a. It is evident from Fig. 4a that the objective function reaches the minimum value very fast. Figure 4b shows the placement of poles for four different operating points. It can be observed clearly that the real parts of the poles (\( \sigma_{i} \)) are exactly placed as desired at −0.6 for the four operating points considered during the design. A comparison of the simulation results with the graphical loop-shaping and simultaneous tuning using PSO is given in Fig. 5.

Comparison of rotor angle changes upon a 50% disturbance on torque input (solid line is for loop-shaping technique and dotted line for simultaneous tuning using PSO)
The rotor angle response for the four loading conditions are presented in Fig. 5. It can be deduced that both the graphical loop-shaping technique and simultaneous tuning using PSO produce robust controllers that give almost identically good transient performance.
6 Conclusions
In this paper, a comparative study was performed for designing robust STATCOM controllers by the graphical loop-shaping method and simultaneous tuning using Particle Swarm Optimization (PSO). Uncertainties in system loading conditions were considered for the purpose of design. However, the methods can also be applied with equal ease to include the uncertainties in the generator parameter variations. Both the graphical loop-shaping method and the simultaneous tuning method give almost similar transient responses. It was observed that the transient response for light conditions was found to be much better in the case of simultaneous tuning when compared to the graphical loop-shaping method. It is to be noted that compared to simultaneous tuning using PSO, the graphical loop-shaping method is more mathematically involved and requires graphical construction of weight function W2 which is a bit time-consuming procedure for the amateur designer.
References
Gyugi L (1994) Dynamic compensation of AC transmission lines by solid state synchronous voltage sources. IEEE Trans Power Deliv 9(2):904–911
Machowski J (1997) Power system dynamics and stability. Wiley
Wang H, Li F (2000) Multivariable sampled regulators for the coordinated control of STATCOM AC and DC voltage. IEEE Proc Gen Trans Distrib 147(2):93–98
Li C, Jiang Q, Wang Z, Rezmann D (1998) Design of a rule-based controller for STATCOM. In: Proceedings of the 24th annual conference of the IEEE industrial electronics society, vol 1, IECon’98, pp 467–472
Wang HF, Li F (2000) Design of STATCOM multivariable sampled regulator. In: International conference on electric utility deregulation and restructuring and power technologies, City University, London
Rahim AHMA, Al-Baiyat SA, Kandlawala FM (2001) A robust STATCOM controller for power system dynamic performance enhancement. In: IEEE PES summer meeting, Vancouver, pp 887–892
Rahim AHMA, Kandlawala FM (2004) Robust STATCOM voltage controller design using loop-Shaping technique. Electr Power Syst Res 68:61–74
Farasangi MM, Song YH, Sun YZ (2000) Supplementary control design of SVC and STATCOM using H∞ optimal robust control. In: Proceeding international conference on electric utility deregulation, City University, London, pp 355–360
Abdel-Magid YL, Abido MA, Al-Baiyat S, Mantawy AH (1999) Simultaneous stabilization of multi-machine power system via genetic algorithms. IEEE Trans Power Syst 14(4):1428–1439
Abdel-Magid YL, Abido MA (2003) Optimal multi-objective design of robust power system stabilizer using genetic algorithms. IEEE Trans Power Syst 18(3):1125–1132
Wang HF (1999) Philips-Hefron model of power systems installed with STATCOM and applications. IEEE Proc Gen Trans Distrib 146(5):521–527
Kennedy J, Eberhart R (1995) Particle swarm optimization. IEEE Int Conf Neural Netw 4:1942–1948
Shi Y, Eberhart RC (1999) Empirical study of PSO. In: IEEE Proceedings of the 1999 congress on evolutionary computation, vol 3, pp 6–9
Kennedy J (1997) The particle swarm optimization: social adaptation of knowledge. In: International conference of evolutionary computation, Indianapolis, pp 303–308
Acknowledgements
The authors would like to acknowledge the facilities provided at the Electrical Engineering and Computer Science Department at Khalifa University of Science and Technology and Birla Institute of Technology and Science Pilani, Dubai Campus, UAE towards this research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Faisal, S.F., Beig, A.R., Thomas, S. (2020). Comparative Study for Robust STATCOM Control Designs Based on Loop-Shaping and Simultaneous Tuning Using Particle Swarm Optimization. In: Goel, N., Hasan, S., Kalaichelvi, V. (eds) Modelling, Simulation and Intelligent Computing. MoSICom 2020. Lecture Notes in Electrical Engineering, vol 659. Springer, Singapore. https://doi.org/10.1007/978-981-15-4775-1_45
Download citation
DOI: https://doi.org/10.1007/978-981-15-4775-1_45
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-4774-4
Online ISBN: 978-981-15-4775-1
eBook Packages: Computer ScienceComputer Science (R0)