
Abstract
According to the three-step construction plan of BDS, the global signal will cover worldwide by June of 2020. The BDGIM model is innovatively proposed to correct the single frequency ionospheric delay in BDS. As a new model, it is necessary to analyze the performance of BDGIM. Based on the ionosphere data of CODE, this paper compares the performance of BDGIM with that of BDSKlob, GPSKlob and NeQuickG in the aspects of space, time and the effects on single point positioning. The results show that compared with the other ionospheric models, BDGIM model is closest to CODE. Excluding the high latitude area, the BDGIM model is the best among all the single ionospheric models in the other areas. NeQuickG model shows the best performance in high latitude area and become worse in low and mid latitude areas. Compared with the BDSKlob model of BDS-2, the BDGIM model of BDS-3 has been greatly improved. The accuracy of BDGIM model in the Northern hemisphere is better than that in the Southern, and the correction ratio is better than 75% over China and exceed 65% worldwide. Compared with the SPP results of using BDSKlob model, the positioning accuracy based on BDGIM model is improved by 25% and the positioning improvement in high latitude area is more obvious, which almost reached 45%.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Ionosphere is one main error in GNSS which affect the performance of navigation satellite system. When the electromagnetic waves of GNSS signals travel through the ionosphere, the velocity and direction will be changed. Therefore, GNSS need to broadcast the correction parameters of ionospheric delay to its users [1,2,3,4].
At present, excepting for the GLONASS satellite navigation system, the other three navigation satellite systems both broadcast single frequency ionosphere model parameters in their navigation messages. GPS adopts the Klobuchar model, GPSKlob, to correct the ionospheric delay and Galileo takes NeQuickG model as the solution. BDS-2 employs almost the same Klobuchar model which abbreviated as BDSKlob. In the newly published ICD of BDS-3, the BDGIM is used to correct the global ionospheric delay [5, 6].
In this paper, the BDGIM model is compared with BDSKlob, GPSKlob and NeQuickG. The performance improvement of BDGIM model compared with other models is analyzed. Firstly, the performance of BDGIM model with space and time is analyzed. Secondly, the correction performance of the all the ionosphere model at different latitudes in 2019 is analyzed. Finally, the improvements with BDGIM correcting ionospheric delay in SPP are compared with that with other models.
2 Ionosphere Models of BDS
2.1 BDSKlob Model of BDS-2
Klobuchar model is an ionosphere model based on the function of trigonometric cosine [8] which takes the diurnal characteristics and periodic variation of ionosphere and basically reflects the variation of ionosphere. The difference of latitudes is also considered and the default maximum of ionospheric delay occurs at the local time of 14:00. The ionospheric delay is modeled as the cosine function of local time in day and a constant of 5 ns in night [9,10,11,12]. The BDSKlob model of BDS-2 is,
Where \( I_{ion} \) is the vertical ionospheric delay, \( t \) is the local time of the ionospheric pierce point (IPP), \( A_{1} \) is the ionospheric delay at night and \( A_{2} \) is the amplitude of the cosine function,
BDSKlob draws on the experience of GPSKlob and improves the GPSKlob model. There are several differences between them.
-
(1)
BDSKlob model
The solar fixed geographical coordinate system is adopted by this model [12]. The radius of earth is taken as 6378 km and the ionosphere height is 375 km. The ionospheric parameters of this model is updated every 2 h.
-
(2)
GPSKlob model
This model is constructed in solar fixed geomagnetic coordination and the earth radius is 6371 km, the ionosphere height is set as 350 km and the update interval of the model parameters is 1–7 days.
2.2 BDGIM Model of BDS-3
BDGIM model is used to correct the single frequency ionospheric delay in BDS-3 which is based on the improved spherical harmonic function [3, 4]. Users calculate the ionospheric delay corrections according to the following steps.
Where \( I_{ion} \) is the ionospheric delay correction (meters) in the line of sight from the satellite to the receiver. \( M_{F} \) is the projection function used to transform between the total electron content of the vertical and slant direction. \( f \), in Hertz, is the carrier frequency of the current signal. \( \alpha_{i} \left( {i = 1,9} \right) \) are the ionospheric model parameters of BDGIM with units being TECu. \( A_{0} \) is the ionospheric delay prediction which calculated according to the non-broadcast ionospheric parameters stored in receivers, the location of the user’s IPP and the observation time. \( A_{i} \left( {i = 1,9} \right) \) is calculated based on the position of the user’s IPP and the observation time.
3 Evaluation of Model Accuracy
3.1 Data Description
The parameters of all the four single frequency models, BDSKlob, BDGIM, GPSKlob and NeQuickG, that broadcasted in the navigation messages in 2019 are selected from iGMAS. The ionospheric grid data released by CODE in the same time period are also obtained. The performance of BDGIM model is compared with the other three ones and the grid ionosphere data is taken as the reference.
The ionospheric delay correction, the root mean square of the ionospheric delay errors and the ionospheric delay correction ratio of each model are calculated in 2019. In addition, the variations of all the four models in different regions and time periods are also analyzed. The observation data of IGS stations are downloaded to analyze and compare the effects of different ionospheric models on SPP.
3.2 Evaluation Indexes
In this paper, root mean square (RMS) and correction ratio are used to measure the performance of single frequency ionosphere models. The RMS is defined by formula (1.3).
And the correction ratio given by (1.4) as follows,
Where \( IonD_{\bmod } \) represent the vertical ionospheric delay derived from the above four single frequency models and \( IonD_{ref} \) is vertical ionospheric delay computed based on the CODE grid data. Ionospheric delay errors are defined as the differences between the ionospheric delay of models and that of CODE data. The RMS of the errors reflects the accuracy of the models and the correction ratio intuitively shows the performance of the models.
4 Performance Analysis of BDGIM Model
4.1 Spatial Variation of BDGIM Model
In order to analyze the spatial variation of ionospheric models, the scope of latitudes from −87° to 87° and longitudes from −180° to 180° are divided into 5° × 5° grid points. The vertical ionospheric delay corrections of GNSS ionospheric models and that of CODE grid products are calculated at each grid point which are shown in Fig. 1. Figure 1 shows the vertical ionospheric delay errors of GNSS ionospheric models and Fig. 2 shows the RMS values of each model.

Vertical ionospheric delay of ionospheric models and that of CODE grid data (at 14:00 Beijing time)

RMS of ionospheric delay errors of GNSS models at March of 2019

VTECs of different ionospheric models at the position of (lat = 20, lon = 110) in day March 6, 2019
Figure 2 shows the mean RMS of ionospheric delay error in global range using the data of March 2019. From Fig. 3, it can be concluded that:
-
BDSKlob model has better correction accuracy in the Asia Pacific region and China. There is an obvious abnormal region in the Southern hemisphere, and the correction accuracy in high latitude region is low.
-
BDGIM model has the smallest average RMS among all of the four models. The results in Northern hemisphere is obviously better than that in the Southern. The RMS in high latitudes of Southern hemisphere is getting worse, but no more than 9TECu. This may be related to the fact that BDGIM model is mainly modeled based on the observation data of monitoring stations located in China’s region.
-
GPSKlob model behaves better in low latitude area, and the change of RMS in the middle and high latitude areas are relatively stable which the RMS value is basically not more than 10TECu.
-
The precision of NeQuickG model is poor in low latitude where RMS is about 10TECu while that in mid and high latitudes are better being no more than 6TECu. Therefore, this model is more suitable for the correction of ionospheric delay of mid and high latitude areas.
4.2 Time Variation of BDGIM Model
Three stations located at (Lat = 20, lon = 110), (Lat = 40, lon = 110) and (Lat = 60, lon = 110) are selected in this paper to analyze the variations of VTEC delay error of four ionospheric models in the day of March 6, 2019 with the interval of 30 s.
Figures 3, 4 and 5 respectively show the change of VTEC of GNSS ionosphere models and that of CODE grid of March 6, 2019. It can be concluded from the figures that:

VTECs of different ionospheric models at the position of (lat = 40, lon = 110) in day March 6, 2019

VTECs of different ionospheric models at the position of (lat = 60, lon = 110) in day March 6, 2019
-
The VTEC of all the ionospheric models change violently in daytime and gently in night which also coincides with the high solar radiation and violent ionospheric activities in daytime near the equator.
-
BDGIM and GPSKlob models are well agree with that of CODE grid in low latitude region especially in daytime. And NeQuick model overestimates the ionospheric delay in daytime.
-
BDSKlob and GPSKlob beome obviously worse in the mid and high latitudes which overestimates the ionospheric delay during the daytime.
-
Overall speaking, BDGIM model is well consistent with that of CODE grid which is better than GPSKlob and BDSKlob models in high latitude area.
4.3 Performance Evaluation of BDGIM
In order to further analyze the influence of time and space on the performance of BDGIM model, the Southern and Northern hemispheres (high, mid and low latitudes), China region (longitude 70°–145°, latitude 7.5°–55°) and the global scope are divided into grids at 5° × 2.5° intervals. The correction ratio and RMS of each grid point in daytime (8:00–20:00) and night (20:00–8:00) are calculated. The BDGIM model is compared with the others three models. Table 1 lists the statistical results.
Figure 6 show the change of globally averaged RMS of BDGIM, BDSKlob, GPSKlob and NeQuickG models during 2019. Figure 7 show the changes of globally averaged correction ratio the GNSS models in the same time period.

Mean RMS of BDGIM/BDSKlob/ NeQuickG/GPSKlob models in day and night of 2019 globally

Correction ratio of BDGIM/BDSKlob/NeQuickG/GPSKlob models in day and night of 2019 globally
According to the results of Table 1 and Figs. 6 and 7, it can be seen that:
-
It is verified that the accuracy of BDGIM model is slightly worse than that of NeQuickG model in the high latitude areas of the Northern and Southern hemispheres. However, the RMS of BDGIM model in other areas demonstrate that its good performance where RMS is less than 6TECu.
-
The performance of BDGIM model at night is better than that of GPSKlob and BDSKlob.
-
BDGIM model performs better in daytime than in night, superior in spring and autumn and a little inferior in summer and winter. This is related to the intense solar activities in spring and autumn.
-
The accuracy of BDSKlob model is basically the same in daytime and night, while that of GPSKlob model fluctuates greatly in daytime and gently at night. The precision of NeQuickG model has the same trend in daytime and night and there is a deviation of about 2TECu between them.
From the statistics of corrected ratio, we can see that:
-
BDGIM model is better than the other three models over China area and the correction ratio is better than 78%. This model is equivalent to NeQuickG model and the correction ratio is better than 63% in global area.
-
The correction ratio of BDSKlob model is superior than 71% in China and 57% in the world. The correction ratio in daytime is 25% higher than that in night.
-
The correction ratio of BDGIM model in spring and autumn is better than that in summer and winter. The correction ratio of BDSKlob model is poor in summer and well in spring and winter. The correction ratio of GPSKlob model and NeQuickG model in spring and winter is basically the same in daytime and night and the correction ratio of summer and autumn is 20 and 10% higher in daytime than that in night.
4.4 Impacts of BDGIM Model on Positioning
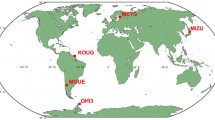
In order to analyze the influence of different ionospheric models on single point positioning (SPP), the observation data of six IGS stations distributed at high, mid and low latitudes of the Northern hemisphere from July 1 to 10, 2019 are selected as the testing data. Excluding the ionospheric delay, the other errors in the pseudoranges are corrected in the same way. The three-dimensional accuracy of SPP results with the four different ionospheric models correcting ionospheric delay is calculated and analyzed respectively.
The IGS stations of HARB and CHAN locate in high latitude area of the northern hemisphere, and BJFS and JFNG in the mid latitudes, and HKWS and SIN1 in the low latitudes.
The positioning results with different ionospheric models in different latitudes are shown respectively in Figs. 8, 9, 10, 11, 12 and 13. The positioning accuracy of BDGIM model in different latitudes of the Northern hemisphere is superior than that of the other models. And the positioning accuracy with NeQuickG in high latitudes is the best, especially for the station of HARB.

Different ionospheric positioning results of CHAN in high latitude of north latitude

Different ionospheric positioning results of HARB in high latitude of north latitude

Different ionospheric positioning results of BJFS in mid latitude of north latitude

Different ionospheric positioning results of JFNG in mid latitude of north latitude

Different ionospheric positioning results of SIN1 in low latitude of north latitude

Different ionospheric positioning results of HKWS in low latitude of north latitude
Table 2 lists the statistical values of positioning results of different ionospheric models on July 6, 2019. From these figures, it can be concluded that the three-dimensional positioning accuracy of BDGIM model in the Northern hemisphere is better than 1.6 m. However, the performance of BDSKlob model in high latitude area decreases and the positioning accuracy of HARB station even reach up to 2.7 m. The positioning accuracy of SIN1 station near the equator with different ionosphere models is worse than that of the other stations that in mid and high latitude area. This may be relative to the severe activities of ionosphere on the equator area.
Compared with GPSKlob model, BDGIM model promotes the positioning accuracy in high and low latitudes by 46% and 33%. And an improvement of 48% and 39% when compared with BDSKlob model and a decrease of 8% and improvement of 26% with respect to NeQuickG model in low and high latitudes. This indirectly verifies the correctness of the above conclusions.
5 Conclusions
Compared with other ionospheric models, BDGIM model shows the improvement in both coverage and performance especially for the high latitude region. Except for the high latitude of Southern hemisphere, the precision of BDGIM model is better than the other models. The correction ratio of BDGIM model reaches up to 78% over China and 63% in the world. With BDSKlob model correcting the ionospheric delay for SPP is better than with BDSKlob model, especially in high latitude areas.
At present, BDGIM model is determined mainly with the observation data from stations in China. Therefore, its accuracy is relatively poor in the southern hemisphere, especially the high latitude area. It can be expected that with the development of BDS-3, there will be more observation data and the performance of BDGIM model will be promoted in future.
References
Xie, G.: Principles of GNSS-GPS, GLONASS and Galileo. Electronic Industry Press, Beijing (2013)
Peng, T.: Performance evaluation and influence factors analysis of broadcast ionospheric model. Ph.D. thesis of Changan University (2018)
Zhou, R.: Preliminary analysis of the service performance of Beidou experimental satellite system. Ph.D. thesis of Wuhan University (2018)
Chen, X.: Research and discussion on algorithm of ionospheric delay correction model. Ph.D. thesis of Changan University (2017)
Chen, N.: Study on methods of precision monitoring and assessment of broadcast ionospheric model of GNSS. Changan University (2015)
Liu, S.: Correction accuracy evaluation and analysis for GNSS ionosphere model. Space Sci. 36(3), 298–299 (2016)
Zhang, Q., Zhao, Q.: Research on BeiDou navigation satellite system ionospheric model accuracy. In: The 4th China Satellite Navigation Conference
Zhang, Q., Wang, Y.: Initial assessment of BDS broadcast ionospheric parameters accuracy. J. Navigat. Position. 3(2), 16–18 (2015)
Liu, C., Wang, W.: A study on performance of ionospheric grid information of BDS. GNSS World China 44(5), 85–90 (2019)
Chen, N., Jia, X.: Precision assessment of broadcast ionospheric model of compass system based on improved CODE model. In: The 5th China Satellite Navigation Conference
Sun, M., Yu, J.: Correction accuracy analysis on ionospheric model of beidou system. J. Geomat. Sci. Technol. 32(1), 27–31 (2015)
Zhang, H., Ping, J.: Brief review of the ionospheric delay models. Progr. Astron. 24(1), 17–25 (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Guo, M., Fan, Y., Fan, X., Sun, G., Zhen, J., Zhai, W. (2020). Performance Analysis of BDGIM. In: Sun, J., Yang, C., Xie, J. (eds) China Satellite Navigation Conference (CSNC) 2020 Proceedings: Volume III. CSNC 2020. Lecture Notes in Electrical Engineering, vol 652. Springer, Singapore. https://doi.org/10.1007/978-981-15-3715-8_10
Download citation
DOI: https://doi.org/10.1007/978-981-15-3715-8_10
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-3714-1
Online ISBN: 978-981-15-3715-8
eBook Packages: EngineeringEngineering (R0)