
Abstract
In today’s world, we keep moving in different network zones and thus our signal strength keeps on varying. Our mobile equipment keeps shifting various base station areas, and thus, the signal strength keeps fluctuating. As we cannot stop this movement, we need to make sure that there is no data lost in this process. The movement of mobile devices in alternating networks can result in handoff, and thus, we need an efficient technique to control it and contain it completely. Handoff can be of various types, and thus, we need different methods to tackle with it. With this, we compare various handoff control processes and propose a fuzzy controller so as to minimize the handoff in various devices.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The process of shifting a current call or data session from one channel to another is called handoff. Handoff control is an important process as it helps various users to be connected in a proper chain and no communication data is lost in any way. Handoff can result in quality of service (QOS) degradation and call dropping. Handoff occurs when a cluster of networks are in contact with each other in a dedicated network. To manage various handoff processes, we need to measure certain signal parameters which help us to determine what technique to be adopted for its control. Some of these parameters include received signal strength indication (RSSI), quality indicator (QI), and word error indicator (WEI). Fading largely affects the RSSI value, and hence, some steps should be taken to adequately manage fading. Handoff needs to be correctly detected so that we can do something about it. The network-controlled handoff (NCHO), mobile-controlled handoff (MCHO), and mobile-assisted handoff (MAHO) are some schemes which are used to do the detection.
The MAHO procedure is the most advanced one in soft handoff as it allows the mobile station to simultaneously connect to the old and new base stations at the same time. Thus, MAHO finds a use in most of the applications which are related to handoff and its control. In this paper, we have presented a fuzzy-based system to control handoff and conduct its measurements. We have taken signal-to-interference ratio (SIR), traffic delay (TD), and velocity of mobile user as input. The output parameters which have been defined are RSS (threshold) and RSS (hysteresis). We have created a rule base for this system and thus established certain conclusions based on the output we get. According to the pre-defined logic, we choose the values of SIR, TD, and velocity for which there is minimum threshold and the received signal strength is the highest. Fuzzy inference systems are easy to implement and have a high runtime.
2 Literature Survey
Handoff control using fuzzy logic can be implemented easily using a fuzzy inference system (FIS) and defining input and output parameters with the correct rule base. We can define parameters like signal-to-interference ratio (SIR), traffic difference (TR), and velocity of mobile station and thus set some rules such as we get a proper plot over a wide range of values. We can change the input selection parameters to received power, traffic density, and user bandwidth and similarly create another FIS to establish the required relationship [1]. Processes which are based on packet loss reduction and containing call-blocking probability are also highly recommended, and adoption of such fuzzy-based systems can help in reducing the overall cost and time of developing complex systems [2]. Algorithms which are based on distance to various base stations can also be considered so that we can get an approximate threshold range above which handover will occur [3]. The only issue with this technique is that we only focus on a particular parameter and other values like RSSI and fading are not considered and so it might just turn out to be a temporary solution. Another advanced technique in terms of fuzzy logic is the predictive handoff technique in microcellular systems. It uses the current sample values to predict the future value and thus define a relationship between the values and when the handoff is necessary [4]. As we know soft handoff permits a handoff delay which is dependent on the dwell time, we can analyze neuro-fuzzy services which can tolerate delays. Integrated voice and data calls can be used for this process in a code-division multiple access (CDMA) network, and this different hierarchy reservation and queuing schemes can be adopted accordingly [5]. The advantage of such a technique is that it uses a back propagation training method to train the controller and thus the output accuracy would be the greatest. A two-stage handoff control process has also been developed where the primary stage determines and manages the handoff using fuzzy logic input parameters of RSSI and distance from base station (BS) and the secondary stage uses the past sample values to predict the future trends and thus efficiently use this information [6, 7]. This process would be a combination of the previously mentioned processes and thus turns out to be the ideal one.
Controlling the handover in heterogeneous networks is also a tough task, and thus, there has been some development in this domain as well. It involves in assigning an exact time to initiate the handoff procedure which helps in decreasing call dropping [8]. Different membership functions also help us in various different ways. The triangular membership function used in a fuzzy inference system is helpful when the call blocking is a serious issue.
Defuzzification methods include center of gravity and sum of areas, but these methods do not usually give the exact values. The defuzzification process helps use in obtaining specific values and thus provides more detailed handoff features.
3 Method
Fuzzy logic makes use of our knowledge by providing the fuzzy decisions of a defined platform. The widely used fuzzy systems are pure FLS, Takagi, Sugeno fuzzy system, and Mamdani fuzzy system. The components of the FLS described by Mamdani are fuzzification, fuzzy rule base, fuzzy inference engine, and defuzzification. This style of the FLS has been widely used in various applications and known products (Fig. 1).

Fuzzy logic system
We use this configuration as it has many benefits over the other FLS. It has real variables for input and output parameters, and that is necessary for many applications where fuzzy parameters do not work. It provides a IF-ELSE rule base which helps in assisting in most of the causes. It has many degrees of freedom.
4 Implementation
The concept of fuzzy logic-based handoff algorithm is to aggregate important qualities of current techniques to get an adequate algorithm and to get used to the parameters of this algorithm to the fuzzy environment using a fuzzy logic system. A fuzzy logic rule base is made using the known sensitivity of handoff algorithm parameters (RSS threshold and RSS hysteresis). All the input variables are given to one of the three fuzzy sets, “High,” “Normal,” or “Low.” All the output variables are given to one of the seven fuzzy sets, “Highest,” “Higher,” “High,” “Normal,” “Low,” “Lower,” or “Lowest” (Fig. 2).

Implementation
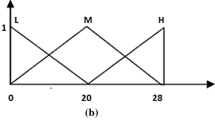
We have defined the membership functions for the three input parameters and two output parameters in the following tables. For instance, consider the input parameter SIR. It is defined from 14 to 22 dB. The “High” for the SIR is set from 18 to 22 dB with the maximum membership at 22 dB. Similarly, “Normal” for the SIR is set from 14 to 22 dB with the maximum membership at 18 dB, and “Low” for then SIR is defined from 14 to 18 dB with the maximum membership at 14 dB. We have done the same for the other parameters. These defined values are user-based and are not specific. They can vary in different environments and conditions depending on various factors (Figs. 3 and 4).

Membership functions of three input parameters

Membership functions of two output parameters
The degrees of freedom for all variables are centers of the Gaussian membership functions and spreads of the membership functions. Moreover, the addition of more fuzzy sets in a given fuzzy inference system can give better results and higher accuracy. To ensure the low complexity of the rule base, each input fuzzy variable was distinguished into three fuzzy sets. Output fuzzy variable was separated into seven regions so that the correct weight can be provided to the various combinations of the input sets (Fig. 5).

Mamdani fuzzy inference system
The fuzzy rule base consists of 27 rules which are set as per the user considering three fuzzy inputs and two fuzzy outputs. They can be amended as per the requirements and are not specific or stringent for any applications.
The rules are designed using basic IF-THEN logic. For example, consider the SIR to be low; TD is high; and the velocity is high. These parameters show that the handoff should be persuaded as much as possible; this is rule 19. To make the fastest handoff, RSS threshold is increased to its highest value and the RSS hysteresis is reduced to the lowest value. If SIR is high, TD is low, and the velocity is low, handoff is prevented as much as possible. This is shown in rule 9. The concept behind the rules is that if the most of the input variables show that increasing the handoff is necessary, threshold is intensified and hysteresis is minimized. On the other hand, if the most of the input variables show that discouraging a handoff is viable, then threshold is minimized, and hysteresis is increased. The scope to which the threshold and hysteresis are altered to encourage or discourage a handoff depends on how many variables concede on a specific course of the threshold and hysteresis modification (Fig. 6).

Fuzzy rule base
The optimum weight vector W can be calculated by knowing the standard deviation “s” of the input and output parameter values stored at all the user base stations.
Using these values of standard deviation, we can calculate the weight vectors using the following equation:
where i = 1–3 (3 input parameters)
Fuzzy handoff decision vector can be thus calculated using the weight vector(W) and the membership function vector (U) using the given equation:
Similarly, we calculate the weight vectors for output parameters, and then, using this, calculate the fuzzy handoff decision vector. Based on the values of the handoff vector, handoff decisions are taken.
The handoff algorithm provides the fuzzy handoff decision vector (F). From this vector F, any “m”th base station will be chosen for the handoff if and only if it satisfies the following conditions:
-
1.
The F value for this “m”th station is maximum as compared to other F values of all other stations.
$${\text{Fm}}\left( d \right) = {\text{Max}}\left\{ {F1\left( d \right),F2\left( d \right),F3\left( d \right),F4\left( d \right), \ldots Fn\left( d \right)} \right\}$$ -
2.
To eliminate unnecessary handoff, some cutoff value for the F vector is determined F(cut). The difference between the F value of the “m”th station, i.e., Fm (d) and maximum of all other F values will be collated with the fixed cutoff value of the F value F (cut). If the difference is greater than the cutoff value only, then the handoff will took place in favor of the “m”th station. This can be depicted by the following equation:
$${\text{Fm}}\left( d \right) - { \hbox{max} }\left( {F\left( d \right)} \right) \ge F\left( {\text{cut}} \right)$$
5 Results and Conclusion
The given Mamdani result below shows how by varying different input parameters we can achieve different levels of RSS threshold and RSS hysteresis. Using these parameters, we can easily find the handoff decision vector and thus evaluate when handoff should take place (Fig. 7).

Mamdani output
The process is a simple way, considering only two user base stations, BS1 and BS2. The path is assumed to be a straight one from BS1 to BS2. The fuzzy system-based handover decision algorithm aids in providing a generalized vertical handover decision process, in which different input parameters are specifically analyzed and dedicated to achieve the required handover. The algorithm can be done without any complexity through software processes or required fuzzy logic processing methods. The values of the handoff decision vector help us in determining if a particular handoff initialization is necessary or not. Thus, we can control handover between base stations by adjusting the input parameters and achieve total control using fuzzy logic.
References
Dang MS, Prakash A, Anvekar DK, Kapoor D, Shorey R (2000) Fuzzy logic based handoff in wireless networks. VTC2000-Spring. In: 2000 IEEE 51st vehicular technology conference proceedings (Cat. No. 00CH37026), May 2000
Saha S, Mukherjee M, Neogy S (2007) FHMS: fuzzy logic-based handoff management scheme for wireless network. In: 15th international conference on advanced computing and communications (ADCOM 2007), Dec 2007
McGuire M, Bhargava VK A robust fuzzy logic handoff algorithm. CCECE’97. In: Conference proceedings of Canadian conference on electrical and computer engineering. engineering innovation: voyage of discovery
Edwards G, Sankar R A predictive fuzzy algorithm for high performance microcellular handoff. GLOBECOM 97. In: Conference record IEEE global telecommunications conference
Sindal R, Tokekar S (2009) A neuro-fuzzy call admission control algorithm for voice/data traffic in CDMA cellular network. IEEE international advance computing conference, Mar 2009
Edwards G, Sankar R Hand-off using fuzzy logic. In: Proceedings of GLOBECOM’95
Jain S, Rana V Fuzzy logic in mobile handoff decision. J Inf Knowl Rese Comput Eng
Fayyazi H, Sabokrou M An evolvable fuzzy logic system for handoff management in heterogeneous wireless networks
Acknowledgements
This technical paper was greatly supported by Prof. Shivani Bhattcharjee. Her appropriate mentoring and total guidance helped us at every stage of this project, and this paper would not have been possible without her valuable contributions. We thank our colleagues who provided insight and expertise that greatly contributed to the research and helped us with the entire process.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Gokani, V., Kashyap, A., Bhattacharjee, S. (2020). Handoff Control Using Fuzzy Logic. In: Vasudevan, H., Gajic, Z., Deshmukh, A. (eds) Proceedings of International Conference on Wireless Communication . Lecture Notes on Data Engineering and Communications Technologies, vol 36. Springer, Singapore. https://doi.org/10.1007/978-981-15-1002-1_36
Download citation
DOI: https://doi.org/10.1007/978-981-15-1002-1_36
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-1001-4
Online ISBN: 978-981-15-1002-1
eBook Packages: EngineeringEngineering (R0)