
Abstract
Legged mobile lander (LML) possesses both landing and walking functions with the promising application prospect in extraterrestrial exploration. There are three challenges on the dimensional synthesis method for the LML, including the derivation of the performance criteria for both landing and walking behaviors, the establishment of the dimensional optimization design model, and the demonstration and expression method for dimensional synthesis. To solve these problems, the paper will firstly introduce the mechanism topology of the proposed Chang’e-Type LML; then, derive the optimization parameters and the optimization criteria; thereafter, implement the non-dimensional optimization process for both single leg and overall robot respectively by the performance atlas approach; finally, obtain the dimensional global optimum solution. The study can help one understand the relationship between different dimensions and the corresponding performances, and obtain the global optimum dimensions for the Chang’e-Type LML.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Recently, extraterrestrial exploration has become a hot topic, and many schemes for the exploration system are proposed by academic institutes, commercial organizations, and aerospace agencies. The lander carrying with the rover is recognized as a conventional method applied among different nations, such as American’s Apollo Project (1969–1972) [1], Soviet/Russian’s LK Lunar Craft Program (1970–1971) [2], Chinese Chang’e 3 & 4 Program (2013–2019) [3] and so on. On the other hand, the mobile landing exploration robot is proposed with both landing and walking functions, which is also designed with complicated mechanism and structure, such as the robotic and crewed centaur lander by Lockheed Martin [4], the Mars cargo lander by Boeing Company [5], the wheel-legged mobile manned lunar lander by China Academy of Space Technology [6] and so on. In this paper, we propose a new legged mobile lander (LML) with the similar mechanism topology of Chang’e 3 & 4 lunar lander, and commit to implement the dimensional synthesis of the Chang’e-Type LML with the best landing and walking performances.
As shown in the previous researches [7,8,9], the structural design method is widely used for the past legged landers, which takes the lander as truss structure with buffering characteristics, then investigates the structural strength, reliability, finite element analysis, etc. All that matters is there is not a cogent approach to determine the preliminary dimensions of the truss structure, which depends on the experience and intuition of designers. Moreover, the evaluation indices for both landing and walking behaviors are not sufficient and reasonable at present. Most criteria are suited to the analysis or test process rather than the design process, such as the four statistical landing performance criteria used in Apollo Project [10] and the five comprehensive evaluation indices used in Chang’e 3 Program [7] are all applied in landing tests. Furthermore, the demonstration and expression method for dimensional synthesis is of vital importance as well. For a long time, the cost function approach is widely used by the multi-object numerical algorithm, for instance, Wu et al. [11] utilize the second generation of non-inferior sorting genetic algorithm to optimize the legged lander with multiple objections. However, this approach is easy to get a local optimum solution, or else it requires more computing time and effort to get the global optimum solution. Furthermore, it’s still not perceptual to compare different solutions by visualization, and the designers don’t know the optimal degree of optimization results.
In conclusion, there is almost no directly feasible method for the dimensional synthesis of the LML at present. Hence, the paper is structured as follows: Step 1, introduces the mechanism topology of the proposed Chang’e-Type LML; Step 2, derives the optimization parameters and the optimization criteria; Step 3, demonstrates the non-dimensional optimization process of both single leg and overall robot respectively with the performance-chart based design methodology (PCbDM); Step 4, obtains the dimensional global optimum solution of the Chang’e-Type LML.
2 Structure and Optimization Criteria
2.1 Structure and Mechanism
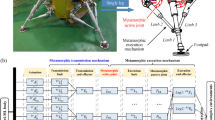
Figure 1 shows the structure and mechanism of the LML among different stages. The LML contains one main body and four legs with both landing and walking functions. Each limb in the leg includes one actuation sleeve, one damper sleeve, and one damper piston. Their coupling relationships are illustrated in the figure detailedly, where \( {\text{U}} \) denotes the universal hinge, \( {\text{S}} \) denotes the spherical hinge, \( \underline{{\rm P}} \) denotes the prismatic hinge between the actuation sleeve and the damper sleeve, while \( \overline{\text{P}} \) denotes the equivalent prismatic hinge for the damper when it’s shortened or stretched by landing impact. In pre-landing stage, the LML can be seen as a truss structure with zero mobility. In landing stage, the damper in main limb is shortened while the damper in secondary limb is both possible to be shortened or stretched under different landing conditions, so the single leg is recognized as the hybrid mechanism \( \left( {2{\text{U}\overline{\text{P}}\text{S}}\& U} \right) - {\overline{\text{P}}} \) with 2R1T motion characteristics. In walking stage, all dampers are fixed with constant lengths. The damper sleeve is actuated by the actuation sleeve, so the single leg is recognized as the parallel mechanism \( 2{\text{U}}\underline{{\rm P}} {{\rm S}}\& U\underline{{\rm P}} \) with 2R1T motion characteristics.

Structure and mechanism of the LML among different stages
In this figure, \( l_{1} + l_{3} \) represents the length of main limb, \( l_{2} \) and \( l_{4} \) represent two secondary limbs. For the single leg, the static platform isosceles triangle \( \Delta {\text{U}}_{1} {\text{U}}_{2} {\text{U}}_{3} \) is similar to the moving platform isosceles triangle \( \Delta {\text{AS}}_{2} {\text{S}}_{3} \), their bottom edges are \( \left| {{\text{U}}_{2} {\text{U}}_{3} } \right| = 2a_{1} \) and \( \left| {{\text{S}}_{2} {\text{S}}_{3} } \right| = 2a_{2} \), heights are \( b_{1} \) and \( b_{2} \). Moreover, the main body is a \( 2d \times 2d \times d \) cuboid, \( \theta_{in} \) is the installation angle between single leg and main body.
There are five optimization parameters for the single leg, including \( a_{1} ,b_{1} ,a_{2} ,b_{2} ,l_{3} \), and three optimization parameters for the overall robot, including \( l_{3} ,R_{ms} ,R_{sp} \), where \( R_{ms} \) represents the distance between the main body axis and the main strut universal hinge, which can be considered as the radius of the moving platform of the LML, \( R_{ms} = d + b_{1} sin\theta_{in} \); \( R_{sp} \) represents the radius of the circle formed by four footpads, which can also be considered as the radius of the static platform of the LML.
2.2 Optimization Criteria
There are five performance indices for evaluating the landing and walking behaviors of the LML shown in Table 1, where “★” denotes the index is appropriate for the single leg or overall robot. Among them, the first four indices are based on the works by Gosselin, and Liu, etc. [12, 13], while the fifth index is first put forward based on the work by Papadopoulos [14].
In the table, the workspace volume index (WVI) represents the buffering extent and ability and is the basis to establish all other performances; the global conditioning index (GCI) evaluates the dexterity, isotropy and the ability away from singularity; the global payload index (GPI) evaluates the extremum of the force or moment in landing and walking stages; the global stiffness index (GSI) evaluates the linear and angular displacement deformation; the global landing stability index (GLSI) evaluates both horizontal and vertical stabilities to make the landing or walking stage secure. Furthermore, we hope a bigger WVI, bigger GCIs, bigger GPIs, smaller GSIs and bigger GLSI for the LML as the best multi-objective performances. In the following, to balance all these performance criteria, we’ll transform the multi-objective optimization problem into the single-objective optimization problem to implement the dimensional synthesis process.
3 Non-dimensional Optimization of the Single Leg
For the single leg, the dimensional synthesis problem can be abstracted into the dimensional optimization design model as follows:
where \( \tilde{\eta }_{i} \) \( \left( {i \in \left[ {1,6} \right]} \right) \) is the normalization form of \( \eta_{i} \), and \( \tilde{\eta }_{i} \in \left[ {0,1} \right] \); \( m_{i} \) is the effective weighting factor of \( \tilde{\eta }_{i} \) to construct the single-objective optimization problem, and \( \sum m_{i} = 1 \). Moreover, the constraint conditions are the angle ranges of \( \beta_{ji} ,\gamma_{ji} ,\xi_{ji} \) for universal and spherical hinges, and the lengths ranges of \( l_{ji} \) for dampers.
Based on the PCbDM method, the normalized equation can be obtained by:
where \( r_{1} = l_{3} /R \), \( r_{2} = b_{1} /R \), \( r_{3} = b_{2} /R \), \( r_{4} = a_{1} /R \), \( r_{5} = a_{2} /R \), and \( R \) is the normalization factor. Considering that the low DOF parallel mechanism usually owns the geometrically similar static platform and moving platform to get better performances [15], hereby we let \( r_{4} /r_{2} = r_{5} /r_{3} = \chi \), and assign \( \chi = 1.5 \) on account of the supporting stiffness and landing stability. Equation (11) indicates the parameter design space, which is illustrated in Fig. 2 by the rectangular pyramid \( ABCDE \).

Parameter design space of the single leg
Figure 3 shows the comprehensive performance atlas of the single leg, where \( m_{1} ,m_{2} ,m_{4} ,m_{5} = 0.2 \), and \( m_{3} ,m_{6} = 0.1 \). One can see that: (1) the comprehensive performance in the design space is almost inversely proportional to \( r_{3} \) when \( r_{1} \) is specified, which means the dimensions of the moving platform of the single leg should be smaller than that of the static platform; (2) for the single leg with the best comprehensive performance, the optimum solution region is \( \varOmega_{LEG} = \left\{ {\left( {r_{1} ,r_{2} ,r_{3} } \right)|2.0 < r_{1} < 3.5, 0.6 < r_{2} < 1.2, 0 < r_{3} < 0.4} \right\} \).

Comprehensive performance atlas of the single leg
Table 2 gives the numerical analysis for the multi-objective performances of the single leg, and lists ten different dimension combinations and the corresponding performances in \( \varOmega_{LEG} \). For the reason that there is not an unique optimum solution for the multi-objective optimization problem, and it relies on the designer to decide the importance degree of different performance indices. By contrast, we determine to choose No. 8 as the optimum non-dimensional parameters for the following investigation, to get a better landing and walking performances.
4 Non-dimensional Optimization of the Overall Robot
For the overall robot, the dimensional synthesis problem can be abstracted into the dimensional optimization design model as follows:
where \( \tilde{\eta }_{i} \) \( \left( {i \in \left[ {1,12} \right]} \right) \) is the normalization form of \( \eta_{i} \), and \( \tilde{\eta }_{i} \in \left[ {0,1} \right] \); \( n_{i} \) is the effective weighting factor of \( \tilde{\eta }_{i} \) to construct the single-objective optimization problem, and \( \sum {n_{i} = 1} \). Moreover, the constraint conditions are the landing stability constraints in both horizontal and vertical directions, the angle ranges of \( \beta_{ji} ,\gamma_{ji} ,\xi_{ji} \) for universal and spherical hinges, the lengths ranges of \( L_{ji} \) for actuators, where \( L_{v} \) is the distance between the engine nozzle skirt and the extraterrestrial surface, \( L_{h} \) is the distance between the main body axis and the connecting line of two adjacent footpads, \( \left[ {L_{v} } \right] \) and \( \left[ {L_{h} } \right] \) are the minimum value of \( L_{v} \) and \( L_{h} \) that ensure the LML secure.
Based on the PCbDM method, the normalized equation can be obtained by:
where \( t_{1} = l_{3} /T \), \( t_{2} = R_{ms} /T \), \( t_{3} = R_{sp} /T \), and \( T \) is the normalization factor. Hence, Eq. (13) indicates the parameter design space, which is illustrated in Fig. 4 as well.

Parameter design space of the overall robot
Figure 5 shows the comprehensive performance atlas of the overall robot, where \( n_{1} ,n_{2} ,n_{3} ,n_{5} ,n_{7} ,n_{8} ,n_{10} ,n_{12} = 0.1 \), and \( n_{4} ,n_{6} ,n_{9} ,n_{11} = 0.05 \). One can see that: (1) the comprehensive performance in the design space is almost proportional to \( t_{3} \) when \( t_{1} \) or \( t_{2} \) is specified, which means \( R_{sp} \) should be bigger than \( R_{ms} \). (2) for the overall robot with the best comprehensive performance, the optimum solution region is \( \varOmega_{LML} = \left\{ {\left( {t_{1} ,t_{2} ,t_{3} } \right)|0.4 < t_{1} < 1.6, 0 < t_{2} < 1.1, 1.3 < t_{3} < 1.5} \right\} \).

Comprehensive performance atlas of the overall robot
Table 3 gives the numerical analysis for the multi-objective performances of the overall robot, and lists thirteen different dimension combinations and the corresponding performances in \( \varOmega_{LML} \). By contrast, we determine to choose No. 2 as the optimum non-dimensional parameters, to get a better landing and walking performance.
5 Dimensional Global Optimum Solution
Given in the stowed stage, the LML should meet the envelope demand of the carrying vehicle, that is to say, the diameter of the LML should be less than the envelope diameter \( \phi_{e} \) of the carrying vehicle, given by:
According to the equation \( d = R_{ms} - b_{1} sin\theta_{in} \) and the non-dimensional parameters solved in Sects. 3 and 4, we can deduce \( 2\sqrt 2 d < \phi_{e} \). Here we take \( \phi_{e} = 3650\,{\text{mm}} \) in reference to the envelope demand of Chang’e 3 [16], and thus obtain \( d < 1290\,{\text{mm}} \), so we let \( d = 1200\,{\text{mm}} \) for the following steps. Then, the normalization factor of the overall robot can be calculated by: \( T = R_{ms} /t_{2} = 1363.64/0.9 = 1515.15\,{\text{mm}} \). So the optimum dimensional parameters of the overall robot can be obtained by: \( l_{3} = t_{1} \cdot T = 909.09{\text{mm}} \), \( R_{sp} = t_{3} \cdot T = 2272.73\,{\text{mm}} \). Next, the normalization factor of the single leg can be ensured uniquely by: \( R = l_{3} /r_{1} = 909.09/2.5 = 363.64\,{\text{mm}} \), so the optimum dimensional parameters of the single leg can be obtained by: \( b_{1} = r_{2} \cdot R = 327.27\,{\text{mm}} \), \( b_{2} = r_{3} \cdot R = 36.36\,{\text{mm}} \), \( a_{1} = b_{1} \cdot \chi = 490.91\,{\text{mm}} \), \( a_{2} = b_{2} \cdot \chi = 54.54\,{\text{mm}} \). As a consequence, all dimensional parameters of the LML are optimized with the best comprehensive performance.
6 Conclusion
The paper proposes the optimum dimension design method for the Chang’e-Type Legged Mobile Lander, establishes a reliable and comprehensive optimization design model with proper mechanism topological parameters, performance criteria and constraint conditions. The study develops a systematic strategy to optimize both single leg and overall robot respectively. Finally, the relationship between different possible dimensions and the corresponding performances is analyzed, and the global optimum dimensions for the LML are obtained. The results shown by the performance atlases are perceptual and credible.
References
Orloff, R.W.: Apollo by the Numbers: A Statistical Reference for the Manned Phase of Project Apollo (2000)
Harvey, B.: Soviet and Russian Lunar Exploration. Praxis, New York (2007). https://doi.org/10.1007/978-0-387-73976-2
Li, C., Liu, J., Ren, X., et al.: The chang’e 3 mission overview. Space Sci. Rev. 190(1–4), 85–101 (2015). https://doi.org/10.1007/s11214-014-0134-7
Birckenstaedt, B., Kutter, B.F., Zegler, F.: Centaur application to robotic and crewed lunar lander evolution. In: AIP Conference Proceedings, vol. 880, no. 1, p. 779 (2007). https://doi.org/10.1063/1.2437517
Mark, G.B.: A conceptual mars exploration vehicle architecture with chemical propulsion, near-term technology, and high modularity to enable near-term human missions to mars. In: AIAA SPACE 2015 Conference and Exposition, California, US (2015). https://doi.org/10.2514/6.2015-4611
Zhang, Z.X., Liang, L., Guo, L.L.: Concept of a wheeled-legged mobile manned lunar lander. Manned Space, 202–209 (2016). https://doi.org/10.3969/j.issn.1674-5825.2016.02.010
Yang, J.: Spacecraft Landing Buffer Mechanism. China Aerospace Publishing House, Beijing (2015)
NASA: Monte Carlo Approach to Touchdown Dynamics for Soft Lunar Landing, United States (1965)
NASA: A Mathematical Procedure for Predicting the Touchdown Dynamics of a Soft-Landing Vehicle, United States (1971)
NASA: Apollo Experience Report: Lunar Module Landing Gear Subsystem, United States (1972)
Wu, H., Wang, C., Ding, J., et al.: Soft Landing performance optimization of the new type lander based on multiple operating conditions. J. Beijing Univ. Aeronaut. Astronaut., 1–7 (2016). https://doi.org/10.13700/j.bh.1001-5965.2016.0296
Gosselin, C., Angeles, J.: A global performance index for the kinematic optimization of robotic manipulators. Trans. ASME. J. Mech. Des. 113(3), 220–226 (1991). https://doi.org/10.1115/1.2912772
Liu, X.J., Wang, J.S., Pritschow, G.: Performance atlases and optimum design of planar 5R symmetrical parallel mechanisms. Mech. Mach. Theory 41(2), 119–144 (2006). https://doi.org/10.1016/j.mechmachtheory.2005.05.003
Papadopoulos, E., Rey, D.A.: The force-angle measure of tipover stability margin for mobile manipulators. Vehicle Syst. Dyn. 33(1), 29–48 (2000). https://doi.org/10.1076/0042-3114(200001)33:1;1-5;FT029
Liu, X.J., Wang, J.: A new methodology for optimal kinematic design of parallel mechanisms. Mech. Mach. Theory (2007). https://doi.org/10.1016/j.mechmachtheory.2006.08.002
Sun, Z., Zhang, T., Zhang, H., et al.: Technical design and achievements of Chang’e-3 probe. China Sci. Technol. Sci. (04), 331–343 (2014). https://doi.org/10.1360/092014-37
Acknowledgments
The author thanks the financial support under the projects from the National Natural Science Foundation of China (Grant No. 51735009) and the Research Fund of State Key Lab of MSV, China (Grant No. MSV-ZD-2016-08).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Han, Y., Guo, W. (2020). Dimensional Synthesis for the Chang’e-Type Legged Mobile Lander Based on Performance Atlas. In: Wang, D., Petuya, V., Chen, Y., Yu, S. (eds) Recent Advances in Mechanisms, Transmissions and Applications. MeTrApp 2019. Mechanisms and Machine Science, vol 79. Springer, Singapore. https://doi.org/10.1007/978-981-15-0142-5_44
Download citation
DOI: https://doi.org/10.1007/978-981-15-0142-5_44
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-0141-8
Online ISBN: 978-981-15-0142-5
eBook Packages: EngineeringEngineering (R0)