
Abstract
The paper presents a novel uncoupled rotational parallel mechanism with two degrees of freedom (DOFs), which consists of a moving platform connected to a fixed base by two kinematical limbs. Based on the position and orientation characteristics method, kinematic output characteristics and mobility of the mechanism are analyzed and calculated. Mathematical models of the orientation and angular velocity of the mechanism are established in terms of the actuated wrench screw theory and the closed vector approach. Singularity analysis is performed in terms of the linear dependence of the kinematic screw system and constraint screw system, respectively, and all singular configurations are given as well.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
According to the differences of output motion characteristics of the moving platform, parallel mechanism can be divided into pure translational [1], pure rotational [2, 3] and hybrid types [4, 5]. Among them, the moving platform of the pure rotational parallel mechanism with two or three degrees of freedom can change the posture of the object in space to obtain the expected motion.
Generally, parallel mechanisms have strong motion coupling, which is beneficial to improve the rigidity and load carrying capacity of the mechanism, and which also causes some problems such as small working space, complex kinematics, and difficult control design. Therefore, decoupled parallel mechanism has become one of the hot spots in this field [6,7,8]. Uncoupled parallel mechanism is one special type during the decoupling parallel mechanisms. Its input-output motion has a one-to-one control relationship, which makes the kinematics and dynamic equations very simple and the control design is very easy. Xu [9] proposed two conditions for the full decoupling of two rotational DOFs of 2R1T and 2R PMs with three branches, including a just constraint branch. Jin [10] designed the 2T2R and 3T2R parallel mechanisms with large decoupled output rotational angles by using Lie group theory, and analyzed the fixed posture working space and posture space of the mechanism. Zhang [11] proposed an uncoupled 2T1R parallel mechanism and discussed its kinematic isotropic condition. This paper proposes a novel uncoupled two-rotational parallel mechanism. Kinematic problems and singular configurations of the mechanism are studied in detail.
2 Structural Design and Output Characteristics Analysis
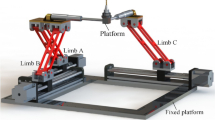
The novel parallel mechanism is shown in Fig. 1, which consists of a moving platform, a fixed base and two single open chains connected to two platforms. The arrangement of the first limb from the base to the platform is followed by rotational joint R11, universal joint U12, prismatic pair P13, and universal joint U14. In order to facilitate structural description of the mechanism, two universal joints U12 and U14 are replaced by rotational joint R12 and R13, and rotational joints R15 and R16, respectively.

Diagram of RR-RUPU parallel mechanism
In the first kinematic chain, axes of the joints R11 and R12 are parallel to each other, axes of the joints R13 and R15 are parallel to each other and perpendicular to the motion direction of the prismatic pair P13. So the first chain can be recorded as
 . The arrangement of the second limb from the base to the platform is rotational joints R21 and R22 in sequence and their axes intersect perpendicularly. This chain can also be recorded as \( {\text{SOC}}\left\{ - \right.{\text{R}}_{21} \bot {\text{R}}_{22} \left. - \right\} \). The assembling conditions of the two limbs are as follows: the axes of joints connected to the base are perpendicular to each other, and the axes of joints attached to the platform are parallel. The first revolute joint in each limb is selected as the actuated joint. The position and orientation characteristic sets Mb1 and Mb2 of the first and the second limbs can be written out, respectively, and have
. The arrangement of the second limb from the base to the platform is rotational joints R21 and R22 in sequence and their axes intersect perpendicularly. This chain can also be recorded as \( {\text{SOC}}\left\{ - \right.{\text{R}}_{21} \bot {\text{R}}_{22} \left. - \right\} \). The assembling conditions of the two limbs are as follows: the axes of joints connected to the base are perpendicular to each other, and the axes of joints attached to the platform are parallel. The first revolute joint in each limb is selected as the actuated joint. The position and orientation characteristic sets Mb1 and Mb2 of the first and the second limbs can be written out, respectively, and have
where, the right superscript numerals denote the characteristic degree of freedom (DOF) of the limb. For example, \( r^{2} / /\left( {R_{15} ,R_{16} } \right) \) denotes that there are two rotational DOFs in the plane determined by the axes of R15 and R16, and \( t^{0} \) denotes that the number of translational DOF is 0. Therefore, the position and orientation characteristic set of the mechanism shown in Fig. 1 is as follows
Formula (3) shows that the platform has only two-dimensional rotational DOFs rotating around the axes of the joints R21 and R22. It is obvious that there is without any independently translational mobility for the mechanism.
The DOF of the parallel mechanism can be calculated by Eq. (4), and
where, F is the DOF of the mechanism; m is the number of joints, \( f_{i} \) is the DOF of the ith joint, \( v \) is the number of independent loops, \( \xi_{j} \) is the number of independent displacement equations of the jth loop. For the mechanism shown in Fig. 1, m = 8, υ = 1, \( \xi_{1} \) = 6, so we get F = 2. The calculation result is consistent with the previous analysis, i.e., the mechanism only has two rotational DOFs in space.
3 Kinematic Analysis of the Mechanism
3.1 Orientation Analysis
Three-dimensional CAD model of the parallel mechanism is shown in Fig. 2. The fixed coordinate system \( O - xyz \) is attached on the base. Origin point O is located at the intersection of two rotational joints of the second limb, z-axis coincides with the axis of joint R21, and x-axis is parallel to the axis of joint R11. The moving coordinate system \( P - uvw \) is fixed on the platform, its origin point P coincides with the point O, v-axis coincides with the axis of joint R22 and w-axis is perpendicular to the platform. At the initial configuration, the axes of the two coordinate systems coincide with each other. Let \( q_{11} \) and \( q_{21} \) be the input angular displacement of the two actuated joints R11 and R21, respectively. \( \alpha \) and \( \beta \) are the orientation angles of the platform rotating around the v-axis and the z-axis. \( \beta \) is the length of the active rod in the first limb, \( r \) represents the size of the platform structure, which is measured between joints R16 and R22.

CAD model of the novel parallel mechanism
The local coordinate system \( O_{1} - x_{1} y_{1} z_{1} \) is fixed on the base. Its origin point \( O_{1} \) lies on the axis of joint R11 and x1 axis coincides with it. \( z_{1} \) axis is perpendicular to the platform, as shown in Fig. 2.
The kinematic screw system of the first limb in system \( O_{1} - x_{1} y_{1} z_{1} \) is written as

where, \( L_{ij} \) and \( M_{ij} \) are the direction vector parameters of screw
 corresponding to the jth joint in the ith chain, \( P_{ij} \), \( Q_{ij} \) and \( R_{ij} \) are the position parameters of screw
corresponding to the jth joint in the ith chain, \( P_{ij} \), \( Q_{ij} \) and \( R_{ij} \) are the position parameters of screw
 .
.
According Eq. (5), we know that it is 6-system kinematic screw for the first limb, so there is no any reciprocal screw. In system \( O - xyz \), the kinematic screw system of the second limb is as

From formula (6), the order of kinematic screw system is 2, so there are 4 reciprocal screws for the second chain, and have

If the actuated joint of the first limb is locked, the kinematic screw system
 composed of the rest joints is
composed of the rest joints is

Based on the reciprocal product principle, it can be found that the reciprocal screw of
 is obtained as
is obtained as

where, \( {\boldsymbol{S}} \) is the direction vector of screw
 , \( {\boldsymbol{S}}_{0} \) is the dual part of \( {\boldsymbol{S}} \), \( P_{a1} \) and \( Q_{a1} \) are non-zero parameters related to the position of
, \( {\boldsymbol{S}}_{0} \) is the dual part of \( {\boldsymbol{S}} \), \( P_{a1} \) and \( Q_{a1} \) are non-zero parameters related to the position of
 . In terms of the definition of the actuation screw, we know that
. In terms of the definition of the actuation screw, we know that
 is the driving force applied to the moving platform by the actuated joint R11, and its direction is parallel to the z-axis.
is the driving force applied to the moving platform by the actuated joint R11, and its direction is parallel to the z-axis.
For the mechanism, the forward orientation solution is to find the posture angles (\( \alpha \) and \( \beta \)) of the platform if the input angular displacements (\( q_{11} \) and \( q_{21} \)) of the actuated joints are known. As shown in Fig. 3, point A is the intersection of two rotational axes in joint U12, point B is the intersection of the moving direction of pair P13 and the vertical axis of the joint U12, point C is the intersection of pair P13 and the vertical axis of the joint U14, point D is the intersection of two axes in U14. Without losing generality, vector OD can be used to describe the posture angle of the platform.

Closed vector polygon diagram
In Fig. 3, the vectors OD, \( {\boldsymbol{OO}}_{ 1} \), \( {\boldsymbol{O}}_{ 1} {\boldsymbol{A}} \), AB, BC and CD form a closed vector polygon. Then, have
Using the original part S of the screw
 to multiply both sides of the Eq. (10), yields
to multiply both sides of the Eq. (10), yields
Rearranging Eq. (11), we have
where, \( O_{1z} \) denotes the coordinate value point \( O_{1} \) along z-axis in system \( O - xyz \), and a and b denote the component of vector AB and CD along z axis, respectively.
Since parameters \( O_{1z} \), \( a \) and \( b \) are only related to the structure size of the mechanism, \( O_{1z} + a + b = 0 \) can be meet through the reasonable design. Therefore, Eq. (12) can be simplified as follows
Thus, the posture angle \( \alpha \) of the platform is
From Fig. 3, we know that the posture angle \( \beta \) of the platform is only related to the angular displacement \( q_{21} \) of the actuated joint R21 in second limb. Then, we have
where, \( c_{0} \) is the initial angle of the platform around the z-axis.
Since both systems \( O - xyz \) and \( P - uvw \) are defined as coinciding to each other at the initial position, we get \( c_{0} = 0 \). Thus formula (15) can be rewritten as follows
3.2 Angular Velocity Analysis
Differentiating Eqs. (13) and (16) with respect to time and rearranging them, the angular velocity equation is obtained
where, \( {\boldsymbol{\omega }} = \left[ {\begin{array}{*{20}c} {{\boldsymbol{\omega }}_{v} } & {{\boldsymbol{\omega }}_{z} } \\ \end{array} } \right]^{\text{T}} = \left[ {\begin{array}{*{20}c} {\dot{\alpha }} & {\dot{\beta }} \\ \end{array} } \right]^{\text{T}} \) is the output velocity vector of the platform, \( {\boldsymbol{\dot{q}}} = \left[ {\begin{array}{*{20}c} {\dot{q}_{11} } & {\dot{q}_{21} } \\ \end{array} } \right]^{\text{T}} \) is the input velocity vector of the actuated joints, J is the velocity Jacobian matrix, and have
Formula (18) shows that the Jacobian matrix J is diagonal, there is a one-to-one control mapping relationship between the inputs and the outputs, so the mechanism has uncoupled kinematics characteristics. Especially the second element on the diagonal line of the matrix is equal to 1, so the condition \( \omega_{z} = \dot{q}_{21} \) is satisfied.
4 Singularity Analysis
Singularity is the inherent property of parallel mechanism. When the structure size of the mechanism is given, the singular configurations will be determined accordingly. Fang and Tsai [12] classified the singular types of parallel mechanisms into three types: limb singularity, actuation singularity and platform singularity.
4.1 Limb Singularity
The occurrence of this kind of singularity is related to the order of limb kinematic screw system, so it is called limb singularity. When the order of the kinematic screw system changes, the order of the constraint screw system also changes, which will lead to instantaneously gain or lose one or more degrees of freedom for the mechanism.
Formula (6) shows that the kinematic system of the second limb is always two-system, so the limb will not have any singular form. Formula (5) shows that the kinematic screw system of the first limb is six-system, and the union of the kinematic screw systems is equivalent to a square matrix \( {\boldsymbol{A}} \). Therefore, singularity of the mechanism is determined that matrix \( {\boldsymbol{A}} \) is full rank or not.
If matrix \( {\boldsymbol{A}} \) is not ranked, the kinematic screw system will be linearly dependent. In a result, the determinant \( \det ({\boldsymbol{A}}) \) is equal to zero. We know that the elementary transformation of a matrix does not affect the rank of the matrix, that is to say, it does not affect whether the determinant is zero or not. According to the method of matrix block calculation, the determinant value of matrix \( {\boldsymbol{A}} \) can be calculated as
Where \( {\boldsymbol{E}} = \left[ {\begin{array}{*{20}c} 1 & 0 & 0 \\ 1 & 0 & { - l\cos q_{11} } \\ { - \sin \beta } & {\cos \beta } & {R_{16} } \\ \end{array} } \right] \), \( {\boldsymbol{F}} = \left[ {\begin{array}{*{20}c} {L_{14} } & {M_{14} } & 0 \\ {P_{15} } & {Q_{15} } & 1 \\ {l\cos q_{11} } & 0 & 0 \\ \end{array} } \right] \).
If anyone of the matrices E or F is under-rank, then the matrix A will be under-rank. Singularity of the mechanism can be analyzed as follows.
Type 1.
Matrix E is under-rank
Based on matrix E, we get \( \det ({\boldsymbol{E}}) = l\cos q_{11} \cos \beta \). If \( \det ({\boldsymbol{E}}) = 0 \), then \( \beta = \pm \pi /2 \) or \( q_{11} = \pm \pi /2 \). When \( \beta = \pm \pi /2 \), screws
 ,
,
 and
and
 are parallel to each other and also parallel to screw
are parallel to each other and also parallel to screw
 of the second limb, see Fig. 4.
of the second limb, see Fig. 4.

Singular configuration at \( \beta = \pi /2 \)
When the actuated joint of the first limb is locked, the rotation element of the orientation feature set of the first limb is \( M_{{{\text{b}}1}}^{r} = [r^{2} //(R_{15} ,R_{16} ) ] \), which means that the platform still has the mobility rotating around the \( v \) axis. The singularity can be avoided by setting the distance between the two universal joints in the first limb.
When \( q_{11} = \pm \pi /2 \), the kinematic screw system can be computed by substituting it into formula (5). Then, the constraint screw of the limb is obtained, and have

Formula (21) represents a zero-pitch screw parallel to z axis, which constrains the movement of the first limb along z-axis. It also implies that the platform loses the ability to translate along the same direction. At last, the rotational mobility around joint R22 of the platform is disappear. Due to the structural constraint, the singular configuration at \( q_{11} = - \pi /2 \) does not occur in the assembly condition shown in Fig. 2, and the singular configuration at \( q_{11} = \pi /2 \) is shown in Fig. 5.

Singular configuration at \( q_{11} = \pi /2 \)
Type 2.
Matrix F is under-rank
Based on matrix F, we have
If \( \det ({\boldsymbol{F}}) = \) 0, then we get \( q_{11} = \pm \pi /2 \) or \( M_{14} = 0 \). When \( q_{11} = \pm \pi /2 \), the same results will be obtained like type 1. When \( M_{14} = 0 \), kinematic screw
 of pair P13 can be rewritten as
of pair P13 can be rewritten as
 = \( [\begin{array}{*{20}c} 0 & 0 & {0;} & 1 & 0 & 0 \\ \end{array} ]^{{\begin{array}{*{20}c} {\text{T}} \\ \end{array} }} \), which is an infinite pitch screw parallel to x axis. At this configuration, screws
= \( [\begin{array}{*{20}c} 0 & 0 & {0;} & 1 & 0 & 0 \\ \end{array} ]^{{\begin{array}{*{20}c} {\text{T}} \\ \end{array} }} \), which is an infinite pitch screw parallel to x axis. At this configuration, screws
 ,
,
 and
and
 are coplanar and linearly dependent so that the limb kinematic singularity occurs, shown in Fig. 6.
are coplanar and linearly dependent so that the limb kinematic singularity occurs, shown in Fig. 6.

Singular configuration when \( M_{14} = 0 \)
4.2 Actuation Singularity Analysis
When the actuated joints of two limbs are locked at the same time, the constraint screws
 and
and
 of two limbs can be obtained in terms of the principle of reciprocal production, and have
of two limbs can be obtained in terms of the principle of reciprocal production, and have


Rearranging
 and
and
 into a matrix G, yields
into a matrix G, yields

After dividing into four sub-blocks, we know if and only if the second sub-block matrix on the main diagonal is not full of rank, the matrix G is under-rank. At this condition, we have \( \beta = q_{11} = \pm \pi /2 \). There are total 4 sets of singular configurations, i.e.,
-
(a) \( \beta = \pi /2, \) \( q_{11} = \pi /2 \); (b) \( \beta = - \pi /2, \) \( q_{11} = \pi /2 \)
-
(c) \( \beta = \pi /2, \) \( q_{11} = - \pi /2 \); (d) \( \beta = - \pi /2, \) \( q_{11} = - \pi /2 \).
Due to the structural constraints of the mechanism, the configurations (c) and (d) do not occur under the assembly condition shown in Fig. 2.
Based on the definition of the actuation screw,
 represented by the Eq. (24) is the driving force spiral applied to the platform by joint R11 through the first limb. If the R11 is locked, the constraint screw
represented by the Eq. (24) is the driving force spiral applied to the platform by joint R11 through the first limb. If the R11 is locked, the constraint screw
 is linearly dependent to the constraint screw
is linearly dependent to the constraint screw
 . So the platform loses the DOF rotating around v-axis. When \( \beta = - \pi /2, \) and \( q_{11} = \pi /2 \), singular configuration is shown in Fig. 7.
. So the platform loses the DOF rotating around v-axis. When \( \beta = - \pi /2, \) and \( q_{11} = \pi /2 \), singular configuration is shown in Fig. 7.

Singular configuration when \( \beta = - \pi /2, \) and \( q_{11} = \pi /2 \)
4.3 Platform Singularity Analysis
When the constraint screws of the mechanism are linear dependence, the platform will lose some ability to constraint its motions. In a result, one or more unexpected degrees of freedom will produce. From formula (7), we know that the constraint screw system applied by the limbs to the platform contains three linear independent zero-pitch screws and one infinite-pitch screw. When the assembly form of the mechanism is given as Fig. 2, there will be no platform singularity.
5 Conclusions
-
(1)
A novel uncoupled two-rotational parallel mechanism is designed in this paper. The kinematic output characteristics of the mechanism are analyzed. Mathematical models of the kinematic problems are established.
-
(2)
Singularity of the mechanism is discussed, including limb singularity, actuation singularity and platform singularity. The singular configurations are also given. The research provides a theoretical basis for the practical application of the mechanism.
References
Zhang, Y.B., Zhao, Y.F., Jing, X.L., et al.: Type synthesis of uncoupled translational parallel manipulators based on actuation wrench screw theory. Adv. Mech. Eng. 10(1), 1–10 (2018)
Di Gregorio, R.: Kinematics of a new spherical parallel manipulator with three equal legs: the 3-URC wrist[J]. J. Field Robot. 18(5), 213–219 (2010)
Hou, Y.L., Duan, Y.B., Yao, J.T., et al.: Configuration optimization and static analysis of adjusting parallel mechanism for the sub-reflector of antenna. Adv. Mater. Res. 338, 425–430 (2011)
Wang, C., Fang, Y., Fang, H.: Novel 2R3T and 2R2T parallel mechanisms with high rotational capability. Robotica 35(02), 401–418 (2017)
Kumar, N., Piccin, O., Bayle, B., et al.: A task-based type synthesis of novel 2T2R parallel mechanisms. Mech. Mach. Theory 77(7), 59–72 (2014)
Xu, Y.D., Chen, L.L., Yan, W.N., et al.: Motion decoupling analysis of a kind of 2R parallel mechanism with two continuous rotational axes. Mech. Mach. Sci. 36, 307–313 (2016)
Hou, Y.L., Zeng, D.X., Duan, Y.B., et al.: The nonexistence of three degrees of freedom rotational fully decoupled parallel mechanism. Appl. Mech. Mater. 284–287, 1951–1955 (2013)
Kuo, C.H., Dai, J.S.: Kinematics of a fully-decoupled remote center-of-motion parallel manipulator for minimally invasive surgery. J. Med. Devices 6(2), 211–214 (2012)
Xu, Y.D., Wang, B., Wang, Z.F., et al.: Investigations on the principle of fully decoupling and type synthesis of the 2R1T and 2R parallel mechanisms. Trans. Can. Soc. Mech. Eng. 43(2), 263–271 (2018)
Jin, X.D., Fang, Y.F., Qu, H.B., et al.: A class of novel 2T2R and 3T2R parallel mechanisms with large decoupled output rotational angles. Mech. Mach. Theory 114, 156–169 (2017)
Zhang, Y., He, X., Wu, X., et al.: Kinematic analysis of a novel spatial uncoupled parallel manipulator. In: Proceedings of IEEE International Conference on Electronic and Mechanical Engineering and Information Technology, Harbin, China, pp. 3345–3348 (2011)
Fang, Y.F., Tsai, L.W.: Structure synthesis of a class of 4-DoF and 5-DoF parallel manipulators with identical limb structures. Int. J. Robot. Res. 21(9), 799–810 (2002)
Acknowledgments
The authors would like to thank the financial support from the Program for Science and Technology of Henan Province (192102210221), Fundamental Project of Key Scientific Research of Henan Advanced Education (18A460001), and Program for Postgraduate Innovative Foundation of Henan University of Science and Technology (CXJJ-2018-KJ03).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wang, K., Zhang, Y., Jing, X. (2020). Kinematics and Singularity Analysis of a Novel Uncoupled 2-DOF Rotational Parallel Mechanism. In: Wang, D., Petuya, V., Chen, Y., Yu, S. (eds) Recent Advances in Mechanisms, Transmissions and Applications. MeTrApp 2019. Mechanisms and Machine Science, vol 79. Springer, Singapore. https://doi.org/10.1007/978-981-15-0142-5_26
Download citation
DOI: https://doi.org/10.1007/978-981-15-0142-5_26
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-0141-8
Online ISBN: 978-981-15-0142-5
eBook Packages: EngineeringEngineering (R0)