
Abstract
Dual Active Bridge (DAB) bi-directional DC-DC converters can transmit power in both directions, realize zero voltage switching (ZVS), and have high power density, which can be well applied to power electronic transformers. Three common control methods for DAB converters are described in detail in this paper. They are phase-shift control, single PWM, and dual PWM control. Aiming at the shortcomings of large loop current and limited range of zero-voltage switching when the converter has low-load operation, a multi-mode control is proposed, which broadens the range of zero-voltage switching, reduces the effective value and peak value of the current, and makes converter efficiency improve. Finally, MATLAB software was used to simulate the feasibility of the program.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The dual active bridge (DAB) is particularly suitable for high-power isolated DC-DC converters. Its advantages are high power density, zero voltage switching (ZVS), bidirectional transmission power, symmetrical structure, and control simple. Dual-active bridge converters are widely used in electric vehicles, aerospace technologies, and renewable energy power generation.
However, in wide voltage range applications, the DAB converter has a limited range of zero voltage switching and a high loop current at low loads. In order to solve this problem. Demetriades G D reduces the loop current by improving the traditional phase-shifting control method, so that the transmission efficiency is slightly improved [1]. Krismer et al. considered the importance of application in low-voltage, high-current applications. Zero-current switching (ZCS) was used for both H-bridges of the converter [2]. The literature [3, 4] proposes to use the pulse width modulation strategy (PWM) to expand the zero-voltage switching range of the DAB converter, but only use the PWM on the front or rear axle. A further study was made in [5]. PWM control was used for both H-bridges, but the effect of PWM on current rms and peak values was not considered. Literature [6] proposed an optimized single PWM strategy to reduce losses. The literature [7, 8] uses different small-signal models to define the DAB’s dynamic performance, because the analysis process is especially complex considering the influence of parasitic parameters.
In order to solve the problem of low transmission efficiency and high reactive power loss when the DAB is under low load, this paper proposes a multi-mode control method for DAB converters, which makes full use of the advantages of phase shift control, dual phase shifting and triple phase shifting at low loads. When using a triple phase shift, the load changes to a double phase shift, and after the load increases further, it switches to traditional phase shift control. Zero-voltage switching can also be achieved at no-load under multi-mode control methods, and the loop current is reduced. At the same time, the core loss of the transformer is reduced, so that the low-load efficiency is improved. Verified by MATLAB modeling simulation.
2 DAB Converter
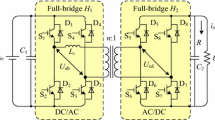
Figures 1(a) and (b) are the schematic and working waveforms of the DAB converter, respectively. The converter consists of two H-bridges (HB1 and HB2) and a transformer with leakage inductance L. Since the value of the pair inductance is higher, an inductor can be connected in series externally. HB1 and HB2 work with a duty cycle of 50% and the phase difference between them is a controlled phase angle ϕ.

DAB converter
From Fig. 1 we can find the expression of the transmission power:
Among them, switching frequency is fs, L is the leakage inductance, the voltage ratio is set K = NV2/V1, N is the ratio of turns of the original secondary side of the transformer, and the reference value of the defined power is \( P_{base} = V_{ 1}^{ 2} /X_{L} , \) where the standard value of the transmission power is XL = 2πfsL, then the standard value of transmission power is:
The formula (2) shows that the size and direction of the transmission power are determined to ϕ. When ϕ > 0, HB1 ahead of HB2, Power from V1 to transmission V2. At that time ϕ < 0, power is reversed. This method of changing the size and direction of power transmission by changing ϕ, it is called phase shift control. Due to the presence of leakage inductance, the output current of each bridge leg lags behind the output voltage, and the switched capacitor charges and discharges during the dead time, thereby achieving zero voltage switching.
3 DAB Converter PWM Control
3.1 Single PWM Control
Based on the phase shift control, the duty cycle of the front axle or the rear axle is controlled again. Such a control method is generally called a single PWM plus phase shift control method. The operating characteristics of DAB bidirectional DC-DC converters in forward and reverse power transmission are similar. When the voltage ratio k ≤ 1, adjust the primary voltage duty cycle D1; when k > 1, adjust the secondary voltage duty cycle D2, while the two switch tubes on each bridge are 180° complementary conduction, in both cases, the working principle is similar. Therefore, the following uses the converter’s forward transmission power as an example to analyze the operating characteristics of the single-PWM plus phase-shift control and define the duty cycle Dφ corresponding to the phase-shift angle ϕ between HB1 and HB2. The control variables at this time are: D1 and Dφ. Different transmission time and different trigger times can be used to derive the corresponding transmission power expressions, where \( \alpha_{1} = (1 - D_{1} )\pi \).
Similarly, the power expression of the reverse transmission of the converter can be expressed.
Equation (3) shows that the positive and negative angle ϕ determine the direction of the transmission power, and the magnitude of the angle ϕ and α1 the sum of the transmission power. When ϕ = π/2, α1 = 0, the maximum transmission power is the same as the phase shift control.
When ϕ ∊ [−π/2, π/2], the power is in a monotonously increasing relationship ϕ and the same power is being transmitted, the current RMS and peak values in this range are relatively small. The following begins to analyze the range of zero voltage switching of the converter.
When using HB1 with PWM control, advanced bridge arm Q1 and Q2 zero voltage switching requires ιa > 0, Lag bridges Q3 and Q4 requires ιb > 0, ιc > 0. These can be obtained by setting the corresponding vertex current. This gives the optimal value α1 = π(1 − k) of the control variable at the maximum range of the zero voltage switch.
In addition to the widening of the zero-voltage switching range, the angle ϕ can also be used to minimize the effective value of the transformer current, thereby reducing the transmission loss of the winding and the switch. Here, in order to achieve a simpler implementation, directly use α1 = π(1 − k) without considering the load.
3.2 Dual PWM Control
On the basis of phase shift control, the duty cycle of two H-bridges is controlled at the same time. This control method is generally called dual-PWM plus phase-shift control. It is necessary to adjust the primary-side voltage duty ratio D1, the secondary-side voltage duty ratio D2, and the phase shift angle ϕ between HB1 and HB2 at the same time. So there are three control variables D1, D2 and ϕ. In the same way as in the previous section, taking the converter’s forward transmission power as an example, the operating characteristics of dual-PWM plus phase-shift control are analyzed. In order to achieve soft switching, the literature [13] proposed that the duty cycle of the primary voltage should be less than the duty cycle of the secondary side, ie D1 < D2.
Dual PWM plus phase shift control has three control variables D1, D2 and ϕ, depending on the trigger time of the three variables, it can derive the corresponding transmission power expression, in α1 = π(1 − D1), α1 = π(1 − D2).
Similarly, the power expression of the reverse transmission of the converter can be introduced. The positive and negative angle ϕ determines the direction of the transmission power. The size of the angle ϕ, α1 and α2 determines the magnitude of the transmission power. When α1 and α2 are fixed, the larger the angle, the greater the transmission power. When ϕ is fixed, the smaller the angle α1 and α2, the greater the transmission power, when ϕ = π/2, α1 = 0, the maximum transmission power.
(1) Zero voltage switching range and current RMS
Similar to single PWM, when ϕ ∊ [−π/2, π/2], the current rms and peak current are relatively small. Modes C and D are not within this range, so consider the zero voltage switching range below to analyze modes A, B, C, and F only.
With dual PWM control, the HB1 leading-edge arm and zero-voltage switching requires ιa > 0, lagging arm and requires ιb > 0, HB2 leading-edge arm and requires ιc > 0, lagging arm and requires ιd > 0. You can set the range of control variables for all switches to achieve soft switching by setting the corresponding peak current. In mode A, there is no guarantee that all switches can achieve zero-voltage switching, so it is not desirable. In mode B, the conditions for all switches to achieve soft switching are:
Obviously, this inequality can only be satisfied ϕ > 0. With a simple choice, let this α1 − kα2 = (1 − k)π be similar to the case of ϕ > 0 a single PWM, but the current rms is greater than the rms current of a single PWM, and mode C has no advantage at this time.
From Eq. (4), it can be seen that in mode C, only the angle is changed and no change in power occurs. Therefore, this model is not desirable.
In mode F, all switches can achieve zero voltage switching at low loads.
In contrast, Mode F has clear advantages. Combining zero voltage switching conditions, by setting the vertex current selection:
This option theoretically guarantees zero-voltage switching while minimizing the rms current.
(2) Multi-mode solution
Dual PWM operation is only feasible for low-load operation and does not have any advantage when the load is increased. Therefore, a multi-mode solution is proposed. When the load is continuously increased, the operation of the transformer is switched from dual PWM in mode E to ϕ > 0 single PWM in time and then to phase shift control. In order to restore the full power capability of the converter, three operating states can be smoothly switched by setting the value. When α1 = π(1 − k), also say ϕ = π(1 − k)/2, It is at the critical point of single PWM and dual PWM conversion. When ϕ = π/2 is reduced to zero, it is naturally switched to PWM-free phase-shift control. The simplest solution is to have a linear change between the two points. The entire multi-mode scheme is given by the following equation:
4 Simulation Verification and Results
This article uses MATLAB software to simulate the circuit. The main parameters of the DAB bidirectional DC-DC converter are as follows: rated power P0 = 3 kW; switching frequency fs = 5 kHz; input voltage V1 = 360 V; output voltage V2 = 216 V; original secondary side turns ratio N=1.
Like HB2, HB1 uses an IGBT module for each switch, and an RC snubber circuit with a capacitor and resistor connected in series. In the simulation process, the inductor currents in both PWM-less and PWM-based cases are first compared at low load.
At the same power level, it can be seen that the double-PWM at the low load is further reduced compared to the phase shift control and the single H-bridge PWM current peak, and the transformer core loss is reduced, and the double PWM efficiency is improved. Figure 2 shows the current rms and converter efficiency in phase-shifted, single PWM, and dual PWM modes. Figure 2 shows that at low load (100 W) the efficiency increases from 21% without PWM to 50% with single H-bridge PWM and then to 78% with dual PWM. As the rms current and peak value decrease, the efficiency of the converter rises significantly. However, as the load increases, the efficiency of a single PWM gradually exceeds that of a dual PWM, so it is more advantageous. As the load increases further, the RMS current of the single PWM starts to increase sharply. At this time, the phase shift control with a low rms current should be selected.

Current RMS and Efficiency in Different Modes
5 Conclusion
In this paper, the PWM control DAB converter is deeply analyzed and the advantages of dual PWM, single PWM and PWM-free phase-shift control are integrated. A multi-mode scheme is proposed. Dual PWM is suitable for operation at low loads, and the advantages of the inverter in processing a wide range of input and output voltages are especially obvious. When the load is increased, the dual PWM has little effect, so a single PWM is used. After the load is further increased, compared with the conventional phase shift control, the single PWM maximum power transmission capability is not high, and the current RMS is higher, so the phase shift control is directly adopted. The multi-mode solution addresses these limitations: 1 using dual PWM at low load; 2 switching to single PWM when the load is increased; 3 further increasing the load, increasing the duty cycle of the PWM output bridge, and dual PWM at the maximum basic phase shift And single PWM naturally switches to phase shift control without PWM. The simulation results show that under low load conditions, the converter has high efficiency under double PWM control. After the load increases, the dual PWM loses its advantage. At this time, the single PWM with higher efficiency is used. After the load is further increased, the efficiency of the single PWM and phase shift control approaches However, the latter’s current RMS is relatively low, so phase-shift control is used, thus demonstrating the feasibility of a multi-mode solution.
References
Demetriades, G.D.: On small-signal analysis and control of the single-and the dual-active bridge topologies. KTH (2005)
Krismer, F., Round, S., Kolar, J.W.: Performance optimization of a high current dual active bridge with a wide operating voltage range. In: 37th IEEE Power Electronics Specialists Conference. PESC 2006, pp. 1–7. IEEE (2006)
Vangen, K., Melaa, T., Bergsmark, S., et al.: Efficient high-frequency soft-switched power converter with signal processor control. In: 13th International Telecommunications Energy Conference. INTELEC 1991, pp. 631–639. IEEE (1991)
Tao, H., Kotsopoulos, A., Duarte, J.L., et al.: Transformer-coupled multiport ZVS bidirectional DC–DC converter with wide input range. IEEE Trans. Power Electron. 23(2), 771–781 (2008)
Oggier, G.G., Garcia, G.O., Oliva, A.R.: Switching control strategy to minimize dual active bridge converter losses. IEEE Trans. Power Electron. 24(7), 1826–1838 (2009)
Costinett, D., Zane, R., Maksimović, D.: Discrete-time small-signal modeling of a 1 MHz efficiency-optimized dual active bridge converter with varying load. In: 2012 IEEE 13th Workshop on Control and Modeling for Power Electronics (COMPEL), pp. 1–7. IEEE (2012)
Qin, H., Kimball, J.W.: Closed-loop control of DC–DC dual-active-bridge converters driving single-phase inverters. IEEE Trans. Power Electron. 29(2), 1006–1017 (2014)
Krismer, F., Kolar, J.W.: Accurate power loss model derivation of a high-current dual active bridge converter for an automotive application. IEEE Trans. Industr. Electron. 57(3), 881–891 (2010)
Alonso, A.R., Sebastian, J., Lamar, D.G., et al.: An overall study of a Dual Active Bridge for bidirectional DC/DC conversion. In: 2010 IEEE Energy Conversion Congress and Exposition (ECCE), pp. 1129–1135. IEEE (2010)
Xu, H.: Topology and analysis theory of high power bidirectional DC-DC Converter. Graduate School of Chinese Academy of Sciences (Electrical Institute) (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zhang, Y., Du, Y. (2019). Multi-mode Control Strategy for Dual Active Bridge Bidirectional DC-DC Converters. In: Xie, Y., Zhang, A., Liu, H., Feng, L. (eds) Geo-informatics in Sustainable Ecosystem and Society. GSES 2018. Communications in Computer and Information Science, vol 980. Springer, Singapore. https://doi.org/10.1007/978-981-13-7025-0_7
Download citation
DOI: https://doi.org/10.1007/978-981-13-7025-0_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-7024-3
Online ISBN: 978-981-13-7025-0
eBook Packages: Computer ScienceComputer Science (R0)