
Abstract
Reliability Analysis has played an important role in Engineering Design. Reliability Analysis is essentially based on principles of probability and statistics. To that extent, Mathematical principles are heavily used in Reliability and Risk Analysis. One can definitely say that mathematics plays an important role in the solution of many physical problems in various disciplines. In any discipline, the first step to solve any the physical problem is to formulate an equivalent mathematical model making some realistic assumption. The second step is then to solve the mathematical model using available tools. If drastic and unrealistic assumptions are made then the model becomes very simple to solve but it being too far from the actual physical model, will not result in any meaningful results. On the other hand, if enough assumptions are not made to arrive at the corresponding mathematical model, the model thus arrived may be too complex to solve. So, the challenge for the Scientists and Engineers is to deduce a good realistic mathematical model for a Physical problem and then solve it using available mathematical tools. This basic principle is common to any branch of science or engineering or nonengineering discipline as well as such as Political Science, Sociology, Kinesiology or Medicine just to name a few. This keynote speech will discuss the basic principles of how to conduct interdisciplinary research using mathematics as a common base. It is then followed by applications to various disciplines such as calculation of poverty index in the area Sociology, mathematical analysis of subdural hematoma in the area of medical field, Risk Analysis of lumbar spine in the area of Kinesiology and calculation of Risk Priority Numbers (RPN) for failures of bridges in the area of civil engineering.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction: How to Conduct Interdisciplinary Research?
Basic steps to conduct interdisciplinary research are the following:
-
a.
Identify the system under study
-
b.
Formulate a corresponding mathematical model based on practical assumptions
-
c.
Identify mathematical tools to solve the mathematical model
-
d.
Solve the mathematical model
-
e.
Get results
-
f.
Relate it to the Physical System under study
One has to be careful in developing the mathematical model. If we make too many assumptions the mathematical model will have almost no connection with the Physical model and the results will be irrelevant. On the other hand, if we make too few assumptions the mathematical model developed may be very difficult to solve. The important thing to note is that while the physical systems may be different, once a corresponding mathematical model is created, the tools used to solve the mathematical model are same whether it is an Engineering problem, Sociology, Political Science, Economics or Medical Science, Kinesiology, Agriculture or any field for that matter. The results of using the above basic principles to the following disciplines are presented in this keynote speech.
-
Sociology
-
Civil Engineering
-
Kinesiology.
2 Case-1 Sociology: Mathematical Formulation of Poverty Index
The definition of “poor” is not uniform. It changes from country to country. For a reasonable comparison, an indicator such as the human poverty index or simply poverty index can be used. The poverty index can be considered as an indicator of the standard of living in a country. It changes from country to country. Quantification of the poverty index is a complex issue. This is because it is a function of so many parameters. United Nations has generated a document to define HPI (Human Poverty Index). It is expressed in terms of three factors P1, P2, and P3 as follows:
where
- P 1 :
-
probability at the birth of not surviving to age 40
- P 2 :
-
adult illiteracy rate
- P 3 :
-
unweighted average of population without sustainable access to an improved water source and children underweight for age
- α:
-
3
This formulation, in the opinion of this author, does not represent realistically the poverty index. It misses important factors such as the economy of the household and the family size while it includes unimportant factors such as illiteracy rate and sustainable access to improved water source and children underweight.
It can be argued that since literacy is directly connected to the economic level of a household and hence illiteracy is connected to poverty. On the other hand, it is difficult to justify the connection of human poverty index to sustainable access to an improved water source. Similarly, there are some other definitions of poverty index given in the literature [1, 2]. For example, Gini coefficient has been suggested by Bhattacharya et al. [1] connecting the mean income and population size. It is given as follows:
where
- G(y):
-
Gini coefficient
- z :
-
mean income
- n :
-
population size
But, none of these models existing in the literature catch the essence of poverty index for families of different sizes. Some of the work reported literature in this respect connects the poverty level to the prices of the commodities like sugar and rice. It is to be noted that these are indirect parameters that affect the poverty level. Further, the equation suggested by the United Nations is a nonlinear equation not very easy to use.
Hence, there is a need for a new formulation of poverty index.
2.1 Description of New Model
where
- PI:
-
poverty index
- e :
-
economic level (family income)
- f :
-
family size
- k :
-
constant of proportionality
The above relation is based on the inherent realistic assumption that PI is inversely proportional to economy level (e) or family income and directly proportional to the family size (f).
Derivation of the formula for the new model is given below:
From the above, one can write the following equalities:
Combining the above two equations,
where
In here, k1 and k2 are the constant of proportionalities connected with family income (e) and family size (f). k is the combined constant of proportionality. It is to be noted that Eq. 8 is the same equation as Eq. 3. The constant of proportionalities can be evaluated based on the actual data. The data for family size and median family income can be either in terms of median or mean value. It can be said that this is a simple but realistic approach to calculate the poverty index. It is to be noted that Eq. 2 for calculation of the poverty index is simple to use even though nonlinear in nature.
2.2 Validation of the New Model
The above model (shown in Eq. 2) can be validated using the actual data existing in the literature.
2.3 Analysis of Data
Using the values tabulated in Table 1, the poverty index can be calculated from the following equation, derived from Eq. 6. This is given as
HHS [3] gives poverty guidelines. These are given in Table 2 below.
The e values are obtained from Table 1 for each of the states in the USA. That includes 48 contiguous States and D.C. and the states of Alaska and Hawaii. The k1 values can be obtained from Table 2 for the corresponding state. There exists no specific data for the median family size like the median family income tabulated in Table 1. The indirectly derived median family size as per the existing data existing in literature is found to be 4.5. This implies that 50% population has family size more than 4.5 and 50% less. As this number seems to be high, a median family size is taken as 2 (k2f = 2) for calculation of the poverty index. kf represents the modified value of actual f using the constant of proportionality.
2.4 Application of Optimization Principles to Poverty Index
To get an optimal value of the poverty index, one can apply the principles of NLPP (Nonlinear Programming problem) to Eq. 8 which is a nonlinear equation. A Non-linear Programming problem (NLPP) can be solved by successive linearization of the Linear Programming problem (LPP). There are several techniques available for solving LPP problems for standard and nonstandard LPP [4, 5].
Alternatively, one can use the principles of Lagrange Multiplier to get an initial optimal value of Poverty index. Then, the value of the poverty index can be refined by standard techniques of NLPP.
For this the optimization problem can be formulated as follows:
The numbers 2 and 8 have been picked based on HSS [3].
The corresponding Lagrange function L can be written as
The solution of the above optimization problem can be found by the solution of simultaneous equations obtained by taking partial derivatives of Eq. 14 with respect to p, e, λ1, and λ2. This will give optimal values of poverty index as well as the optimal values of the family income (e) and the family size for the minimum poverty index.
2.5 Results
The poverty indices are tabulated in Table 3 below for various states.
2.6 Conclusions
Poverty indices have been calculated for various states, in general, using the new model.
It has been found that the poorest state is Puerto Rico, followed by West Virginia based on the poverty indices.
The model suggested is a robust and general model and can be used to determine the poverty indices in other countries in the world without any loss of generality even though it has been used to study the poverty level in various states in the USA in this study.
3 Case-II Civil Engineering: Probabilistic Analysis of Cycle Length for Signalized Intersections in Transportation Engineering
The design of a traffic intersection is of utmost importance in transportation engineering. This is because this intersection space is shared by several traffic streams. These could be North/South, East/West, through traffic (TH), Right Turn (RT), Left Turn (LT), or any combination depending on the actual traffic at that intersection. The actual design of a traffic intersection describes the set of parameters. These, in turn, will define the operation of a signalized intersection. This means that once a signal intersection is designed it will set the timings of each of the lights (green, yellow, and red) for various phases of traffic at that intersection which could be through traffic, left/right turn or any combination going in N/S and/or East/West. The actual cycle lengths (for each of the lights—Green, Yellow, or Red) for any phase is determined by the well known Webster Formula [6] given below:
where
- C 0 :
-
optimal cycle length in s
- L :
-
total lost time during a cycle, which consists of the startup delay minus the portion of yellow utilized by drivers
- CS:
-
sum of the flow ratios of critical movements
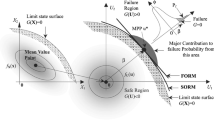
The above equation is basically a deterministic equation. As is well known, in a deterministic analysis, all the variables in the mathematical model (corresponding to a actual Physical model) are supposed to have a fixed value. On the other hand, in a probabilistic analysis, there is uncertainty associated with each of the variables and hence each variable is considered a Random Variable (RV). This RV is supposed to have certain distributions which is determined based on density function and validated by chi-square test. In this study, the Cycle length is calculated using the probabilistic approach. Then the corresponding safety indices (β values) are calculated based on First-Order Second Moment (FOSM) approach discussed in the literature [7]. In this study, only CS is treated a Random variable while L is treated as a deterministic variable.
3.1 Methodology
Based on the available values of saturation flows (s) in the literature [6], calculate the statistical parameters of μs, and σs using the following equations:
Using the method of partial derivatives, the and are given as
The corresponding safety index is defined as [7]:
3.2 Results and Discussion of Results
The mean value and standard deviation of the saturation flow, are calculated (from the basic Eqs. 16 and 17) as:
The values of μco and σco are obtained as 26.53 and 22.34, respectively.
The corresponding safety index β is obtained as 1.19. This implies a failure probability of 0.1111. This indicates a high probability of failure. That implies that the traffic parameters have to be adjusted to increase the safety index thereby decreasing the probability of failures. It can be seen from the results that for the problem and the data considered a high value of safety index β is obtained.
3.3 Conclusions
The First-Order Second Moment (FOSM) Reliability method has been successfully applied to the cycle length problem which makes the results more realistic.
4 Case-III Kinesiology: Calculation of Forces in a Lumbar Spine Model with Multiple Support Stays
The work on this research project originated in 2005. The estimation of forces in the basic lumbar spine model [8] as shown in Fig. 1 is considered for this purpose.

Basic lumbar spine with connected guy wires. (actual model [8])
An equivalent model is considered as shown in Fig. 2.

Lumbar spine with connected guy wires. (equivalent model)
This model is used for estimation of forces. The method used for finding out forces in the lumbar spine and guy wires is Direct Stiffness method [9].
The basic equation used is given below:
where
- {AD}:
-
action vector corresponding to unknown displacements in the original structure
- {ADL}:
-
action vector corresponding to unknown displacements caused by the loads
- [S]:
-
stiffness matrix
- {D}:
-
unknown displacement vector
In this analysis, {ADL} vector is a null vector as there are no loads acting on the members. The Kinematic indeterminacy (KI) of the structure is 1 which is the unknown displacement {D}, which is the displacement at the top node of vertebrae L. Since the displacements at the top nodes of other vertebrae are proportional to this displacement, the only unknown in this analysis is {D}.
The expressions for the stiffness matrix (which is 1 element in this case) is given as,
where E and A represent the modulus of elasticity and cross-sectional area of each of the guy wire (all guy wires are assumed to have the same area and modulus of elasticity). From this, the displacement is calculated as
The corresponding expression for the displacement for the model with 5 stacked guy wires is given as
This is 20% of the corresponding value for a single set of guy wires model [10] as can be seen from Eqs. 22 and 23. The forces in the lumbar spine and the guy wires can be calculated using the following basic equation:
where
- {AM}:
-
member forces
- {AML}:
-
member forces caused by the loads
- {AMD}:
-
member forces caused by the displacements
- {D}:
-
displacement vector of the structure
In this analysis, since no external loads are considered to act on the members, {AML} is a null vector. The general expression for AMD for any member i is given as
where Li represents the length of the member under consideration. Similarly, γi indicates the angle that the member i makes with the horizontal axis.
Using Eqs. 24 and 25, the member forces in the lumbar spine and the guy wires are calculated. These are as shown below.
This implies that the force in the lumbar spine is 58.5% of the applied load.
4.1 Refined Lumbar Spine Model
The refined lumbar spine model with multiple support stays is discussed in this section. This model is shown in Fig. 3.

Refined lumbar spine model with multiple support stays
The following assumptions are made in this analysis.
-
1.
It is assumed that the lumbar spine is divided into 5 equal segments.
-
2.
There are 5 stacked guy wires each emanating from one of the lumbar vertebrae.
-
3.
The displacement in each of the vertebrae is proportional to the distance of each segment from the pelvis.
-
4.
The model is treated like a truss in which the rotations at the joints are neglected.
-
5.
The total number of unknowns in this refined model is 2 which is the horizontal and vertical displacement of the top node.
The equivalent refined model using multiple support stays is shown in Fig. 4.

Equivalent refined lumbar spine model with multiple support stays
The analysis of this refined lumbar spline model (treating it like a truss) follows along the same lines as that of a pair of stays. The expression for the stiffness element is given below as
The corresponding displacement D is given as,
Based on the assumptions made as stated above
See Fig. 4 for the clarification of the displacements D1 through D5. After going through various mathematical calculations and derivations, the final expression for the member force in the lumbar spine can easily be derived. The corresponding expression is given as
Simplifying above expression, the force in the lumbar spine works out to be 0.363P. This implies that there is a reduction of 60.0% of the force in the lumbar spine if guy wires were not used. It is to be noted that the corresponding value obtained by using a single set of guy wires is 0. 585P as reported elsewhere [10]. This implies that the force in the lumbar spine is reduced even further by using a stacked guy wires than a single set of guy wires.
4.2 Conclusion
In this keynote speech, applications of the mathematical model are shown for the fields of Sociology, Medical Field, Civil Engineering and Kinesiology. Similarly, the principles of engineering and mathematics can be applied to other fields. All one has to do is think a little bit which I am sure we can all do. Thinking sure hurts but gives good results in the end.
References
Bhattacharya, N., Coondoo, D., & Mukherjee, R. (1991). Poverty, inequality and prices in rural India. London: Sage Publications.
Krishnaswamy, K. S. (1990). Poverty and income distribution. Bombay: OxfordUniversity Press.
The 2007 HHS Poverty Guide Lines. United States Department of Health & Human Resources.
Hillier, F. S., & Liebermann, G. J. (2004). Introduction to operations research (7th ed.). New York: Mc Graw Hill.
Putcha, C. S. (2007). Development of a new optimization method to problems in Engineering Design. To be published in International Journal of Modelling and Simulation.
Papacostas, C. S., & Prevedouros, P. D. (2001). Transportation Engineering and Planning. Prentice Hall.
Ellingwood, B., Galambos, T. V., MacGregor, J. G., AllinCornell, C. (1980) Development of a robability-based load criterion for american national standard A58. NBS Special Publication 577, National Bureau of Standards, Washington, DC.
McGill, (2002). Low back disorders: evidence-based prevention and rehabilitation. Champaign, IL: Human Kinetics.
Weaver, W. Jr., & Gere, J. M. (1990). Matrix analysis of structures. Van Noostrand Reinhold.
Hodgdon, J. A., & Putcha, C. S. (2006). Estimation of forces in lumbar spine and associated guy wires. J Biomech
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Putcha, C. (2019). Application of Reliability and Other Associated Mathematical Principles to Engineering and Other Disciplines. In: Varde, P., Prakash, R., Joshi, N. (eds) Risk Based Technologies. Springer, Singapore. https://doi.org/10.1007/978-981-13-5796-1_16
Download citation
DOI: https://doi.org/10.1007/978-981-13-5796-1_16
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-5795-4
Online ISBN: 978-981-13-5796-1
eBook Packages: EngineeringEngineering (R0)