
Abstract
An anti-icing application of AC-SDBD plasma actuator has been explored through experiments. The purpose of this study is to study both the thermal and aerodynamic effects on plasma anti-icing. Two types of multi-SDBD actuators were designed with different induced flow directions. One type (Type-1) is designed to generate an induced flow with direction same to the incoming flow, while the other (Type-2) is used to generate an induced flow with an opposite direction to the incoming flow. The anti-icing tests were carried out in an icing-wind-tunnel. The ice accretion and corresponding surface temperature have been recorded using a high-speed digital camera and infrared imaging system respectively. The results show that the Type-1 actuator can ensure that the leading edge of the airfoil remained smooth and did not have the ice accretion, while the Type-2 actuator had ice accumulation on the leading edge, but it can effectively postpone the ice location on the upper surface of the airfoil. Such results show that the anti-icing effects are directly related to both the thermal and aerodynamic effects of the DBD plasma actuator.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Icing accumulation on aircraft or wind turbine can lead to disaster, so how to prevent the icing accumulation? It has been a concern for these issues in the aerospace community over decades [1,2,3,4,5]. The icing on the surface of aircraft will change the flow characteristics, which will lead to lift reduction and increase in drag. The icing on control part will reduce the reliability for flight control. In wind energy, the icing on the blades of wind turbine changes their aerodynamic shape, which will lead to tower overload, reduction in power generation efficiency and increase losses.
In order to reduce the impact of icing for flight operation and wind turbines, two widely used methods are anti-icing and de-icing. Anti-icing refers to prevention of icing in specific areas, and de-icing refers to removal of ice. The methods can divide into three categories [1] which are: the liquid-based; the mechanical-based; and the thermal-based [6, 7].
With breakthroughs of the significant technology in the area of aerodynamics, materials and powers, there are many challenges on the current anti/de-icing methods. For example, the application of natural laminar flow technique requires the extremely smooth and precisely finished surfaces, while the current mechanical-based and hot-air anti/de-icing designs feature surface gaps and steps configurations which can provoke laminar-turbulent transition [8]. Another example, the bleed hot air system is the method mostly used by jet aircrafts to keep flight surfaces above the freezing temperature required for ice to accumulate. But it will not be a proper way for the next generation aviation when the great advancement towards the all-electric and composite materials aircraft technologies. As there is no hot air system for an all-electric aircraft and the hot air is not used to protect composite structures because of the materials temperature limitations [9,10,11]. Therefore, the novel methods and techniques for more efficient anti/de-icing performance are considered desirable [1, 12, 13].
Plasma flow control has developed very rapidly as an active flow control technology in past decade. Plasma flow control technique provides improvement in aerodynamic performance such as: the enhancement of lift, drag reduction by effectively controlling the separation. Surface dielectric barrier discharge (SDBD) plasma actuators can be driven using an alternating current (AC) power source. The AC-SDBD plasma actuator consist of two electrodes, arranged in an asymmetric way on the dielectric material. Applying a sufficiently high AC voltage between the electrodes ionize the air on the buried electrode. The electrons in the air obtain energy due to the presence of the electric field, and the energy is transmitted to other surrounding particles of air by collision. This phenomenon generates a body force to realize an active flow control [14,15,16,17].
The main disadvantage of plasma flow control is its low efficiency of energy conversion (the surface discharge-induced kinetic efficiency versus discharge current is only several percents) [14]. For AC-SDBD plasma actuator, it can not only cause an aerodynamic effect on surrounding air by producing jets but also has a thermal effect on the system by producing heat under high voltage, which makes the temperature of electrodes, substrates and surrounding air rise. Actually, more energy is dissipated due to heat production. The thermal behavior of AC-SDBD has been observed in previous studies [18,19,20,21,22,23]. The emission spectroscopy, infrared camera, and thermocouple techniques were used. The results show that the electrons obtain energy from the external electric field and transfer this energy to other particles through collision; most of the energy is eventually released as heat. The temperature has the same magnitude with the rotational temperatures of the electrons and presents a nearly linear increase for a few seconds.
Roth et al. [20] proposed that the real power delivered to the plasma actuator is divided between dielectric heating and power delivered to the plasma. Dong et al. [21] found that most of the active power dissipation during the operation of actuator used to generate the plasma. After that, the power dissipated through the dielectric before the plasma ignition, the result indicates that main mechanism of dielectric heating is the heat transfer through the plasma - through direct injection, convection, and radiation. Tirumala et al. [22] studied the standard plate-to-plate DBD and the wire-to-plate DBD actuators. According to the results, it is deduced that the temperature distribution of main part of dielectric surface is determined by the convection of gas above the surface. The direct thermal injection at the plasma position plays a minor role in it. Rodrigue et al. [23] experimentally showed that when plasma actuators are operating at very High voltage, higher temperatures found in the plasma-forming region, but lower temperatures were found at the exposed electrodes, which means that main thermal energy dissipation occurs in the plasma-forming region. Jukes et al. [24] observed that the vortex generated at the beginning of the actuator operation can carry heat for transmission.
Meng et al. [25, 26] and Cai et al. [27] conducted a feasibility study of AC-SDBD plasma actuator on a cylinder model for anti-icing in an icing-wind-tunnel. They showed when the AC-SDBD plasma actuator is used as an anti-icing device, no ice formation is observed. When it is used as a de-icing, after activating the plasma actuator for a certain period of time, a certain thickness of the ice layer is effectively removed. Zhou et al. [28] and Tian et al. [29] conducted the study over an airfoil model using SDBD plasma generation for icing mitigation. They concluded that the actuators can be used as a promising anti-icing tool for aircraft icing mitigation by taking advantage of the thermal effects associated with plasma generation. As such, the details of the flow with the super cooled water droplets response and thus the mechanism of the DBD plasma icing control remain unclear.
In the present paper, two sets of DBD plasma actuators with different induced flow directions are designed. The main purpose is to study both the thermal and aerodynamic effects on the anti-icing using the DBD plasma actuation. In the experiment, a digital camera is used to record the dynamic processes of plasma anti-icing, while the infrared imaging system is used to map the surface temperature changes in the anti-icing process. The anti-icing results between the two sets of plasma actuators are compared to reveal the plasma icing control mechanism.
2 Experimental Setup
2.1 Icing-Wind-Tunnel
The plasma anti-icing experiments are conducted in a closed low-speed icing wind tunnel, and the influence of ice on aircraft is studied by simulating the super-cooled droplets icing environment. The lateral wall of the test section of the icing-wind-tunnel is transparent and visible, the size of the test section is 400 mm (wide) × 400 mm (high) × 2000 mm (long), the maximum speed of the wind tunnel is 100 m/s, and the lowest air temperature is −25 °C. The size of the super-cooled water droplets in the wind tunnel is about 10–100 µm. The liquid water content can be adjusted from 0.05 to 10 g/m3.
This experiment uses a high-speed camera to photograph the surface of the airfoil, and synchronously uses the infrared thermal imager to measure the temperature distribution of the surface temperature distribution of the NACA 0012 airfoil and the influence of the voltage and frequency on the temperature.
In this study, the freestream velocity is kept constant at U∞ = 40 m/s, and the air temperature is constant at −5 °C. The LWC level of the incoming airflow is 1.0 g/m3. During the experiments, the icing-wind-tunnel will continue to work for about 20 min under the above conditions, so as to ensure the thermal equilibrium state in the test section. First, the two types of the actuators will work for a period of time before turning on the water spray system. At this time, the surface temperature of the actuators is quickly accumulated and close to stability. Then the water spray system of the wind tunnel is opened, at this time the super-cooled water droplets carried by the airflow would impact the surface of the airfoil model and start the ice accretion process. Because of the limitations of the experimental setup, there is less ice on the lower surface of an airfoil, therefore, the icing control on the leading edge and the upper surface of the airfoil is just studied in this paper.
2.2 Model and Plasma Actuators
The model used in the experiment is the NACA 0012 airfoil. The chord of the airfoil is 0.15 m, and the span is 0.4 m, which is the same as the cross-sectional width of the icing-wind-tunnel. The corresponding Re number based on the airfoil chord is approximately 3.6 × 105. The experimental model is made of a hard plastic material and manufactured using 3D printing technology, building the model layer-by-layer with a resolution of about 25 µm. The surface of the model is coated with a primer and polished with 1000 grit sandpaper. In all test scenarios, the airfoil’s angle of attack (AoA) is fixed at 5°.
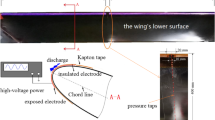
The multi-SDBD actuator, which consists of a few single SDBD plasma actuators, are mounted on the upper surface of the airfoil. One single SDBD plasma actuator consists of two 0.07-mm-thick copper foil electrodes arranged in an asymmetrical fashion. The exposed and covered electrodes are separated by Kapton tape as the dielectric barrier, which consists of 3 layers of 0.13-mm-thick Kapton tape. There is no gap or overlap between exposed and covered electrodes to generate uniform plasma. The design scheme of the single actuator has been optimized so that the actuator can have higher induced flow velocity, larger influence range, and lower power consumption.
Two sets of multi-SDBD plasma actuators are mounted on the airfoil upper surface as shown in Fig. 1(b), and the SDBD plasma actuators are arranged on the surface of the airfoil. In an anti-icing experiment, in order to evaluate the effectiveness of the DBD plasma actuators under the identical icing conditions, when one type of the actuators is turned on, another actuator remains closed.

Schematic illustrations of (a) Single SDBD plasma actuator and (b) Plasma actuators mounted on the upper surface of the airfoil.
Experiments are performed two times because of the two different sets of SDBD actuators. Figure 2 shows the schematics of two types of actuator layouts tested in two time periods. For the actuators, the effective length in spanwise is 96 mm and that in chordwise is 48 mm. The two types of actuators consist of 4 exposed electrodes (5 mm wide, chordwise) and 4 buried electrodes (5 mm wide). The Type-1 actuator is designed to generate an induced flow same with the incoming flow, while the Type-2 actuator is used to generate an induced flow in opposite to the incoming flow. The Fig. 1(b) shown above is the situation that the Type-2 actuator is working while another actuator is closed, the purple glows indicate the direction of the induced flow is opposite to that of the incoming flow.

Schematic illustrations of two arrangement types of actuators.
2.3 Flow Diagnostics
The high-voltage AC power supply for the actuator can provide the peak-to-peak amplitude varying from 0 to 30 kV and center frequency from 1 to 100 kHz. The voltage applied to the actuator is measured by a Tektronix P6015A high-voltage probe. The current through the actuator is measured by the Pearson Electronics Model Pearson 2877 high-response AC current probe. The signals from these devices are processed in real time by a Tektronix DPO3054 oscilloscope.
A high-speed imaging system, Model Dimax of PCO-Tech Inc, with the maximum spatial resolution of 2000 pixels × 2000 pixels, along with a 60 mm optical lens (Nikon, 60 mm Nikkor 2.8D) is used to record the ice accretion process over the pressure side of the airfoil. The high-speed imaging system is mounted above the airfoil model with a measurement window size of 190 mm × 190 mm (i.e., with a spatial resolution of 10.5 pixels/mm) to record the ice accretion process on both the plasma-on and plasma-off sides of the airfoil surfaces simultaneously (Fig. 3).

Schematic illustration of sample lines and points.
An infrared (IR) thermal imaging system, Model FILL-A615, is used to map the corresponding temperature distribution of the airfoil surface during the ice accretion process. In order to obtain an infrared thermal image, an infrared emission transmission window is embedded on the top plate of the test section. The focus area of the infrared thermal imaging system is the front part of the airfoil (i.e., the region near the leading edge of the airfoil), and the measurement window size is 115 mm × 95 mm. The infrared thermal image has a spatial resolution of 5.1 pixels/mm.
In order to compare the different icing accretion process between plasma-on and plasma-off, there are two sample lines, Sl1 and Sl2, respectively located on the plasma-on and plasma-off regions to study the temperature distributions.
3 Results and Discussions
The most ideal effect of anti-icing is to keep most of the surface of the wing free of ice, especially in critical pneumatic positions such as the leading edge. In this study, it is found that different plasma actuator layouts have different effects on anti-icing process.
Two types of the plasma actuators are performed in two periods for U∞ = 40 m/s, T∞ = −5 °C, LWC = 1.0 g/m3, the power supply voltage of the two types of actuators keeps unchanged, but different anti-icing effects are exhibited. After both of the actuators working for 100 s, the nearly thermal equilibrium on model surface is achieved, then the results of t = 112 s are presented. Figures 4 and 5 show the instantaneous photos extracted from the high-speed camera results and the corresponding surface temperature distributions recorded simultaneously using the IR camera. The super-cooled water droplets carried by the flow impinge on the surface of the airfoil and are then heated by the plasma actuator. Since the heat transfer process of the plasma actuator is not sufficient to ensure that the water striking the airfoil remains liquid at all times, a multi-fingered stream structure of typical nodular ice is found behind the actuator.

Ice accretion photo and corresponding surface temperature distribution over airfoil of Type-1 actuator for t = 112 s, U∞ = 40 m/s, T∞ = −5 °C, LWC = 1.0 g/m3.

Ice accretion photo and corresponding surface temperature distribution over airfoil of Type-2 actuator for t = 112 s, U∞ = 40 m/s, T∞ = −5 °C, LWC = 1.0 g/m3.
Figures 4(a) and 5(a) have shown the slightly different structure of ice accumulation on plasma-off sides, they are the typically nodular ice, while the structures of ice accumulation on the plasma-on side are significantly different. For the Type-1 arrangement performed in the first period, Fig. 4(a) clearly shows that the leading edge of the airfoil remained smooth and no ice accumulation occurs in the region of plasma actuator on the plasma-on side, while as shown in Fig. 5(a), the ice accretion present in the regions of the leading edge, and the area where the ice appeared close to the trailing edge is postponed to 80% of chord for Type-2 arrangement.
Figures 4(b) and 5(b) show the airfoil surface temperature distribution corresponding to the actuators, confirming the slightly different structure of ice accumulation on plasma-off sides is due to the different heat transfer when the actuators work. While on plasma-on sides of the actuators, the temperature distribution for Type-1 in the region from leading edge to last single SBD actuator is significantly higher, but then, the temperature drops relatively faster, and the temperature is lower near the trailing edge than that of the Type-2 arrangement.
See Fig. 6, from the temperature distribution on sample lines, we can see that the curve of Type-1 has a significantly higher temperature at the leading edge, it shows that the Type-1 actuator can keep heat close to the airfoil surface, that is because the jets produced by the Type-1 actuator are in the same direction as the incoming flow, and the jets isolate the vicinity of the dielectric layer from the freestream, thereby forming a thermal insulation layer. Meanwhile, the temperature near the trailing edge for Type-2 arrangement is relatively higher because the counter-jets interact with the incoming airflow to create a mixture flow in the actuator region, bringing the heat generated by the actuator more efficiently into the air and downstream.

Temperature distributions on sample lines of two arrangement types of actuators for t = 112 s.
This paper compares the power consumption of the two arrangement types of actuators in one cycle before and after the impact of the super-cooling water droplets. The sinusoidal actuation voltage and frequency for Type-1 and Type-2 actuators are kept at 14 kV and 10 kHz. Equation 1 is used to calculate the power density per unit area q, where R, n, and A refer to the actuation period, cycle number, and reference area respectively.
Figures 7(a) and 8(a) show the variation curves of voltage and current in one AC cycle under the experimental conditions of U∞ = 40 m/s, T∞ = −5 °C, and LWC = 1.0 g/m3. Figures 7(b) and 8(b) show the power consumption and coupled power waveform changes of the SDBD plasma actuators. The graphs show a large spike in the voltage and instantaneous current curves due to the presence of micro-discharges in the discharge region. The power evolution waveform shows that powers for Type-1 and Type-2 actuators are 51 W and 57 W respectively before the impact of super-cooled water droplets, and 47 W and 38 W after that. The power of the two actuators before and after the impact of the super-cooled water droplets is decreased. At the same time, under the constant power input of the AC power supply, after the surface of the electrode is covered with moisture, the voltages will reduce a little for the two arrangement types of actuators, and the power consumption of Type-1 and Type-2 actuator decrease.

Electrical parameters of AC-SDBD plasma actuator during anti-icing tests for Type-1 actuator for U∞ = 40 m/s, T∞ = −5 °C, LWC = 1.0 g/m3. (a) Voltage and current. (b) Power consumption.

Electrical parameters of AC-SDBD plasma actuator during anti-icing tests for Type-2 actuator for U∞ = 40 m/s, T∞ = −5 °C, LWC = 1.0 g/m3. (a) Voltage and current. (b) Power consumption.
The following table shows the power consumption and the corresponding power density of the two arrangements after the super-cooled water droplets are struck. Two reference areas Ap, Aa are used to calculate the power density. The former uses the surface area of multi-SDBD plasma actuator as a reference area, and at this time, the plasma actuator is considered as a thermal-based anti-icing method. The latter will use surface area without ice accretion on the plasma-on side, in which case the actuator is considered as an anti-icing method of both thermal and aerodynamic effects (Table 1).
4 Conclusions
Two types of multi-SDBD plasma actuators are designed and installed on the NACA 0012 airfoil model. The tests are conducted in an icing-wind-tunnel with a fixed wind speed of 40 m/s and constant air temperature of −5 °C. The results show that the jets produced by plasma discharge can affect the final anti-icing effect. Aerodynamic effects produced by the actuator interact with the thermal effect, thus changing the heat distribution, and then having different effects on ice formation. For the Type-1 arrangement, the produced jets are in the same direction as the incoming flow, and the jets isolate the vicinity of the dielectric layer from the freestream, thereby forming a thermal insulation layer, making the leading edge of the airfoil remained smooth and no ice accumulation occurs in the region of plasma actuator. While for Type-2 arrangement, the temperature near the trailing edge is relatively higher because the counter-jets interact with the incoming airflow to create mixture flow in the actuator region, bringing the heat generated by the actuator into the air and downstream. Power consumption analysis shows that the energy consumption of plasma actuation between two types of actuators is almost same.
Abbreviations
- AoA :
-
= Angle of attack, deg
- A p :
-
= Surface area of multi-SDBD plasma actuator, m2
- A a :
-
= Surface area without ice accretion on the plasma-on side, m2
- c :
-
= Chord length, m
- F :
-
= Frequency of AC waveform, kHz
- I :
-
= Current, A
- LWC :
-
= Liquid water content, g/m3
- P :
-
= Power consumption, W
- P t :
-
= Power evolution, W
- P I :
-
= Instantaneous power, kW
- q :
-
= Power density, kW/m2
- Re :
-
= Chord Reynolds number without water pray
- SDBD :
-
= Surface Dielectric Barrier Discharge
- t :
-
= Time, s
- T ∞ :
-
= Air static temperature, °C
- T :
-
= Surface temperature, °C
- U ∞ :
-
= Freestream velocity, m/s
- V p- p :
-
= Peak-to-peak voltage amplitude of the source, kV
References
Thomas SK, Cassoni RP, MacArthur CD (1996) Aircraft anti-icing and de-icing techniques and modeling. J Aircr 33(5):841–854
Petty KR, Floyd CDJ (2004) A statistical review of aviation airframe icing accidents in the US. National Transportation Safety Board
Cebeci T, Kafyeke F (2003) Aircraft icing. Ann Rev Fluid Mech 35(1):11–21
Parent O, Ilinca A (2011) Anti-icing and de-icing techniques for wind turbines: critical review. Cold Reg Sci Technol 65(1):88–96
Cao Y, Tan W, Wu Z (2018) Aircraft icing: an ongoing threat to aviation safety. Aerosp Sci Technol 75:353–385
Pourbagian M, Talgorn B, Habashi W, Kokkolaras M, Digabel SL (2014) On power optimization of aircraft electro-thermal anti-icing systems. G-2014-72
Dong W, Zhu J, Zheng M, Chen Y (2015) Thermal analysis and testing of nonrotating cone with hot-air anti-icing system. J Propul Power 31(3):896–903
Abbas A, de Vicenteb J, Valerob E (2013) Aerodynamic technologies to improve aircraft performance. Aerosp Sci Technol 28:100–132
Lampton A, Valasek J (2012) Prediction of icing effects on the lateral/directional stability and control of light airplanes. Aerosp Sci Technol 23:305–311
Shinkafi A, Lawson C (2014) Enhanced method of conceptual sizing of aircraft electro-thermal de-icing system. Int J Aerosp Mech Eng 8:1073–1080
Charles P, Harris E (2011) Opportunities for next generation aircraft: enabled by revolutionary materials. In: AIAA SDM conference
Nagappan N, Golubev VV, Habashi W (2013) Parametric analysis of icing control using synthetic jet actuators. In: AIAA 2013, p 2453
Liu Y, Bond LJ, Hu H (2017) Ultrasonic-attenuation-based technique for ice characterization pertinent to aircraft icing phenomena. AIAA J 55:1602–1609
Moreau E (2007) Air flow control by non-thermal plasma actuators. J Phys D Appl Phys 40:605–636
Little J, Samimy M (2010) High-lift airfoil separation with dielectric barrier discharge plasma actuation. AIAA J 48:2884–2898
Mertz BE, Corke TC (2011) Single-dielectric barrier discharge plasma actuator modelling and validation. J Fluid Mech 669:557–583
Wang J, Choi KS, Feng L, Jukes T, Whalley RD (2013) Recent developments in DBD plasma flow control. Prog Aerosp Sci 62:52–78
Aleksandrov NL, Kindysheva SV, Nudnova MM, Starikovskiy AY (2010) Mechanism of ultra-fast heating in a non-equilibrium weakly ionized air discharge plasma in high electric fields. J Phys D Appl Phys 43:1–19
Jayaraman B, Thakur S, Wei S (2007) Modeling of fluid dynamics and heat transfer induced by dielectric barrier plasma actuator. J Heat Transf 129(4):517–525
Roth JR, Dai X, Rahel J, Shermann DM (2005) The physics and phenomenology of paraelectric one atmosphere uniform glow discharge plasma (OAUGDP) actuators for aerodynamic flow control. In: AIAA 2005, pp 1–11
Dong B, Bauchire JM, Pouvesle JM, Magnier P, Hong D (2008) Experimental study of a DBD surface discharge for the active flow control of subsonic airflow. J Phys D Appl Phys 41:1–9
Tirumala R, Benard N, Moreau E, Fenot M, Lalizel G, Dorignac E (2014) Temperature characterization of dielectric barrier discharge actuators: influence of electrical and geometric parameters. J Phys D Appl Phys 47:1–12
Rodrigues F, Páscoa J, Trancossi M (2018) Experimental analysis of DBD plasma actuators thermal characteristics under external flow influence. J Heat Transf 140(10):102801:1–102801:10
Jukes TN, Choi KS, Segawa T, Yoshida H (2007) Jet flow induced by a surface plasma actuator. Proc Inst Mech Eng Part I 222(I5):347–356
Meng X, Chen Z, Song K (2014) AC- and NS-DBD plasma flow control research. In: Proceedings of the 2nd NPU-DLR workshop on aerodynamics. DLR, Institut fur Aerodynamik und Stromungstechnik, DLR-IB 124-2014/5 1-75
Meng X, Cai J, Tian Y, Han X, Zhang D, Hu H (2016) Experimental study of deicing and anti-icing on a cylinder by DBD plasma actuation. In: AIAA 2016, p 4019
Cai J, Tian Y, Meng X, Han X, Zhang D, Hu H (2017) An experimental study of icing control using DBD plasma actuator. Exp Fluids 58(102):1–8
Zhou W, Liu Y, Hu H, Hu H, Meng X (2018) Utilization of thermal effect induced by plasma generation for aircraft icing mitigation. AIAA J 56(3):1–8
Tian Y, Zhang Z, Cai J (2018) Experimental study of an anti-icing method over an airfoil based on pulsed dielectric barrier discharge plasma. Chin J Aeronaut 31(7):1449–1460
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Grant Nos. 11672245), the National Key Laboratory Research Foundation of China (Grant No. 9140C420301110C42), the Fundamental Research Funds for the Central Universities (3102018JCC008), and the 111 Project (B17037). The authors are grateful to Dr. Yang Liu and Wenwu Zhou, Iowa State University for their helps on this research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Li, C., Hu, H., Meng, X., Cai, J., Hu, H. (2019). Aerodynamic and Thermal Effects of Plasma Actuators on Anti-icing over an Airfoil. In: Zhang, X. (eds) The Proceedings of the 2018 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2018). APISAT 2018. Lecture Notes in Electrical Engineering, vol 459. Springer, Singapore. https://doi.org/10.1007/978-981-13-3305-7_81
Download citation
DOI: https://doi.org/10.1007/978-981-13-3305-7_81
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-3304-0
Online ISBN: 978-981-13-3305-7
eBook Packages: EngineeringEngineering (R0)