
Abstract
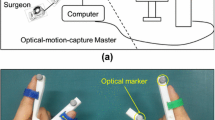
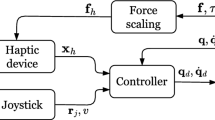
Tactile feedback sensation is an important factor in the surgical and medical application. A simple gripper is developed to perform precision grasping using teleoperation technology. The system provides the user with the tactile feedback sensation through a haptic device that applies forces on the user’s fingertip based on the measured force at the gripper’s fingertip.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Sokhanvar, S., Dargahi, J., Najarian, S., Arbatani, S.: Tactile Sensing and Displays: Haptic Feedback for Minimally Invasive Surgery and Robotics. Wiley, Hoboken (2013)
Kaban, G.K., Czerniach, D.R., Litwin, D.E.M.: Controversies in laparoscopic surgery: hand-assisted laparoscopic surgery, pp: 101–109. Springer (2006)
Meijer, D.W., Bannenberg, J.J.G., Jakimowicz, J.J.: Hand-assisted laparoscopic surgery: an overview. In: Surgical Endoscopy, pp: 891–895 (2000)
Yoshida, K., et al.: Development of five-finger robotic hand using master-slave control for hand-assisted laparoscopic surgery. In: Proceeding of the 38th Annual International Conference of the Engineering in Medicine and Biology Society (EMBC) (2016)
Takayama, T., Omata, T., Futami, T., Akamatsu, H., Ohya, T., Kojima, K., Takase, K., Tanaka, N.: Detachable-fingered hands for manipulation of large internal organs in laparoscopic surgery. In: Proceedings of 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, pp. 244–299 (2007)
Spiers, A., Baillie, S., Pipe, T., Persad, R.: Experimentally driven design of a palpating gripper with minimally invasive surgery considerations. In: Proceeding of IEEE Haptics Symposium, pp. 261–266 (2012)
Robohub website. https://robohub.org/naist-openhand-m2s-released/. Accessed 16 Feb 2017
Acknowledgment
This research project is fund by JSPS through the research grant number 15K21436. The hardware design & fabrication and the experiments tests were conducted by a group of students from Takanishi laboratory at Waseda University. The students’ names are Kentaro Kato, Masahiro Okawara, Yasutaka Takebe, Takanobu Matsubara, Koki Yamaguchi, Takashi Ohashi, Syunya Ogawa, Takehiro Sato, Hideki Mizubami, and Syunya Yoshida.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Omer, A., Hamdi, J., Takanishi, A. (2019). Development of a Teleoperation Precision Grasping System with a Haptic Feedback Sensation on the User’s Fingertip. In: Kajimoto, H., Lee, D., Kim, SY., Konyo, M., Kyung, KU. (eds) Haptic Interaction. AsiaHaptics 2018. Lecture Notes in Electrical Engineering, vol 535. Springer, Singapore. https://doi.org/10.1007/978-981-13-3194-7_16
Download citation
DOI: https://doi.org/10.1007/978-981-13-3194-7_16
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-3193-0
Online ISBN: 978-981-13-3194-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)