
Abstract
Every industry needs speed and torque ripple control of induction motor in large number of applications. The number of induction motor takes more time during starting, settling and transient period. As more time is taken by the motor so there are more losses, more heat, less efficiency and more ripples are produced. To overcome these drawback, direct torque control technique known as conventional technique, is used with induction motors, but with up to certain limits the drawbacks are reduced. In this paper a new technique an Adaptive Neuro-Fuzzy Interference System (ANFIS) with DTC is proposed to overcome the drawbacks of conventional DTC technique. Now by implementing and comparing the proposed technique ANFIS with conventional one it is seen that the system becomes less complicated, the performance of the speed and torque control of the induction motor is also improved. It is also seen that as we compared the proposed technique with conventional one the rise time is reduced by 256 ms settling time is reduced by 687 ms and transient time is reduced by 202 ms and torque ripples are also reduced and the overall performance of the induction motor is improved.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The electrical power generated in the world about 60% of it is consumed by three phase Induction motors [1]. Induction motors are extensively utilized in industries, as it is easy in construction, minimum operating cost, require less repair cost, more efficient and economical as compared to the other machines of the same rating [2]. Three phase induction motor has highly efficient at low loads. The induction motor has a drawback of wide speed control. The speed control of an induction machine is becoming easy with power electronics devices [3, 4]. Now a day vector control, scalar control and direct torque control (DTC) techniques are utilized to control the torque of an ac motors. Unlike vector control, In direct torque control, there is no need for coordination transformation, no encoder, and no current regulator [5, 6]. A DTC limit the torque and flux of induction motor directly depends upon instantaneous errors. DTC technique is one of the main control technique presented by German Scientist Blaschke and Depenbrock in 1971 and 1985. Later on, ABB Company replaces the previous conventional techniques with latest AC drive techniques [7,8,9].
The main aim of this paper is to limit the torque and flux of an ac machine with direct torque control and ANFIS technique. The proposed controller not only has a simple structure but also has all of the functions for a high accurate speed control for working with all the speed range. In this paper, a presented method ANFIS is also compared with a conventional method.
The remaining paper is prepared as follows: Sect. 2 presents the Mathematic modelling of a three-phase induction motor, while Sect. 3 describes the principal model of DTC for the induction motor. Section 4; discuss the proposed ANFIS method is discussed in detail in Sect. 5 shows the simulation results and discussion. At last, Sect. 6 gives the conclusions discussion.
2 Mathematical Model of Three-Phase Induction Motor
The three-phase induction motor consists of stationary stator frame and rotating wound rotor, which are the main parts of motor. A stator consists of the stationary part and rotating part is known as the rotor. The parameters of three-phase induction motors are stator resistance, rotor resistance, self-inductance, stator reactance, mutual inductance and rotor reactance of the motor [10,11,12,13]. The equivalent circuit of an ac machine is drawn in Fig. 1 [14,15,16]. A voltage source inverter model is shown in Fig. 2.

The equivalent circuit diagram of three phase AC machine

Voltage source inverter circuit
where
Va, Vb, and Vc are the per phase instantaneous voltages. The Eqs. (1) and (2) shows that Eqs. (1) has 6 non-zero states and Eq. (2) has 2 null states. The phasor diagram of Eqs. (1) and (2) shown in Fig. 3 and the voltage vector/switching table is shown in Table 1. Normally Vd and Vq are the torque and flux parameters of voltage vector, where Vd controls the flux of the system and Vq controls the torque of the motor. A voltage source inverter is utilized to limit the supply voltage easily. The voltage space phasor using Eq. (1) along D-axis is Vt [17,18,19,20]. The voltage vector/switching table is shown in Table 1.

DTC with space vector
3 Principle Model of Direct Torque Control
The torque and speed is controlled directly using different voltage vector in DTC. The voltage vector selection is based on the error among the calculated torque and flux and their respective base values. These values should be remaining within the limits of hysteresis comparators. The stator flux and stator torque be able to restrict directly as choosing a particular inverter switching states of the DTC [21, 22].
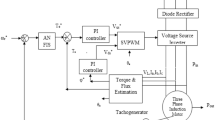
The voltage and current can be calculated by the use of electromagnetic flux and torque of induction motor. The stator flux linkage was obtained by the integrating the stator voltages and the torque are obtained by the multiplication of stator flux linkage vector and measured induction machine current. Now the calculated values are then compared with base values. As per the error values obtained voltage vector selection takes place. The DTC block diagram is drawn in Fig. 4 [23, 24].

Fundamental diagram of DTC
The block diagram consist of Torque and flux controller block, switching table block, voltage source inverter block, induction motor and DC supply voltage. The dc supply is connected to voltage source inverter; here the dc supply is converted into three phase supply by using the parks transformation ratio. This three phase supply is connected to the three phase induction motor. The take off point is taken from the supply and fed back to the torque and flux controller block. This block control the torque and flux and fed to the torque and flux comparator. Here the toque and flux are compared with reference torque and flux and fed to the switching table. The switching table control the input with different switching position, and fed to the voltage source inverter.
Here Vs and Vr are the three-phase stator voltages and, Vd is stator voltage direct axis and Vq is stator voltage of quadrature axis. is and ir are three-phase stator and rotor currents respectively, while isd, isq, stator current of direct axis and quardature axis and ird, irq rotor current of direct axis and quardature axis.
4 Principle of ANFIS
An adaptive Neuro-Fuzzy controller is the mixture of the Fuzzy logic controller and artificial neural network controller. Neural network controller provides combined construction and learning outcomes of a Fuzzy logic system and the fuzzy logic controller provides the neural system with a standard structure with high-level fuzzy rules of thoughts and analysis. The ANFIS is proposed technique using a combination of fuzzy logic and artificial neural network [25,26,27].
Here the electro-magnetic torque of an ac machine is controlled by changing the values of torque. The produced value is forwarded to fuzzy interference system for the generation of fuzzy rules. The ANFIS is created by different stages, first stage is known as training stage and the second stage is known as testing stage [28, 29]. A basic working of the Training phase and Testing phase is discussed as under.
Training Phase:
In this phase training data set is generated for ANFIS. In this control technique, the torque and variable torque is produced in the form of phasor/vectors for induction motor that is connected to neural system. After the preparation of values by back Propagation, then algorithm is prepared to calculate the actual torque control of induction motor. Now, the prepared information is utilized to produce the fuzzy rules. There for the fuzzy based control rules are produced consequently in ANFIS [30].
Testing Phase/Stage:
In this phase tested speed control is created that is used in ANFIS. In this testing stage, the real torque and the difference in the torque of the induction motor are connected to the input, there for the suitable control electro-magnetic torque is produced for the ANFIS.
ANFIS Structure:
The basic ANFIS structure consists of different layers that are known as input layer, membership function input layer, rule layer, and members function output layer and last layer output layer. The basic structure is shown in Fig. 5 and the working of ANFIS network layers is as under [31,32,33,34].

Structure of ANFIS
-
1:
Every node of this layer generates the membership function of the input variable with node function.
-
2:
The outgoing of layer second is a multiplication of the entire inward coming signals.
-
3:
In this layer the calculated weight is normalized.
-
4:
All the nodes of this layer include the linear function.
-
5:
This Layer includes the addition of all output of layer-4.
5 Results and Discussion
The simulation structure of a presented ANFIS controller is drawn in Fig. 6, Supply voltage of ANFIS with DTC is drawn in Fig. 7, Stator current of direct axis and quadrature axis is drawn in Fig. 8, Rotor speed is shown in Fig. 9, Electro-magnetic Torque and stator current is shown in Fig. 10 and Output vector of ANFIS with DTC (Fig. 11).

Simulation diagram of ANFIS with DTC

Supply voltage of ANFIS with DTC

D-axis and Q-axis of stator current of ANFIS

Rotor speed of ANFIS with DTC

Electromagnetic Torque and stator current ANFIS with DTC

Output vector of ANFIS with DTC
The Comparative analysis of presented and conventional technique is shown in Table 2.
From the comparative analysis it is seen that the proposed ANFIS technique improves the performance of induction machine for rise time, settling time, transient times and torque ripples are reduced than the conventional technique.
6 Conclusions and Discussion
In this paper, ANFIS control technique is used for speed and torque control of the induction motor is proposed. The proposed control technique is easy to construct and easy to use in a large number of practical applications. The proposed technique is compared with conventional technique on the basis of rise time, settling time transient response and torque ripples for an induction motor. From the comparative analysis, it is seen that the rise time is reduced by 256 ms, the settling time is reduced by 687 ms, transient time is reduced by 202 ms and torque ripples are also reduced. The proposed technique also control speed and reduce the torque ripples with a good extent of three phase Induction motor. As a point of discussion we can say that, there is an overall improvement in the performance of induction motor when the proposed technique ANFIS is implemented as compared to conventional technique. For further enhancement of the DTC model in induction motor, a \( \mu \)–controller can be design based on artificial intelligence.
References
Sekhar, D.C., Marutheswar, G.V.: Direct torque control of three phase induction motor with ANFIS and CUCKOO search algorithms. Int. J. Pure Appl. Math. 114, 501–514 (2017)
Mishra, R.N., Mohanty, K.B.: Implementation of feedback-linearization-modelled induction motor Drive through an adaptive simplified neuro-fuzzy approach. Sadhana 42, 2113–2135 (2017)
Swain, S.D., Ray, P.K., Mohanty, K.B.: Improvement of power quality using a robust hybrid series active power filter. IEEE Trans. Power Electron. 32, 3490–3498 (2016)
Mishra, R.N., Mohanty, K.B.: Real time implementation of an ANFIS-based induction motor drive via feedback linearization for performance enhancement. Eng. Sci. Technol. Int. J. 19, 1714–1730 (2016)
Li, J.Q., Li, W.L., Deng, G., Ming, Z.: Continuous-behaviour and discrete-time combined control for linear induction motor-based urban rail transit. IEEE Trans. Magn. 52(7), 1–4 (2016)
Alexandridis, A., Chondrodima, E., Sarimveis, H.: Cooperative learning for radial basis function networks using particle swarm optimization. Appl. Soft Comput. 49, 485–497 (2016)
Krishna, V., Mamanduru, R., Subramanian, N., Tiwari, M.K.: Composite particle algorithm for sustainable integrated dynamic ship routing and scheduling optimization. Comput. Ind. Eng. 96, 201–215 (2016)
Venkataramana, N.N., Thankachan, J., Singh, S.P.: A neuro-fuzzy direct torque control using bus-clamped space vector modulation. IET Tech. Rev. 33, 205–217 (2016)
Venkataramana, N.N., Singh, S.P.: A comparative analytical performance of F2DTC and PIDTC of induction motor using the space ds-1104. IEEE Trans. Ind. Electron. 62, 7350–7359 (2015)
Ramesh, T., Panda, K.: Type-2 fuzzy logic control based MRAS speed estimator for speed sensor less direct torque and flux control of an induction motor drive. ISA Trans. 57, 262–275 (2015)
Mishra, R.N., Mohanty, B.K.: Performance enhancement of a linearized induction motor drive using ANFIS based torque controller. In: Proceedings of the 12th India International Conference (INDICON), vol. 5, pp. 1–6 (2015)
Igoulalenei, I., Benyoucef, I., Tiwari, M.K.: Novel fuzzy hybrid multi-criteria group decision making approaches for the strategic supplier selection problem. Expert Syst. Appl. 42, 3342–3356 (2015)
Uddin, M.N., Huang, Z.R.: Development and implementation of a simplified self-tuned neuro-fuzzy-based IM drive. IEEE Trans. Ind. Appl. 50, 51–59 (2014)
Sekhar, D.C., Marutheshwar, G.V.: Modelling and field oriented control of induction motor by using an adaptive neuro fuzzy interference system control technique. Int. J. Ind. Electron. Electr. Eng. 2, 75–81 (2014)
Wang, S.Y., Tseng, C.L., Chiu, C.J.: Design of a novel adaptive TSK-fuzzy speed controller for use in direct torque control induction motor drives. Appl. Soft Comput. 31, 396–404 (2015)
Lia, Y., Weib, H.: Research on controlling strategy of dual bridge matrix converter-direct torque control of induction motor. Energy Proc. 16, 1650–1658 (2012)
Duanx, X., Deng, H., Li, H.: A saturation-based tuning method for fuzzy PID controller. IEEE Trans. Ind. Electron. 60, 577–585 (2013)
Kumar, G.D., Pathak, M.K.: Comparison of adaptive neuro-fuzzy based space vector modulation for two level inverter. Int. J. Electr. Power Energy Syst. 38, 9–19 (2012)
Pimkumwonga, N., Onkronga, A., Sapaklomb, T.: Modelling and simulation of direct torque control induction motor drives via constant volt/hertz technique. Proc. Eng. 31, 1211–1216 (2012)
Mohammed, T.L., Muthanna, J.M., Ahmed, I.S.: Space vector modulation direct torque speed control of induction motor. Proc. Comput. Sci. 5, 505–512 (2011)
Geyer, T.: Computationally efficient model predictive direct torque control. IEEE Trans. Power Electron. 26, 2804–2816 (2011)
Rubaai, A., Jerry, J., Smith, S.T.: Performance evaluation of fuzzy switching position system controller for automation and process industry control. IEEE Trans. Ind. Appl. 47, 2274–2282 (2011)
Tang, Z.R., Bai, B., Xie, D.: Novel direct torque control based on space vector modulation with adaptive stator flux observer for induction motors. IEEE Trans. Magn. 46, 3133–3136 (2010)
Areed, F.G., Haikal, A.Y., Mohammed, R.H.: Anadaptive neuro-fuzzy control of an induction motor. Ain Shams Eng. J. 1, 71–78 (2010)
Uddin, M.N., Chy, M.I.: A novel fuzzy logic controller based torque and flux controls of a synchronous motor. IEEE Trans. Ind. Appl. 46, 1220–1229 (2010)
Geyer, T., Papafotiou, G., Morari, M.: Model predictive direct torque control—part I, part-II: concept, algorithm, and analysis. IEEE Trans. Power Electron. 56(6), 1894–1905 (2009)
Karakas, E., Vardarbasi, S.: Speed control of motor by self-tuning fuzzy PI controller with artificial neural network. Sadhana 32, 587–596 (2007)
Kouro, S., Rodriguez, J.: High-performance torque and flux control for multilevel inverter fed induction motors. IEEE Trans. Power Electron. 22(6), 2116–2123 (2007)
Toufouti, R., Meziane, S., Benalla, H.: Direct torque control for induction motor using intelligent techniques. J. Theor. Appl. Inf. Technol. 3(3), 35–44 (2007)
Changyu, S., Lixia, W., Qian, I.: Optimization of Injection modeling process parameters using combination of artificial neural network and genetic algorithm method. J. Mater. Process. Technol. 183, 412–418 (2007)
Lin, F.J., Huang, P.K., Chou, W.D.: Recurrent-fuzzy neural- network-controlled linear Induction motor servo drives using Genetic algorithms. IEEE Trans. Ind. Electron. 54, 449–1461 (2007)
Grabowski, P.Z., Bose, B.K., Blaabjerg, F.: A simple direct-torque neuro-fuzzy control of PWM-Inverter-fed induction motor drive. IEEE Trans. Ind. Electron. 47, 863–870 (2000)
Bindal, R.K., Kaur, I.: Performance of three phase induction motor of direct torque control using fuzzy logic controller. Int. J. Pure Appl. Math. 118, 159–175 (2018)
Bindal, R.K., Kaur, I.: Comparative analysis of different controlling techniques using direct torque control on induction motor. In: 2016 2nd International Conference on Next Generation Computing Technologies (NGCT), pp. 191–196. IEEE (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
The presented control methods have been tested on a 5.4 HP (4 KW) three phase induction motor.
Voltage = 400 V
Frequency = 50 Hz
Inductance of Stator = 5.839 mH
Speed = 1430 rpm
Resistance of rotor = 1.394 Ω
Stator resistance = 0.8 Ω
Inductance of rotor = 2.6 mH
Mutually inductance Lm = 172.2 mH
Pole = 4
Rotor inertia (J) = 0.0129 kg/m2
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bindal, R.K., Kaur, I. (2019). Speed and Torque Control of Induction Motor Using Adaptive Neuro-Fuzzy Interference System with DTC. In: Luhach, A., Singh, D., Hsiung, PA., Hawari, K., Lingras, P., Singh, P. (eds) Advanced Informatics for Computing Research. ICAICR 2018. Communications in Computer and Information Science, vol 955. Springer, Singapore. https://doi.org/10.1007/978-981-13-3140-4_73
Download citation
DOI: https://doi.org/10.1007/978-981-13-3140-4_73
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-3139-8
Online ISBN: 978-981-13-3140-4
eBook Packages: Computer ScienceComputer Science (R0)