
Abstract
There is no better way to study fundamental phenomena in quantum mechanics than the use of optical setup with matter-waves. In particular, neutrons in an interferometer or a polarimeter have been serving as an almost ideal tool for this sort of studies. Here, several experiments are described, which investigates the uncertainty relations appearing in successive quantum measurements: successive measurements of the neutron’s 1/2-spin is carried out to evaluate the error of a measurement and the disturbance induced by that measurements. The results of the first experiment confirm the violation of Heisenberg’s original reciprocal relation for measurement error and disturbance and the validity of the reformulated generally valid relation. Before this experiment, there have been no experimental study of the uncertainty relation inherent in the quantum measurement. Further experimental studies are carried out for extended relations, providing tight relations for pure as well as a generalized mixed input states: tightness of the relations for measurements on the two-level quantum system is demonstrated in the experiments.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Quantum theory is one of the most successful theory developed in 20th century. From the early stage of its development, the peculiarities of this theory have fascinated on one hand side, but upset and confused not only the interested public but also physicists on the other hand side. It works well if one accepts the formalism of quantum mechanics merely to make statistical predictions; lots of its users do not need to reflect on what is really going on behind the theory. Nevertheless, since both implication of experiments studying most essential and vital phenomena in quantum mechanics and design of the devices on the ground of fundamental features of quantum mechanics are becoming more and more complex and complicated, one can not emphasize the importance of an intellectual challenge to get deeper insight of quantum theory too much.
One of the essential consequence inherent in quantum theory is indeterminacy [1]: for instance, the path of a quantum particle propagating through a double-slit can not be revealed without washing out the interference fringes. Another kind of indeterminacy appears in the uncertainty principle: by using the famous \(\gamma \)-ray microscope thought experiment, Heisenberg formulated the uncertainty relation as a limitation of accuracies of position and momentum measurements [2]. He formulated the uncertain relation as \(p_1 \cdot q_1\sim h\), where \(q_1\) and \(p_1\) represent “the mean error” of the position measurement and the “the discontinuous change” of the momentum, respectively. He claimed that this relation is a straightforward mathematical consequence of the canonical commutation rule \(qp-pq=i\hbar \) between position and momentum observables. Later, the uncertainty relation for the error of the position measurement \(\varepsilon (q)\) and the disturbance of the momentum measurement \(\eta (p)\) is reformulated as an inequality [3]
It is to be noted here that the error-disturbance uncertainty relation stems from physical consequence of an unavoidable and uncontrollable recoil through the interaction between the quantum object to be measured and the measurement apparatus.
Although the uncertainty relation in terms of standard deviation is more often mentioned as a standard uncertainty relation, this form for the position and momentum as \(\varDelta q\cdot \varDelta p\ge \frac{\hbar }{2}\) was derived afterwards [4,5,6]. It should be emphasized here that this notion of uncertainty relation denotes only the statistical quantity, which is of significant only in repeated measurements, and is relevant to neither the error of the measurement nor the disturbance due to interactions in a quantum measurement. Later on, Robertson generalized the relation between standard deviations for arbitrary pairs of observables as
where \([A, B] = A B- B A\) stands for the commutator between the two operators A and B. The physical content of this relation refers only to fact that the product of the root-mean-square half-widths of the two statistical distributions of (not a joint but) a single (repeated) measurement either A or B on lots of equivalently prepared states can never be less than \(\hbar /2\) [7].
In the seventies, complete difference formulation of uncertainty relation in terms of entropy, which denotes bounds on the entropy of the measurement outcomes, was derived for position and momentum [8], followed by a generalization for any pairs of observables [9]. The improved version [10], which is proved in [11], has the form
where H(A) [H(B)] denotes the Shannon entropy of the probability distribution of the outcome and \(|a_j\rangle \) [\(|b_k\rangle \)] represent non-degenerating eigenstates of A [B]. Note that the uncertainty relation with entropy describes informational contents and does not refer to the interaction of quantum measurements.
A straightforward extension of the error-disturbance uncertainty relation for arbitrary pairs of observables A and B in a form
seems to be satisfactory and reasonable at the first sight. Nevertheless, it was known that the validity of Heisenberg’s original relation in this form is justified only under limited circumstances [12,13,14,15]. In order to quantify the accuracy of joint quantum measurements, it is essential to formulate a correct error-disturbance uncertainty relation.
2 First Experimental Investigation of the Error-Disturbance Uncertainty Relation
2.1 Theory
By applying rigorous and general theoretical treatments of quantum measurements, error-disturbance uncertainty relation was derived which is universally valid for arbitrary pairs of observables [16,17,18,19]. A new error-disturbance uncertainty relation (EDUR) is given in a form of
Note that the additional second and third terms imply a new accuracy limitation. Here, the error of the measurement of an observable A and the thereby induced disturbance on the measurement of an observable B are defined as

where \(|\xi \rangle \)[\(|\psi \rangle \)] denotes the initial state of the apparatus[the system to be measured], M is the meter observable and U describes the unitary evolution of the composite object-apparatus system through the measurement.
For projective spin measurements, the error and the disturbance can be simplified as

between the observables actually measured \(O_A\) [\(O_B\)] and the observables intended to be measured A [B], where  stands for the expectation value in the system state.
stands for the expectation value in the system state.

The product \(\varepsilon (A)\eta (B)\) of error and disturbance for \(|\psi \rangle =|+z\rangle \), \(A=\sigma _x\) and \(B=\sigma _y\). Points on the Bloch sphere represent the direction of \(O_A\). The bound of the inequality is indicated by the black solid line

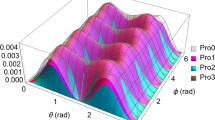
The three-terms sum \(\varepsilon (A)\eta (B)+\varepsilon (A)\sigma (B)+\sigma (A)\eta (B)\) for the same \(|\psi \rangle \), A and B as in Fig. 1. All points on the Bloch sphere have the boundary value above \(\frac{1}{2}\langle \psi |[A,B]|\psi \rangle =1\)
Here, the general results for successive 1/2-spin measurements of Pauli matrices are investigated. The operators are assigned for two 1/2-spin measurements in different directions \(\mathbf {a}\) and \(\mathbf {b}\): \(A=\mathbf {a} \cdot \mathbf {\sigma }, \quad B = \mathbf {b} \cdot \mathbf {\sigma }\), where \(\qquad \mathbf {\sigma }= (\sigma _x,\sigma _y,\sigma _z)^T\). The apparatus is actually supposed to perform a projective measurement along a distinct axis \(\mathbf {o}_a\). The output operator \(O_A\) is then given by \(O_A=\mathbf {o}_a \cdot \mathbf {\sigma }\). From these expressions, the error and the disturbance are expected to follow the relations
Both are thus independent of the input state, they are solely determined by the angle between the direction of the observable and the direction of the output operator. Due to the independence of the error and the disturbance from the input state, their product \(\varepsilon (A)\eta (B)\) is simply calculated from the relative orientation of \(\mathbf {a}, \mathbf {b}\) and \(\mathbf {o}_a\). The behavior of the error-disturbance product, appearing in Eq. (4), is depicted on the Bloch sphere for fixed as \(A[B] =\sigma _x[\sigma _y]\) and \(|\psi \rangle =|+z\rangle \) (see Fig. 1). In comparison, the three-terms sum of the new inequality given by Eq. 5 is plotted in Fig. 2 While the Heisenberg-term \(\varepsilon (A)\eta (B)\) shows violation of the inequality in some regions, the three-terms sum appearing in Eq. 5 is always above the boundary value.
2.2 Experimental Scheme
Here, the validity of two forms of error-disturbance relations, Eqs. (4) and (5) are experimentally tested in neutron’s successive 1/2-spin measurements. We applied so-called a three-state method: three independent states are sent to the apparatus to determine the error and the disturbance, which overcomes the operational obstacles. Note that, this three-state method is a kind of process tomograph, which resolves further extent of the characteristics of the measurement operators. For projective \(\frac{1}{2}\)-spin measurements, which is realized in the experiment, quadratic form of the error and the disturbance are given as the sum of expectation values of three different states:

These relations suggest that error and disturbance are solely determined by expectation values of experimentally accessible operators for various input states. For determination of the error \(\varepsilon (A)\), three input sates, \(|\psi \rangle ,A|\psi \rangle \), and  should be sent to the apparatus and expectation values are measured ; for the determination of the disturbance \(\eta (B)\), other combination \(|\psi \rangle ,B|\psi \rangle \), and
should be sent to the apparatus and expectation values are measured ; for the determination of the disturbance \(\eta (B)\), other combination \(|\psi \rangle ,B|\psi \rangle \), and  should be used.
should be used.

Experimental scheme of the first test of the error-disturbance uncertain relation
The experimental scheme is depicted in Fig. 3. Three states are generated in a preparation stage; these are sent to a measurement apparatus M1 carrying out the \(O_A\) measurement and a second apparatus M2 performing the B measurement. The two projective measurement of \(O_A\) and B result in four possible outcomes. Four intensities (\(I_{j,k}\) with \(j,k=\pm \)) are measured; The indices \((++)\), \((+-)\), \((-+)\), and \((--)\) of the output ports represent the direction of projections. Therefore, for instance, the expectation value of \(O_A\) in a state \(|\psi \rangle \) is calculated from these four intensities at the four possible output ports to be
Since the prior measurement of \(O_A\) modifies the measurement operator of M2 from B to \(X_{B}\), the expectation values of \(X_B\) used for the determination of the disturbance are calculated as
All expectation values for the determination of error \(\varepsilon \) and disturbance \(\eta \) can thus be derived from the output intensities with the input states of \(|\psi \rangle \), \(A|\psi \rangle \),  , \(B|\psi \rangle \), and
, \(B|\psi \rangle \), and  to be sent to the joint measurement apparatuses M1 and M2. Note that, a different method for the experimental demonstration of the EDUR was proposed that exploits the weak-measurement technique [20].
to be sent to the joint measurement apparatuses M1 and M2. Note that, a different method for the experimental demonstration of the EDUR was proposed that exploits the weak-measurement technique [20].

Depiction of the experimental setup of the neutron optical test of error-disturbance uncertainty relation. The incident spin is set to be polarized to +z, followed by two measurements. While we set \(A=\sigma _x\), \(B=\sigma _y\) in the first measurement and \(B=\sigma _x \cos (5\pi /6) + \sigma _y \sin (5\pi /6)\) in the second measurement. In the experiment, the observable of the first measurement is detuned by \(O_A\)
The universally valid EDUR (Eq. 5) additionally contains the standard deviations of A and B in the state \(|\psi \rangle \): in our measurements, these are easily calculated to be
That is, the standard deviation can be determined from the (single) expectation value of the measurement A[B] for the input state \(|\varPsi \rangle \).
2.3 Experimental Results
The experiment was carried out at the research reactor facility TRIGA Mark II of the TU-Vienna. The schematic view of the experimental setup is depicted in Fig. 4. The monochromatic neutron beam is polarized through a super-mirror polarizer and two other super-mirrors are used as analyzers. The guide field together with four DC spin rotator allows state preparation and projective measurements of \(O_A\) in M1 and B in M2. Observables A and B are set as \(\sigma _x\) and \(\sigma _{\phi _B}\) (an observable lying on the equator with the azimuthal angle \(\phi _B\) of the Bloch sphere). The initial state \(|\varPsi \rangle \) is set to be +z spin state, \(|+z\rangle \). In order to observe dependence of the error \(\varepsilon (A)\) and the disturbance \(\eta (B)\) on the output observable, \(O_A=\sigma _x \cos {\phi } + \sigma _y \sin {\phi }\) (instead of exactly measuring \(A=\sigma _{x}\)), the apparatus M1 is designed to actually carry out measurements of adjustable observables. To test the new and old error-disturbance uncertainty relation, the error \(\varepsilon (A)\), the disturbance \(\eta (B)\) and the standard deviations \(\varDelta (A)\), \(\varDelta (B)\), are determined from the data. The error \(\varepsilon (A)\) and the disturbance \(\eta (B)\) are determined by successive projective measurements utilizing M1 and M2, while the measurements of the standard deviations \(\varDelta (A)\) and \(\varDelta (B)\) are carried out by single M1 and M2 measurements.

Experimentally determined uncertainty. Trade-off relation between error and disturbance is clearly seen (left). Demonstration of the violation of the Heisenberg’s uncertainty relation and the validity of the new relation given by Eq. 5 (right)

Experimentally determined values of the universally valid uncertainty relation, (i) \(\varepsilon (A)\eta (B)+\varepsilon (A)\varDelta (B)+\varDelta (A)\eta (B)\) (orange) and (ii) \(\varepsilon (A)\eta (B)\) (red) as a function of the detuning angle \(\phi \). (a)\(B=\sigma _y\) (left) and (b) \(B=\sigma _x \cos (5\pi /6) + \sigma _y \sin (5\pi /6)\) (right)
First, trade-off behavior of the error and the disturbance is investigated by setting the \(B=\sigma _y\) and adjusting the detuning angle \(\phi =[0,\frac{\pi }{2}]\). The result is depicted in Fig. 5 on the left side: clear trade-off relation between the error \(\varepsilon (A)\) and the disturbance \(\eta (B)\) is seen. Note that, the observable \(O_A\) coincides with A at \(\phi =0\), which results in the error of 0, and the zero disturbance at \(\phi =\frac{\pi }{2}\) due to the fact that \(O_A=B\). Next the validity of the new and the old EDUR is studied: the results is plotted in Fig. 5 on the right side. It is explicitly seen in this plot that, although the three-terms sum is always above the boundary value, the Heisenberg’s product is below the boundary. This first experimental test of the EDUR is reported in [21].
Further, we proceed the measurements with more general parameters. Two cases of the results are shown in Fig. 6: (a) \(B=\sigma _y\) and (b) \(B=\sigma _x \cos (5\pi /6) + \sigma _y \sin (5\pi /6)\). The azimuthal angle of \(\phi _{OA}\) of the output observable \(O_A\) is varied between 0 and \(2\pi \). The Heisenberg error-disturbance product \(\varepsilon (A)\eta (B)\) and the three-terms sum \(\varepsilon (A)\eta (B)+\varepsilon (A)\varDelta (B)+\varDelta (A)\eta (B)\) are plotted as a function of the detuned azimuthal angle \(\phi _{OA}\). These plots confirm the fact that the newly introduced three-rems sum is always larger than the boundary whereas the Heisenberg product is often below the limit. In Fig. 6 (b), the situation is observed where the universally expression actually touches the limit, which corresponds to the case where the equal sign of the inequality Eq. (5) really occurs. More detailed behavior of the error, disturbance, Heisenberg’s product, and the three-terms sum is reported in our publications [22]. After the first experimental tests of the EDUR with neutrons, other investigations using photonic system appeared [23,24,25].
3 Experimental Studies of the Error-Disturbance Uncertainty Relation for Pure and Mixed States
3.1 Tight Relation for the Error-Disturbance
In pursuit of an improvement of EDUR, Branciard introduced a stronger inequality [26]
Experimental tests of this relation for pure input states were carried out by using photonic systems [27, 28] and neutrons [29]. An easy extension of the bound \({C}_{AB}\) in the EDURs to \(C'_{AB} = \frac{1}{2}\vert \text {Tr} ([A,B] \rho ) \vert \) leads to a disappearance of uncertainty for totally mixed ensembles [30]; this extension for the mixed states turned out to be unsustainable. Next improvement of the bound was put forward by Ozawa [31]; \(C_{AB}\) in Eq. (13) can be replaced by a stronger quantity \(D_{AB}\) defined as \(D_{AB}= \frac{1}{2} \text {Tr}\left( |\sqrt{\rho } [A,B] \sqrt{\rho }|\right) \). This new parameter coincides with the Robertson’s bound \(\text {C}_{AB}\) when \(\rho \) is a pure state, but makes the EDUR in the form of Eq. (13) stronger for a mixed ensemble. This new relation is experimentally tested, which confirmed its validity: the experiments studied the residual character of the uncertainty for mixed ensemble [32].
For simplicity, we study here the case where spin-\(\frac{1}{2}\) observables, represented by a set of Pauli operators, have been a major focus of investigations of EDURs. For binary measurements with \(A^2 = B^2 = \mathbbm {1}\) and  , where
, where  stands for the expectation value in the system state, Eq. (13) can be strengthened to a stronger EDUR [26].
stands for the expectation value in the system state, Eq. (13) can be strengthened to a stronger EDUR [26].
where \(\hat{\varepsilon }_A=\varepsilon (A)\sqrt{1-{\varepsilon (A)^2}/{4}}\) and \(\hat{\eta }_B\,{=}\,\eta (B)\sqrt{1\,{-}\,{\varepsilon (B)^2}/{4}}\), Ozawa demonstrated that replacement of the bound \(C'_{AB}\) by \(D_{AB}\) improves the inequality in the binary case as well [31].
In the experiments, A and B are set \(\sigma _z\) and \(\sigma _y\), respectively; a mixed ensemble \(\rho _x(\alpha ) = \frac{1}{2}(\mathbbm {1}+\alpha \sigma _x)\) satisfying  is considered. In this case, the bound \(D_{AB}=1\) is constant and yields the tight relation [31]
is considered. In this case, the bound \(D_{AB}=1\) is constant and yields the tight relation [31]
for any \(\rho _x(\alpha )\) independent of the mixture of the state, while the bound \({C}'_{AB}\) does depend on the parameter \(\alpha \).
3.2 Experimental
Based on the previous performance of the studies of the EDUR for pure states described in the previous section, we extend here the investigation by applying two procedures, i.e. the generation of mixed states and modification of the first measurement at apparatus M1 by adding correction procedure given by an unitary transformation of the output states. The former allows the study of the EDUR for mixed states and the latter enables to increase/decrease the disturbance. The polarimeter setup consists of three stages: (1) state preparation, (2) apparatus M1 performing a projective \(O_A\) measurement plus the correction procedure and (3) apparatus M2 performing the B measurement. The mixing of the state can be tuned by a noise magnetic field \(B_{\text {noise}}\), which had been used in the former experiment [33]. In practice, \(\pi /2\)-rotations with noisy fields is realized by one DC-coil. In the correction stage, the influence of an unitary transformation \(U^\mathrm{corr}\) on the output state \(|O_A = \pm 1\rangle \) is studied. Thereby, an optimal (and anti-optimal) correction by adjusting \(U^\mathrm{corr}\) is to be seen.

Error-disturbance uncertainty relation as indicated by inequality Eq. (15)) measured with pure states. Not only the lower but also upper bounds of the disturbance are found: in squared plot, boundary is assigned on the circle
First, pure input states are generated and the detuning angle is fixed. Then, the eigenstate of \(O_A\) after apparatus M1 is unitarily transformed to the state \(|\psi (\vartheta , \phi )\rangle = \left( \text {cos}(\vartheta /2), e^{\text {i} \phi } \text {sin}(\vartheta /2)\right) ^T\): the minimal disturbance is realized. In contrast, the state after apparatus M1 is transformed to the orthogonal state of \(|\psi (\vartheta , \phi )\rangle \), the maximum disturbance is realized. After determination of the disturbance-minimizing/maximizing unitary transformations, the EDUR given by Eq. (15) is analyzed. The experimentally determined error versus maximum and minimum disturbances together with the theoretically predicted bound are plotted in Fig. 7. The red shaded area represent the forbidden region. The lower and upper bound was measured by adjusting the detuning angle \(\theta _{OA}=[0,\pi ]\). At \(\theta _{OA} = 0\), the error \(\varepsilon (A)\) becomes 0 at which point the disturbance is unique. When \(\theta _{OA}=\pi /2\) \((O_A=B)\), the disturbance reaches it’s [maximum]minimum value, depending on the unitary [anti-]optimal correction transformation. When \(\theta _{OA} = \pi \), \(O_A = - A\) and the error is maximal and disturbance is independent of the transformation once again.

Error \(\varepsilon (A)\) versus disturbance \(\eta (B)\) for the standard configuration \((A = \sigma _z, B = \sigma _y)\) with four different mixtures of the state \(\rho _x (\alpha ) = \frac{1}{2}(\mathbbm {1}+\alpha \sigma _x)\): \(\alpha = (a)0.75\), (b)0.5, (c)0.25 and (d)0. The red shaded areas are forbidden according to Eq. (15)
Next, the influence of the mixture of the input states is studied with applying the optimal correction procedure for minimal disturbances. The results are plotted in Fig. 8. Each plot exhibits optimal EDUR for a particular mixture with theoretical predictions by \(D_{AB}\) and \(C'_{AB}\). It is immediately be seen that the error-disturbance uncertainty is insensitive to dephasing or amplitude damping of the input states; the bound is unchanged. The measured values always saturate inequality Eq. (15): only the bound given by \(D_{AB}\) leads to saturation of the error-disturbance uncertainty relation. This statement is also true for different configurations of the observables A and B. Results for more arbitrary choices of the observables are reported in [32].
The experiment successfully confirms the validity of the tight bound \(D_{AB}\) and the non-tightness of the simply extended Robertson bound \(C'_{AB}\). The independence of the EDUR on the mixture of the states is demonstrated for the case of dichotomic observables A, B with  . Successive 1/2-spin measurement is implicated in the experiment, where the function of the correction procedure, i.e. realized by a unitary transformation of the output state of the first apparatus, is obviously seen in incorporation to the whole measurement. Note that, this kind of effect is unaccessible in the experiment reported in [27], due to insensibility of polarization[spin]-direction of the output state. Since the measurements for mixed states, in particular for states with lower purity, require high precision and accuracy of the instrument, we emphasize the use of the three-state tomography, which profitably satisfies these requirements.
. Successive 1/2-spin measurement is implicated in the experiment, where the function of the correction procedure, i.e. realized by a unitary transformation of the output state of the first apparatus, is obviously seen in incorporation to the whole measurement. Note that, this kind of effect is unaccessible in the experiment reported in [27], due to insensibility of polarization[spin]-direction of the output state. Since the measurements for mixed states, in particular for states with lower purity, require high precision and accuracy of the instrument, we emphasize the use of the three-state tomography, which profitably satisfies these requirements.
4 Discussions
4.1 Ex-post Uncertainty Relations
The neutron’s successive 1/2-spin measurement is the first experimental test of the EDUR. The validity of the new relation (Eq. (5)) proposed as a universally valid error-disturbance relation is confirmed. Furthermore the failure of the old relation as a reciprocal relation between the error and the disturbance is also demonstrated. This experiment stimulated advanced studies on the EDUR from the experimental as well as the theoretical view points. All measurements, other than ours, concern photon’s polarization, which is described as a two-level quantum system in the same manner as the neutron’s 1/2-spin. Now, more than 80 years after the publication of the first account of the uncertainty principle by Heisenberg, uncertainty relations have become again a hot topic in quantum physics. The uncertainty relations in terms of standard deviations is related with the state, which in turn accounts for the limitation of the precise preparation of a quantum system. In contrast, EDUR gives an explanation for the unavoidable influence of measuring instruments on quantum systems. It should be emphasized here that these two notations have physically completely different contents; two notations should not be mixed-up but be dealt individually.
In writing the paper, we actually regard it fair to say that “our result demonstrates that the new relation solves a long-standing problem of describing the relation between measurement accuracy and disturbance, and sheds light on fundamental limitations of quantum measurements, for instance on the debate of the standard quantum limit for monitoring free-mass position” [21]. Nevertheless, ex-post facto critical analysis appeared [34]: for instance, state-dependence of the error and the disturbance by Ozawa is claimed and state-independent definitions of error and disturbance are proposed to reconstruct the error-disturbance uncertainty relation in the same form as the original one proposed by Heisenberg [35]. For the alternatively defined error and disturbance, there are “state independent, each giving the worst-case estimates across all states”. This allows overestimate of the measurement error and disturbance. This claim is immediately criticized [36, 37]: physical analysis in the former figures out the new definition as “disturbance power” and mathematical consideration in the latter reveals breakdowns of the new definition.
Furthermore, a paper is published which deal with “operational constraints” on the measures of the error and disturbance [38]. It is stated that, since “only the change in the measurement statistics can be detected by the measurement,” “a measurement cannot be treated as disturbed if its outcome statistics is identical to the one for the perfect measurement.” (underlines given by the author) Note that, the fact that this view does not accomplish its intended purpose is clearly seen in the first experimental test of EDUR: as we already emphasized as “It is worth noting that the mean value of the observable A is correctly reproduced for any detuning angle \(\phi \), that is, \(<+z|O_A|+z> =<+z|A|+z>\), so that the projective measurement of \(O_A\) reproduces the correct probability distribution of A, whereas we can detect the non-zero r.m.s. error \(\varepsilon (A)\) for \(\phi \ne 0\).” Reference [21], it is physically reasonable that the difference of the observable \(O_A \ne A\) for \(\phi \ne 0\), which is realized in the experiment, leads to the error of the measurement, even though the output statics of the measurements are identical. The author of the present paper often mentioned the case when one considers, for instance, an apparatus which (is broken and) always gives the results of the measurement as (+1) and (–1) with a fifty-fifty chance: can one regard this not a causal but an accidental coincidence as (physically) error-free? As far as physical consequences are concerned, causal differences, which can appear even in an operational form, are resources of the measurement error/disturbance. Modern quantum measurement schemes, i.e. process tomography or that in combination with weak-values, can actually reveal the operational difference. The functional differences, emerging only in the final results, can be considered as informational aspects of the measurements. Indeed, another form of noise-disturbance uncertainty relation in context of information-theoretic approach is derived [39, 40], where the correlations of the measurement results are considered as the resource. Let us clarify this treatment in more detail.
4.2 Information-Theoretic Noise-Disturbance Uncertainty Relation
It is very natural to seek a formulation of the uncertainty principle in terms of the information gained and lost due to measurement. Such a formulation was recently introduced by Buscemi et al. [39]. In their treatment, noise and disturbance are quantified not by a difference between a system observable and the quantity actually measured, but by the correlations between input states and measurement outcomes. A tight uncertainty relation is derived for information-theoretic noise and disturbance, in the qubit case, and demonstrate its validity in a neutron polarimeter experiment [40].
Consider an observable A with eigenvalues \(\alpha \) belonging to the non-degenerate eigenstates \(|a\rangle \) and a measurement apparatus \(\mathcal M\) representing a quantum instrument [41,42,43] with possible outcomes \(\mu \). All eigenstates \(|a\rangle \) of A are now fed with equal probability into the apparatus, which is schematically illustrated in Fig. 9. The conditional probability \(p(\alpha |\mu )\) for the input eigenstate \(|a\rangle \) and a specific measurement outcome \(\mu \) and the marginal probability \(p(\mu )\) for occurrence of the specific outcome are used to define the information-theoretic noise \(N(\mathcal M, A)\) as
This equation represents the conditional entropy \(H(\mathbb {A}|\mathbb {M})\), where \(\mathbb {A}\) and \(\mathbb {M}\) denote the classical random variables associated with input \(\alpha \) and output \(\mu \). The information-theoretic noise thus quantifies how well the value of A can be inferred from the measurement outcome and only vanishes if an absolutely correct guess is possible.

The concept for determination of noise and disturbance. The information-theoretic noise \(N(\mathcal M, A)\) and disturbance \(D(\mathcal M, B)\) are calculated using the conditional probabilities \(p(\alpha |\mu )\) and \(p(\beta |\beta ^\prime )\), respectively
The information-theoretic disturbance is defined in a similar manner as
Here uniformly distributed eigenstates \(|b\rangle \) of an observable B are input to the apparatus \(\mathcal M\), and a subsequent measurement of B is performed, with outcomes labeled by \(\beta '\) (see Fig. 9). The disturbance \(D(\mathcal M, B)\) thus quantifies the correlation between the initial and final values of B, and is a measure of how much information about B is lost through the measurement \(\mathcal M\).
In order to determine the irreversible loss of information about B, a correction operation \(\mathcal {C}\) can be performed before the B-measurement to decrease the disturbance (see again Fig. 9), and consists of any completely positive, trace preserving map. Two cases are shown here; one is the uncorrected disturbance which we write as \(D_0\) and the other is the optimally corrected disturbance denoted as \(D_\mathrm{opt}\) corresponding to the correction operation that minimizes the disturbance. For any correction procedure the information theoretic noise and disturbance fulfil the following uncertainty relation [39]
where \(| a\rangle \) and \(| b\rangle \) denote the eigenstates of the observables A and B. For maximally incompatible qubit observables, represented by the Pauli matrices \(\sigma _z\) and \(\sigma _y\), we have been able to significantly strengthen this relation to the tight relation
Here g[x] denotes the inverse of the function h(x) on the interval \(x \in [0,1]\) given by
As the study of the uncertainty relations given by Eqs. (18) and (19) the noise and the disturbance determined in the experiments are plotted in Fig. 10. One immediately sees that the noise-disturbance uncertainty relation Eq. (18) is always fulfilled, but not saturated apart from extremal values, i.e. either N or D equal to 0. In contrast, the improved relation Eq. (19) valid for qubits provides a tight bound and is saturated if the optimal correction procedure is applied.

Disturbance versus Noise with and without optimal correction procedure. The red shaded area marks the region which are prohibited according to Eq. (19)
In this experiment, the validity of the information-theoretic formulation of noise-disturbance uncertainty relation is confirmed in the case of qubit measurements. Trade-off relation is again seen in this formulation: in particular, a completely reciprocal trade-off relation is observed for maximally incompatible combination of 1/2-spin observables. The obtained result is expected to stimulate the search for improved entropic uncertainty relations for observables of higher dimensional Hilbert spaces. Note that, in the scenario used in this experiment, content of the outcome statics is characterized: functional character of the measurement accounts for the uncertainty here. Two different considerations of the uncertainty are described in this article: one concerns error-disturbance and the other does noise-disturbance, of the uncertainty in a quantum measurement. The former characterize particularly the operational consequence of the quantum measurement and the latter does the functional. We hope, experimental investigations described here helps to clarify the physical contents of each uncertainty.
5 Concluding Remarks
Neutron optical investigations of the uncertainty relation as a fundamental limitation of quantum mechanics are presented here. Neutron’s 1 / 2-spin is exploited: high-reliable demonstrations are accomplished owing to manipulation and measurement of the spin with high efficiency and precision. No other experimental studies have been reported before the first experimental test of the error-disturbance uncertainty relation presented here. The experiment has provided the first evidence for the invalidity of the old (à la Heisenberg) and validity of the new (by Ozawa) uncertainty relation for measurements. Although, we thought, our result clarifies a long standing problem of describing the relation between measurement accuracy and disturbance, and sheds light on fundamental limitations of quantum measurements, there appeared not only the extension but also counter-arguments, some of which we mention and give a critique here. It would be fair to say that the experiment of ours opens up a new era of the study of uncertainty relations: our experiment activates this research field. More than four-decades after the Heisenberg’s original publication, uncertainty in quantum mechanics is covered with new aroma and flavor and taken up again for hot discussions both from the theoretical and experimental point of view.
References
J.A. Wheeler and W.H. Zurek (eds), Quantum Theory and Measurement, Princeton Univ. Press, (1983).
W. Heisenberg, Z. Phys. 43, 172 (1927).
W. Heisenberg, The Physical Principles of Quantum Mechanics (University of Chicago Press, Chicago, IL, 1930).
E.H. Kennard, Z. Phys. 44, 326 (1927).
H. P. Robertson, Phys. Rev. 34, 163 (1929).
H.P. Robertson, Sitzungsberichte der Preussischen Akademie der Wissenschaften14, 296 (1930); ibid. Rev. Mod. Phys. 42, 358 (1970).
L.E. Ballentine, Quantum Mechanics
I. Bialiniki-Birula and J. Mycielsky, Commun. Math. Phys.44, 129 (1975)
D. Deutsch, Phys. Rev. Lett. 50,631 (1983).
K. Kraus, Phys. Rev. D 35, 3070 (1987).
H. Maassen and J. B. M. Uffink, Phys. Rev. Lett. 60, 1103 (1988)
E. Arthurs, and J.L. Kelly, Bell Syst. Tech. J. 44, 725 (1965).
E. Arthurs, and M.S. Goodman, Phys. Rev. Lett. 60, 2447 (1988).
S. Ishikawa, Rep. Math. Phys. 29, 257 (1991).
M. Ozawa, (eds. C. Bendjaballah, O. Hirota, and S. Reynaud) (Lecture Notes in Physics, Vol. 378, 3, Springer, 1991).
M. Ozawa, Phys. Rev. A 67, 042105 (2003).
M. Ozawa, Phys. Lett. A 318, 21 (2003).
M. Ozawa, Ann. Phys. 311, 350 (2004).
M. Ozawa, J. Opt. B 7, S672 (2005).
A.P. Lund and H.M. Wiseman, New J. Phys. 12, 093011 (2010).
J. Erhart, S. Sponar, G. Sulyok, G. Badurek, M. Ozawa and Y. Hasegawa, Nature Phys. 8, 185 (2012).
G. Sulyok, S. Sponar, J. Erhart, G. Badurek, M. Ozawa and Y. Hasegawa, Phys. Rev. A 88, 022110 (2013).
L.A. Rozema, A. Darabi, D.H. Mahler, A. Hayat, Y. Soudagar, and A.M. Steinberg, Phys. Rev. Lett. 109, 100404 (2012).
S.Y. Baek, F. Kaneda, M. Ozawa, and K. Edamatsu, Sci. Rep. 3, 2221 (2013).
M.M. Weston, M.J.W. Hall, M.S. Palsson, H.M. Wiseman, and G.J. Pryde, Phys. Rev. Lett. 110, 220402 (2013).
C. Branciard, Proc. Natl. Acad. Sci. U.S.A. 110, 6742 (2013).
M. Ringbauer, D.N. Biggerstaff, M.A. Broome, A. Fedrizzi, C. Branciard, and A.G. White, Phys. Rev. Lett. 112, 020401 (2014).
F. Kaneda, S.Y. Baek, M. Ozawa, and K. Edamatsu, Phys. Rev. Lett. 112, 020402 (2014).
S. Sponar, G. Sulyok, J. Erhart, and Y. Hasegawa, Adv. High Energy Phys. 44, 36 (2015).
C. Branciard, Phys. Rev. A 89, 022124 (2014).
M. Ozawa, arXiv:1404.3388v1 [quant-ph] (2014).
B. Demirel, S. Sponar, G. Sulyok, M. Ozawa, and Y. Hasegawa, Phys. Rev. Lett. 117, 140402, (2016). https://doi.org/10.1103/PhysRevLett.117.140402.
For instance, J. Klepp, S. Sponar, S. Filipp, M. Lettner, G. Badurek and Y. Hasegawa, Phys. Rev. Lett. 101, 150404 (2008).
for instance, see references in Lu X.-M. , Yu S., Fujikawa K., and Oh C. H., Phys. Rev. A 90, 042113 (2014).
P. Busch, P. Lahti, and R.F. Werner, Phys. Rev. Lett. 111, 160405 (2013).
L.A. Rozema, D.H. Mahler, A. Hayat, and A.M. Steinberg, arXiv:1307.3604 (2013).
M. Ozawa, arXiv:1308.3540 (2013).
K. Korzekwa, D. Jennings, and T. Rudolph, Phys. Rev. A 89, 052108 (2014).
F. Buscemi, M.J.W. Hall, M. Ozawa, and M.M. Wilde, Phys. Rev. Lett. 112, 050401 (2014).
G. Sulyok, S. Sponar, B. Demirel, F. Busemi, M.J.W. Hall, M. Ozawa, and Y. Hasegawa, Phys. Rev. Lett. 115 030401 (2015).
E. B. Davies and J. T. Lewis, Communications in Mathematical Physics 17, 239 (1970).
E. B. Davies, Quantum theory of open systems (Academic Press London, New York).
M. Ozawa, J. Math. Phys. 25, 79 (1984).
Acknowledgements
It is great pleasure and honor of the author to present a review article on the recent experimental investigations of the uncertainty relation with neutrons in this issue of the journal. This research has been done in close cooperation between neutron optics group in Vienna and Prof. Masanao Ozawa. The author thanks all colleagues who were involved in carrying out the experiments presented here; in particular, we appreciate M. Ozawa, F. Busemi, B. Demirel, J. Erhart, M.J.W. Home, A. Hosoya, G. Sulyok and S. Sponar. This work was partially supported by the Austrian FWF (Fonds zur Föderung der Wissenschaftlichen Forschung) through grant numbers P27666-N20. Some parts of the results presented here have appeared in earlier publications.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Hasegawa, Y. (2018). Experimental Investigations of Uncertainty Relations Inherent in Successive \(1/2-\)Spin Measurements. In: Ozawa, M., Butterfield, J., Halvorson, H., Rédei, M., Kitajima, Y., Buscemi, F. (eds) Reality and Measurement in Algebraic Quantum Theory. NWW 2015. Springer Proceedings in Mathematics & Statistics, vol 261. Springer, Singapore. https://doi.org/10.1007/978-981-13-2487-1_12
Download citation
DOI: https://doi.org/10.1007/978-981-13-2487-1_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-2486-4
Online ISBN: 978-981-13-2487-1
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)