
Abstract
Fault Detection and Isolation (FDI) techniques in robot manipulator is becoming one of the most phenomena in robotics in order to ensure higher levels of safety and productivity. Research, has been produced a considerable effort in seeking systematic approaches to fault detection for both linear and nonlinear dynamical systems. In the last decade considerable research efforts have been spent to seek for systematic approaches to Fault Detection (FD) in dynamical systems. Special attention has been addressing for robotic systems, especially for those operating in remote or hazardous environments, where a high degree of safety as well as self-detection capabilities are required. On the other hand, the development of effective strategies of fault detection for robot manipulators operating in an industrial context is a critical research task. Several FD techniques for robot manipulators have been proposed in the literature, although the problem of their application to industrial robots has not been extensively investigated.
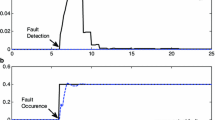
In this chapter, we present a high-gain observer based fault detection and isolation scheme for a class of affine nonlinear systems. In order to test the effectiveness and the robustess of the proposed approach, a case study is developed for a special robot manipulator named Articulated Nimble Adaptable Trunk “ANAT” with a five-degree-of-freedom in order to detected and isolated sensor fault.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Busawon, K., Farza, M., & Hammouri, H. (1998). Observer design for a special class of nonlinear systems. International Journal of Control, 71, 405–418.
Craig, J. J. (1989). Introduction to robotics: Mechanics and control (2nd ed.). Boston: Addison-Wesley Longman Publishing, Inc.
Dixon, E., Warren, W., Ian, D., Dawson, D. M., & Hartranft, J. P. (2000). Fault detection for robot manipulators with parametric uncertainty: A prediction-error-based approach. IEEE Transactions on Robotics and Automation, 16(6), 689–699.
Esfandiari, F., & Khalil, H. (1987). Observer-based design of uncertain systems: Recovering state feedback robustness under matching conditions. In Allerton Conference, Monticello (pp. 97–106).
Farza, M., Hammouri, H., Jallut, C., & Lieto, J. (1999). State observation of a nonlinear system: Application to (bio) chemical processes. AICHE Journal, 45, 93–106.
Farza, M., M’Saad, M., & Rossignol, L. (2004). Observer design for a class of MIMO nonlinear systems. Automatica, 40, 135–143.
Farza, M., M’saad, M., & Sekher, M. (2005). A set of observers for a class of nonlinear systems. In International Federation of Automation Control-IFAC’05, Prague, 37.
Filaretov, V., Vukobratovic, M., & Zhirabok, A. (1999). Observer-based fault diagnosis in manipulation robots. Mechatronics, 9, 929–939.
Filaretov, V., Vukobratovic, M., & Zhirabok, A. (2003). Parity relation approach to fault diagnosis in manipulation robots. Mechatronics, 13, 141–152.
Frank, P. (1990). Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy? A survey and some new results. Automatica, 26, 459–474.
Frank, P. (1993). Advances in observer-based fault diagnosis. In TOOLDIAG’93, International Conference on Fault Diagnosis, Toulouse.
Gauthier, J., & Kupka, I. (2001). Observability and observers for nonlinear systems. SIAM Journal Control Optimisation, 32, 181–188.
Gauthier, J. P., Hammouri, H., & Othman, S. (1992). A simple observer for nonlinear systems – application to bioreactors. IEEE Transactions on Automatic Control, 37, 875–880.
Gauthier, J. P., Hammouri, H., & Othman, S. (2001). A simple observer for nonlinear systems – application to bioreactors. IEEE Transactions on Automatic Control, 37, 875–880.
Gertler, J. (1993). Residual generation in model-based fault diagnosis. Control Theory Advanced Technology, 9, 259–285.
Gertler, J., & Monajemy, R. (1995). The state of the art. Automatica, 31, 627–635.
Guernez, C., Cassar, J., & Staroswiecki, M. (1997). Process fault diagnosis based on modeling and estimation methods-a survey automatica. In IFAC Symposium SAFEPROCESS’97, Kingston upon Hull.
Hammouri, H., & Farza, M. (2003). Nonlinear observers for locally uniformly observable systems. ESAIM, 9, 353–370.
Hammouri, H., Busawon, K., Yahoui, A., & Grellet, G. (2001). A nonlinear observer for induction motors. European Physical Journal-Applied Physics, 15, 181–188.
Hou, M., Busawon, K., & Saif, M. (2000). Observer design for a class of MIMO nonlinear systems. IEEE Transactions on Automatic Control, 45, 1350–1355.
Isermann, R. (1984). Process fault diagnosis based on modeling and estimation methods-a survey automatica. International Federation of Automatic Control, 20, 387–404.
Jollie, I. T. (2016). Simultaneous fault diagnosis for robot manipulators with actuator and sensor faults. Information Sciences, 366, 12–30.
Khalil, H., & Praly, L. (2014). High-gain observers in nonlinear feedback control. International Journal of Robust and Nonlinear Control, 24, 993–1015.
Khalil, H., & Saberi, A. (2007). Adaptive stabilization of a class on nonlinear systems using high-gain feedback. IEEE Transactions on Automatic Control, 32, 1031–1035.
Koubaa, Y., Farza, M., & M’saad, M. (2004). Obsevateur adaptatif pour une classe des systèmes non linéaires. In 5th Conférence Internationale des Sciences et Techniques de l’Automatique, STA’04.
Krishnaswami, V., & Rissoni, G. (1994). Nonlinear parity equation residual generation for fault detection and isolation. In IFAC Symposium SAFEPROCESS’94, Espoo (Vol. 1, pp. 317–322).
Ma, H. J., & Yang, G. H. (2016). Simultaneous fault diagnosis for robot manipulators with actuator and sensor faults. Information Sciences, 366, 12–30.
Mironovsky, L. (1989). Functional diagnosis of nonlinear discrete-time processes. Autom Remote Control, 6, 150–157.
Nadri, M. (2001). Observation et commande des systèmes non linéaires et application aux bioprocédés. Thèse de doctorat, Université Claude Bernard Lyon-1.
Patton, R. (1994). The state of the art. In IFAC Symposium SAFEPROCESS’94, Espoo (Vol. 1, pp. 1–24).
Saberi, A., & Sannuti, P. (1990). Observer design for loop transfer recovery and for uncertain dynamical systems. IEEE Transactions on Automatic Control, 35, 878–897.
Schneider, H., & Frank, P. M. (1996). Observed- based supervision and fault detection in robots using nonlinear and fuzzy logic residual evaluation. IEEE Transactions on Control Systems Technology, 4(3), 274–282.
Shim, H., Son, Y., & Seo, J. (2001). Semi-global observer for multi-output nonlinear systems. Systems and Control Letters, 42, 233–244.
Shumsky, A. (1998). Parity relation method and its application to fault detection in nonlinear dynamic systems. Automation and Remote Control, 9, 155–165.
Slotine, J. J., & Weiping, L. (1991). Applied nonlinear control. Englewood Cliffs: Printice-Hall International.
Tornambe, A. (1988). Use of asymptotic observers having high gains in the state and parameter estimation. In 27th IEEE Conference on Decision and Control, Austin (pp. 1791–1794).
Tornambe, A. (1992). High-gain observers for non-linear systems. International Journal of Systems Science, 23, 1475–1489.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Omali, K.O., Kabbaj, M.N., Benbrahim, M. (2019). Nonlinear Observer-Based Fault Detection and Isolation for a Manipulator Robot. In: Derbel, N., Ghommam, J., Zhu, Q. (eds) New Developments and Advances in Robot Control. Studies in Systems, Decision and Control, vol 175. Springer, Singapore. https://doi.org/10.1007/978-981-13-2212-9_7
Download citation
DOI: https://doi.org/10.1007/978-981-13-2212-9_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-2211-2
Online ISBN: 978-981-13-2212-9
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)