
Abstract
In this paper the issue of control strategies for the doubly fed induction generator (DFIG) is addressed in a wind energy production. The active and reactive power between the stator of DFIG and the grid are controlled independently by using a novel linear control scheme called the Active Disturbance Rejection Control (ADRC) based on the extended state observer (ESO) in order to ensure the decoupling of the system from the actual disturbance acting on the plant. In order to maximize the power of wind energy conversion, the use of MPPT control is indispensable. Finally, a numerical simulation with MATLAB/Simulink confirms the performance of the proposed controller.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Active Disturbance Rejection Control
- Doubly-fed induction generator
- Extended state observer
- Wind turbine
- Maximum power point tracking (MPPT)
1 Introduction
In recent years, there has been an evolution of the electricity production based on wind energy. As a result, the wind energy is the subject of several researches. Although this energy source is inexhaustible and environmental friendly, its relatively cost stay interesting and its efficiency is still low compared to conventional sources [1,2,3,4].
The DFIG is broadly used for variable speed wind power generation system thanks to its several advantages over other generators. These advantages are easiness of speed control, operation at over a large range of wind speeds of 30% around the synchronous speed and an inverter rated at 20–30% of the total system power [2,3,4, 6, 8]. Contrary, the DFIG is subject to many constraints, such as the effects of parametric uncertainties (due to overheating, saturation …) and the disturbance of the speed variation, which could divert the system from its optimal functioning. Therefore, the control of DFIG has become a very important research subject [4, 11].
In this paper we start with the description and modeling the components of the Wind Energy Conversion System based on the DFIG. Then, a special linear control system called ADRC is applied to the control of the rotor side converter and tested at a variable wind speed. Finally, we conclude our work by interpretations of the simulation results.
2 Modeling of the Wind Energy Conversion System
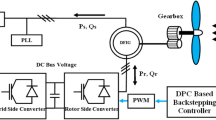
Our wind energy conversion system is shown in Fig. 1 [1,2,3,4].

Model of the variable speed wind turbine conversion chain.
2.1 Wind Turbine
The turbine transforms the wind energy into a mechanical energy. The aerodynamic power available on a wind turbine rotor is given by the following equation [1,2,3,4,5,6]:
Where ρ is the air density, R is the turbine radios and V is the wind velocity.
According to [8], the power coefficient Cp is given by:
Where
The mechanical model between the turbine and shaft generator is defined by [1,2,3,4,5,6,7,8]:
Where Tg, Tem and Tmec are respectively the torque of the fast shaft, the electromagnetic torque and the mechanical torque of generator, J is total moment of inertia and fv is the viscous friction coefficient.
To extract the maximum power generated, we must fix the speed ratio to its optimal value λopt and the power coefficient to its maximum value Cpmax [14]. The wind speed and the electromagnetic torque reference are determined by the following equations [1, 3, 7].
The next figure represents the block diagram model of the turbine with MPPT (Fig. 2):

Block diagram model of the turbine without wind velocity measurement
2.2 Modeling of the DFIG
In this paper, we use a vector control of DFIG based on the stator field oriented control (SFOC). We have adopted a stator flux aligned on the d-axis [1,2,3,4,5,6,7,8, 13]. Therefore:
The d-axis is aligned with the supply voltage Vs, thus \( V_{sd } = V_{s } = \omega_{s} \phi_{sd} \) and Vsq = 0. In addition, the stator resistance Rs can be neglected since this is a realistic assumption for the high power generators [1,2,3,4,5].
The expressions of the active and reactive power are given by:
For power control of DFIG, the expressions of the rotor voltages are established according to the rotor currents (Eq. 8).
Where: \( \upsigma = 1 - \frac{{{\text{M}}^{2} }}{{{\rm{L}}_{\rm{s}} {\text{L}}_{\rm{r}} }} \)
Therefore, the simplified model of DFIG is given in Fig. 3.

Simplified theoretical model of DFIG
3 Synthesis of the ADRC Control and Its Application to DFIG
3.1 Synthesis of ADRC Controller
The Extended State Observer (ESO) is the key of the ADRC, which allows to estimate all real disturbances and modeling uncertainties, this estimate is used in the generation of the control signal in order to decouple the system of the disturbance acting on the actual process [2, 9, 10].
Consider a first order system time-varying dynamic system with single input denoted u, and single-output denoted y (Eq. 9).
Where f(y, d, t) represents the combined effect of internal and external disturbance, b0 is a parameter gain and d represents the external disturbance.
The following mathematical system (Eq. 10) describes the state space of the process as [2, 9, 12]:
The system of equations (Eq. 11) presents the state-space representation of the ESO [2, 9, 10].
Where [β1, β2] is the vector of the observer gain values are given as [12]:
SESO is the pole of the observer is defined by the technique of placement of the poles.
The control input is given by (Eq. 13) [12]:
According to [12], the plant has approximately integrating behavior, which can easily be controlled, by a simple proportional controller (Eq. 14) with gain values Kp [2, 12]. The input signal reference denoted r.
Where, Kp = SCL. Where, SCL denotes the desired closed loop pole. Usually the controller regulation is done by observing the desired closed loop pole. Generally, SESO = 3~10 SCL and consequently, SCL is the only setting parameter [12].
The Fig. 4 shows the structure of the linear ADRC controller for a first order system [2, 9, 12].

Control structure of ADRC
3.2 Applying the ADRC for Control of the Active and Reactive Power of the DFIG
The direct and quadratic rotor current is controlled by the ADRCcontroller, by imposing reference voltages direct and quadratic of the rotor to the rotor side converter (RSC) which generates the control signals using the Pulse Width Modulation (PWM) (Fig. 5) [2].

Scheme of power control of DFIG using ADRC controller
The rotor currents are rearranged to be in the following form:
We can write these expressions in the following form:
Where:
4 Simulation with MATLAB/Simulink and Results
In [2] the performance test of the ADRC was realized at fixed speed, although our work comprised of the wind turbine dynamic modeling and power extraction technique (MPPT).
The wind speed is modeled in the determinist form by a sum of several harmonics, according to [4], its expression is given by the following equation:
Where V0 is the average wind speed and ω = 2π/10
Figure 6 shows the simulated wind profile with an average speed of 4.5 m/s, this figure shows that the turbine has a good adaptation to the variation of the wind thanks to the MPPT control.

Wind Speed and Mechanical Rotor Speed
The reference reactive power is chosen as follow (Fig. 7):

Active and reactive powers of stator and their references.
-
From t = 0 to t = 1 s and from t = 1.5 to t = 2 s: Qs-ref = 0 VAR
-
From t = 1 to t = 1.5 s: Qs-ref = -5e5VAR
4.1 Test of Reference Tracking
Figure 7 shows that the active and reactive powers track with high and very good performances as their references.
4.2 Test of Robustness
This test is to show the robustness of the ADRC controller by varying the internal DFIG parameters by increasing the resistance Rr by 100% and the inductance Lr and Ls by 20% and decreasing M by 10%.
The Fig. 8 shows that the increases in the resistance and inductance of rotor of DFIG have not almost any influence on the operation of the generator because the ADRC controller allows automatically compensate for the disturbance due to these variations and the stability has not affected. Moreover, the outputs of our system track their reference with high performances.

Active and reactive power of stator with varying the internal DFIG parameters
5 Conclusion
In this work, we presented the modeling of the wind turbine based on the DFIG, developing ADRC controller and using the MPPT technic to extract the maximum power generated in order to optimize the capture wind energy by tracking the optimal speed. In addition, we have carried out a simulation in MATLAB/Simulink.
Finally, we can conclude through the results of simulation that the ADRC controller is very efficient in terms of tracking performances and more robust to internal parameters changes because this control strategy deletes in real time the effect of all disturbances which can affect our system.
Abbreviations
- DFIG :
-
Doubly-fed induction generator
- ADRC :
-
Active Disturbance Rejection Control
- ESO :
-
Extended State Observer
- MPPT :
-
Maximum power point tracking
- S, (r) :
-
Stator (rotor) index
- ϕ d, ϕ q :
-
Direct and quadratic flux (Wb)
- R s, R r :
-
Stator and rotor Resistance (Ω)
- L (M) :
-
Inductance (Mutual inductance) (H)
- V :
-
Wind speed (m/sec)
- R :
-
Rotor radius (m)
- β :
-
Pitch angle
- I d, I q :
-
Direct and quadratic rotor currents (A)
- P (Q) :
-
Active (Reactive) power (W) (VAR)
- ω r (ω s ) :
-
Rotor electrical speed (Synchronous electrical speed) (rad/sec)
References
Beltran B, Ahmed-Ali T, Benbouzid ME (2008) Sliding mode power control of variable speed wind energy conversion systems. IEEE Trans Energy Convers 23:551–558
Boualouch A, Nasser T, Essadki A, Boukhriss A, Frigui A (2017) A robust power control of a DFIG used in wind turbine conversion system. Int Energy J 17:1–10
Benbouzid M (2014) High-order sliding mode control of DFIG-based wind turbines. In: Luo N, Vidal Y, Acho L (eds) Wind turbine control and monitoring. Springer, Cham
Nadour M, Essadki A, Nasser T (2017) Comparative analysis between PI & backstepping control strategies of DFIG driven by wind turbine. Int J Renew Energy Res 7(3):1307–1316
Tamaarat A, Benakcha A (2014) Performance of PI controller for control of active and reactive power in DFIG operating in a grid-connected variable speed wind energy conversion system. Front Energy 8:371–378
Srikanth KS, Naga SaiBabu G, Marritboyina V (2017) Controlling of DFIG based wind turbine. Int J Pure Appl Math. 114:293–301
El Aimani S (2011) Modeling and control structures for variable speed wind turbine. In: IEEE international conference on multimedia computing and systems (ICMCS), Ouarzazate, Morocco, pp 1–5
Han J (2009) From PID to active disturbance rejection control. IEEE Trans Ind Electron 56:900–906 IEEE J Mag
Hamane B, Doumbia ML, Bouhamida AM, Benghanem M (2014) Direct active and reactive power control of DFIG based WECS using PI and sliding mode controllers. In: 40th annual conference of the IEEE industrial electronics society (IECON), Dallas, TX, USA, pp 2050–2055
Wang S, Tan W, Li D (2016) Design of linear ADRC for load frequency control of power systems with wind turbine. In: 14th IEEE international conference on control, automation, robotics and vision (ICARCV), USA, pp 1–5
Yang L, Yang GY, Xu Z, Dong ZY, Wong KP, Ma X (2010) Optimal controller design of a doubly-fed induction generator wind turbine system for small signal stability enhancement. IET Gener Transm Distrib 4(5):579–597
Herbst G (2013) A simulative study on active disturbance rejection control (ADRC) as a control tool for practitioners. Electronics 2:246–279
Hachicha F, Krichen L (2011) Performance analysis of a wind energy conversion system based on a doubly-fed induction generator. In: 8th IEEE international multi-conference on systems, signals & devices, Sousse, Tunisia, pp 1–6
Koutroulis E, Kalaitzakis K (2006) Design of a maximum power tracking system for wind-energy-conversion applications. IEEE Trans Ind Electron 53(2):486–494
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chakib, M., Essadki, A., Nasser, T. (2019). Robust ADRC Control of a Doubly Fed Induction Generator Based Wind Energy Conversion System. In: Hajji, B., Tina, G.M., Ghoumid, K., Rabhi, A., Mellit, A. (eds) Proceedings of the 1st International Conference on Electronic Engineering and Renewable Energy. ICEERE 2018. Lecture Notes in Electrical Engineering, vol 519. Springer, Singapore. https://doi.org/10.1007/978-981-13-1405-6_44
Download citation
DOI: https://doi.org/10.1007/978-981-13-1405-6_44
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-1404-9
Online ISBN: 978-981-13-1405-6
eBook Packages: EngineeringEngineering (R0)