
Abstract
Hazard conditions related to cars in urban areas circulation are important in flood riskmanagement. The definition of stability conditions for vehicles when they are in rban areas during flood events is extremely relevant in the hazard and risk studies related to floods. When we test the stability of a car, the vehicle can be buoyant and may be swept away creating potential injuries and even casualties. In this document a description and presentation of results of an experimental campaign developed at the UPC laboratory in Barcelona is presented. For all the cars tested it is possible to define their specific stability limits that can be used by municipalities in their hazard and risk studies. Moreover, same process has been repeated but in a numerical way, with a 3D commercial code (Flow3D). The results obtained showed the possibilities of 3D numerical model to complement physical tests as a virtual lab, with the only drawback of the high computational time, several days to reproduce few seconds of real time.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In the last decade, Europe has suffered many flood events that has produced tremendous damage in different countries. Elba floods in Germany in 2002, floods in the Cote d’Azur, Nice, Cannes, etc. in October 2015 are just two examples of different flood events, river floods and flash floods in urban areas. Flood is the natural hazard producing more deaths and damage costs all over the world. More than 700 people died in Europe in the last 20 years [5].
EU issued the flood Directive 2007/60/EC but it was more oriented to fluvial floods, not to urban pluvial floods. And in all cases, flood studies are more oriented in last years to assess the damages associated to flood events, more than just to check the design capacity of urban sewer systems. Main objective of these hazard/risk analysis is damage over buildings and houses, damage over pedestrians and finally damage to vehicles in urban areas. While the studies on damage on buildings and hazard criteria about pedestrian in urban areas have been promoted by many authors, it is not the same about vehicles [1, 5, 8]. The number of vehicles in cities seems to be increasing year by year. And problems associated to traffic disruption are one of the most significant indirect impacts of flooding in urban activities [3]. So it seems relevant to analyze the hazard problems related to vehicles exposed to flooding in urban areas.
Vehicles can face two problems: they can float, in case water level rises to some critical value, but even with lower water levels, if velocity is high enough, combination of water level and velocity can produce the instability of the car and it can be swept away.
The hazard study for vehicles exposed to water flows has to be based on the determination of their stability threshold. The hazard must be understood as a part of the risk, together with the vulnerability, which may be assessed from water depth and velocity [9, 10]. But not so much information can be found in the literature about stability criteria of vehicles [6, 7, 11] (Fig. 1).

Vehicles during urban floods
The main and more general criterion concerning car stability is the proposed by the Australian Rainfall and Runoff (AR&R) guideline. To update the AR&R 1987 edition, the guideline was revised. Revision consisted of 21 different projects proposed to fill some knowledge gaps observed from the 1987 edition. The so called revision project 10: Appropriate Safety Criteria for Vehicles [11] is the one presenting a quite general comparison between the previous guidelines and recommendations for vehicle stability and all the experimental and theoretical studies developed up to now. Eight Australian guidelines or recommendations were considered in this review, covering Department of Public Works (1986), the Institution of Engineers Australia (1987), Emergency Management Australia and Queensland Government (2002) and the Department of Infrastructure Planning and Natural Resources (New South Wales Government) (2005) among others (Fig. 2).

Summary of existing limiting criteria proposed in technical literature
In this paper, we present a general description of the experimental campaign developed to establish the security conditions for vehicles exposed to urban floods, considering the wheel-ground friction coefficient [2], buoyancy effects and the final results regarding the experimental tests of stability carried out for 14 vehicles. A new methodology to define the stability threshold for any real vehicle exposed to flooding is proposed and compared with other author’s results.
2 Car Stability
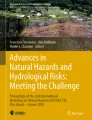
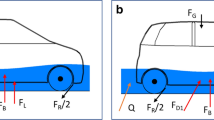
When a vehicle is exposed to flooding, forces due to flow and reaction forces due to the contact with the ground appear. We can distinguish the drag force (F D) and the buoyancy force (F b), and the ground reaction forces (F N) as well as the friction force (F R) (Fig. 1).
Sliding will occur if water drag force (F D) is higher than friction force (F R) produced between wheel tire and ground. Buoyancy instability (i.e. zero or very low flow velocity) will be produced if the vertical force (F v) applied by the water is due to buoyancy force (F b) (1) and equal to vehicle weight (Fg):
where γ w is the specific weight of the water, and V w is the total water volume displaced by the vehicle. Vertical forces can show aside buoyancy effects, lift forces when flow interacts with the lower part of the vehicle.
The force due to flow effects is the drag force (FD) and it may be expressed as:
where ρ w is the density of the water; v is the water velocity along the street; C d is the drag coefficient, which depends on the Reynolds number value and the shape of vehicle; and A is the submerged area of the projection of submerged part of vehicle in a plane perpendicular to flow direction.
3 Experimental Campaign
3.1 Experimental Set-up
An experimental campaign was designed to tests a set of vehicles in flood conditions. Tests were carried out at the existing flume of 20 m long, 0.6 m width, in the Technical University of Catalonia in Barcelona (Spain). Pumping system is composed by two pumps of 60 and 90 l/s. Water is send to and upstream constant level tank and water is sent to the flume through two motorized valves. Flow is measured with a V-notch weir. Discharge is calculated using Kindsvater-Shen expression:
where Q is the discharge and h is the hydraulic head over the weir crest. A local steel model was made according to the design shown in Fig. 3. It was located placed in the upstream zone of the flume, assumed completely horizontal, for the following reasons:

Forces over a vehicle during a flood event
-
(1)
To enable efficient setting up of different slopes (instead of modifying the slope of the entire flume)
-
(2)
To reach steady flow conditions faster during the tests since the flow entrance is close to this zone
-
(3)
To obtain different combinations of water levels and velocities with the same discharge, just modifying the slope of the metal plate. In addition, it is easier to test the vehicles in the flat zone
-
(4)
To carry out tests in supercritical and subcritical flow conditions, so studying a broad set of domain of points according to the results of previous studies
-
(5)
The basis of this local set-up is raised 15 cm above the flume. In this sense, there is no influence of downstream water levels.
Previous hydraulic studies help us to define the set of flow conditions to be tested. They included sub and supercritical conditions. Once the model was constructed a calibration and validation process was carried out to define the Manning roughness coefficient. A value of 0.010 m−1/3 s was adopted, and the adequate length of the slope model was ensured in order to reach normal depth condition (Fig. 4).

Scheme of the test area
14 different vehicles were tested, 10 were 1:14 scale, 3 at scale 1:18 and one at the scale 1:24. One model, Mini Cooper, was tested at the three different scales to verify if scale effects were observed during tests, that was not the case [4]. Cars tested can be seen in the Fig. 5. In some cases, to verify the Froude similitude, some metal pieces were added to achieve the exact weight of the scaled car. Moreover, to avoid the entrance of water in the car during tests, cars were waterproofed with polyurethane foam. The weight of cars was taken before and after the tests to be sure no changes during the process. Car selection was made according to the models found in the market. Detailed models for car collectors were not possible to be considered due to its excess of weight. Most of them are done in a material called Diecast, metal alloy, too heavy to be used, So plastic models were the most suitable to be considered for the tests because it was easier to achieve the exact weight. The cars tested can be seen in Fig. 5.

Cars tested during the experimental campaign
Friction coefficient between rubber and metal plate was obtained from tests and values between 0.52 and 0.62 were found.
Paired values of water level, y, and velocity, v, were tested for all cars. In some cases the car was stable and in others, vehicle was swept downstream. For every case we can represent the points associated to instabilities, as we can observe in Fig. 6.

Limit points for the Audi Q7 model
As we can see, we observe two different lines. For velocities lower than 1.5 m/s, the stability of the car is associated to the buoyancy problems, in this case 52 cm. But even with lower water levels, the car can become unstable and the points defining this condition are located in an hyperbola (vy) = a. For the Audi Q7, a = 0.89. Every car showed its specific curve
This information can be useful for carmakers, or city councils to define which streets can be affected during rain events and to limit some types of vehicles to drive through those streets. If the driver is aware of the limits of his own car, and he gets information about the rainfall forecasts and the potential water level and velocities in the urban district, he can decide not to take the car o drive through another way with lower hazard conditions.
4 Extension to Other Non Tested Vehicles
If we overlap all the stability curves for the different cars tested, we can see that the higher the stability curve is, the higher the value of the parameter “a”. We try to establish some relationship between cars and parameter “a”. In order to do this, we propose to define a Stability Coefficient, SC, as
where the GC is the ground clearance, distance between pavement to lower part of the car, Mc weight of the car, P A the plain area of the car and μ the friction coefficient between tires and pavements.
So for every car we have an SC and a parameter “a”. We propose to establish a relationship between both, and a linear function is proposed:
Correlation coefficient found was 0.93. In the same way it is possible to define the buoyancy limits from the characteristic of the vehicle. So we can get a zone of stability in the velocity/water level domain. Accuracy of the process depends on the friction factor considered. We can apply the proposed methodology to a non-tested car. We selected the Seat Ibiza, one of the most usual vehicles in Spain and in many other european countries.
Because in the definition it is included the friction factor between wheels and pavement, we are never sure which the right value of μ is. So, we can consider a maximum and a minimum value so we can define a stability zone below the curve considering the minimum friction factor, and an unstable zone above the curve with the highest value of the friction factor. Values reported for friction factor can range from 0.25 to 0.75. In this case, for the Ibiza car we find SC values of 4.81 and 14.43. With this, we can get “a” parameters 0.4 and 0.55, as we can see in the fig. 7

Parameter “a” for the Ibiza model
So with these values we can define the stability zones for the vehicle studies. There is an uncertainty zone, between the two curves, depending on the friction factor considered. This case requires the judgment of the final user, considering the state of the pavement on his city, o for every street to be considered (Fig. 8).

Stability zones for a non-tested car: Seat Ibiza model
5 Numerical Approach: 3D Numerical Analysis
The approach presented can be repeated for any car model and in case we do not have a scale model of the car, we can find a file describing the shape of the car, and print in a 3D printer a model of the car to be tested. Or we can use the proposed methodology for non-tested cars so at least we can approach the stability zones. But we wonder if we can approach the stability limits of the car by means of a numerical model. In this case we decided to use a 3D commercial code, called Flow3D. We used one of cars tested, Mercedes Class A, so we can compare numerical results with physical model results.
Flow3D considers the 3D RANS equations, considers a Finite Volume method to solve the mass and momentum conservation equations and the VOF method to define the free surface. Turbulence models are available and the used can select a K-ε, K-ω or a LES model. We selected a K-ε model and the absolute roughness was validated compared with the physical model results.
Computer time was extremely long. To reproduce 3 to 5 s, an average desktop computer, with 8 Mb RAM lasted around 5 days. But we can say that aside some troubles with the assessment of the drag and friction forces at the beginning, results were quite good and same as observed in the physical model. We compared the observed tests registered in video and the numerical evolution of the water levels and they were quite similar as we see in Fig. 9.

Numerical and physical tests of the Mercedes class A
Computer tests allow simulating flow conditions that were not tested in the laboratory due to limitations of flow or velocity. In the next figure we can show some simulations for paired data water level/velocity beyond the limits of the tested conditions in the lab (Fig. 10).

Computer results of points 1–6, 3 stable (4-5-6) and 3 unstable (1-2-3)
6 Conclusions
An experimental campaign has been developed to define the stability limits of cars in flood conditions in urban areas. Every car shows a specific limit curve to separate the safe and unsafe conditions. Tests were done considering Froude similitude and no scale effects were observed, after testing same model with three different scales.
Every car has two instability conditions: first due to buoyancy and second a combination of velocity and water level. It is not necessary to develop extremely high velocity values. 2 or 3 m/s can be enough with few centimeters water to drag the vehicle. Methodology has been extended to non-tested cars. A Stability Coefficient, SC, is proposed to be used and in this way we can propose the limiting conditions for any car.
Results were confirmed using a 3D commercial code. The results are very similar as those found in the physical tests. The only drawback is the very high computer time but we think this can be reduced in a short future.
References
Abt, S. R., Wittler, R. J., Taylor, A., & Love, D. J. (1989). Human stability in a high flood hazard zone. AWRA Water Resources Bulletin, 25(4), 881–890.
Gerard, M. (2006). Tire-road friction estimation using slip-based observers. Master Thesis. Department of Automatic Control. Lund University, Sweden.
Hammond, M. J., Chen, A. S., Djordjević, S., Butler, D., & Mark, O. (2015). Urban flood impact assessment: A state-of-the-art review. Urban Water Journal, 12(1), 14–29.
Heller, V. (2011). Scale effects in physical hydraulic engineering models. Journal of Hydraulic Research, 49(3), 293–306.
Lee, K., 2010. Flood Risk Management. Seminar IIHR. December 2010.
Martínez-Gomariz, E., Gómez, M., & Russo, B. (2016). Estabilidad de personas en flujos de agua (Stability of people exposed to water flows) in Spanish. Ingeniería del Agua., 20(1), 43–58.
Martínez-Gomariz, E., Gómez, M., Russo, B., & Djordjević, S. (2016b). Stability criteria for flooded vehicles: a state-of-the-art review. Journal of Flood Risk Management 10 pp. (record online).
Oshikawa, H., Oshima, T., & Komatsu, T. (2011). Study on the Risk for Vehicular Traffic in a Flood Situation (in Japanese). Advances in River Engineering. JSCE, 17, 461–466.
Russo, B., Gómez, M., & Macchione, F. (2013). Pedestrian hazard criteria for flooded urban areas. Natural Hazards, 69(1), 251–265.
Sanyal, J., & Lu, X. X. (2006). GIS-based flood hazard mapping at different administrative scales: A case study in Gangetic West Bengal, India. Singapore Journal of Tropical Geography, 27(2), 207–220.
Shand, T. D., Cox, R. J., Blacka, M. J., & Smith, G.P. (2011). Australian Rainfall and Runoff (AR&R). Revision Project 10: Appropriate Safety Criteria for Vehicles (Report Number: P10/S2/020).
Acknowledgements
The authors wish to thank the Spanish Ministry of Economy and Competitiveness for the personal financial collaboration in relation to the Scholarship with reference: BES-2012-051781. This work is framed on the research project Criterios de riesgo a aplicar en el diseño de sistemas de captación ante inundaciones en medio urbano. This research project is funded by the Spanish Ministry of Economy and Competitiveness with code CGL2011-26958.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Gómez, M., Martínez, E., Russo, B. (2018). Experimental and Numerical Study of Stability of Vehicles Exposed to Flooding. In: Gourbesville, P., Cunge, J., Caignaert, G. (eds) Advances in Hydroinformatics . Springer Water. Springer, Singapore. https://doi.org/10.1007/978-981-10-7218-5_42
Download citation
DOI: https://doi.org/10.1007/978-981-10-7218-5_42
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7217-8
Online ISBN: 978-981-10-7218-5
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)