
Abstract
We consider systems subject to shocks that follow the generalized Polya process (GPP), which has been recently introduced and characterized in the literature. Distinct from the nonhomogeneous Poisson process that has been widely used in applications, the important feature of this process is the dependence of its future behaviour on the number of previous events (shocks). We consider the delayed events model and the corresponding shot noise process governed by the GPP. We also present some results on the preventive maintenance for systems with failure/repair times following the GPP.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others
Keywords
1 Introduction
The goal of this paper is to present a new useful tool for reliability analyses of technical systems. The most popular point processes that are used in reliability analysis are the Poisson process (homogeneous and non-homogeneous) and the renewal process. In reliability, renewal processes are mostly applied in repair and maintenance modelling, whereas Poisson processes are effective when, e.g., modelling an effect of environment in the form of shocks and in other applications. It is well known that the Poisson process possesses the property of independent increments, which leads to the corresponding Markov property. Thus the past, or the history that describes operation of technical systems cannot influence the future reliability characteristics, which is not the case in numerous reliability application. The history of the renewal process (time since the last renewal) is useful in models of repair and maintenance, however, considering even this simplest history can create certain difficulties in the corresponding mathematical description.
The generalized Polya process that was recently introduced and fully characterized in [6], on one hand allows for the ‘richer’ history and on the other hand, presents tractable solutions for probabilities of interest that can be applied in practice. We will present a short overview of some of the developed results on the GPP modelling in reliability and discuss some of the recent findings in this direction. Hopefully, it will bring this new modelling tool into attention of the wider audience of specialists in stochastic modeling.
In various engineering applications, by a shock we usually mean a ‘point’ potentially harmful event (see, e.g., [14] and references therein). Each shock from a stochastic process of shocks can be fatal (failure) or just result in the decrease in operational characteristics of a system. As the third option it can be also harmless thus showing a resistance of an object to this event. An example of a shock process can be voltage peaks over a threshold in an electrical system, earthquakes effecting the infra-structure of a large territory, insurance claims, etc.
Various shock models have been intensively studied in the literature (see, e.g., [7, 12, 14, 20, 22, 23] and references therein). In reliability studies, the most popular model is, probably, the so-called, extreme shock model, where each shock can result in a system failure with the specified probability and a system survives it with the complementary probability. It should be noted that survival probabilities of systems subject to shock processes for extreme shock model can be obtained explicitly only for the Poisson process of shocks (see, e.g., [9]). Even for the renewal processes of shocks, everything becomes more cumbersome and asymptotic or approximate methods should be used for the corresponding calculations.
Assume for simplicity that shocks constitute the only cause of failure of a system. In applications, we are usually interested in the probability of survival in [0, t). Denote this probability by P(t). The simplest model is when an item is subject to the homogeneous Poisson process (HPP) of shocks with the constant rate r; it survives each shock with probability q and it fails with the complementary probability p = 1 − q (extreme shock model). It is well known that the probability of survival in [0, t) in this case (an item has survived all shocks) is
whereas for the nonhomogeneous Poisson process (NHPP) with rate r(t) and time-dependent p(t), q(t), this expression turns to [4, 13].
Obviously, when r(t) = r and p(t) = p, (4.2) reduces to (4.1). The GPP process, as will be shown in the next sections, presents a useful and practically important generalization to (4.2) and to other characteristics that describe performance of technical systems subject to shocks.
As was mentioned, we assume for simplicity that shocks constitute the only failure mode for the affected systems. All results can be trivially generalized to the case when there are other independent failure modes. However, the dependence between the process of shocks and other failure mechanisms can create numerous interesting problems to be addressed in the future research.
2 Definition of the GPP
A new counting process, called the ‘Generalized Polya Process’ (GPP) has been recently described and studied in detail in [6]. Its definition to follow is based on the notion of stochastic intensity, therefore, let us first briefly discuss this notion in a way suitable for further presentation.
Let {N(t), t ≥ 0} be a point process, where N(t) denotes the number of events (points) in [0, t]. Let H t− ≡ {N(u), 0 ≤ u < t}be the history of this process in [0, t), i.e., the set of all point events in [0, t). The history H t−can be defined by the number of events in [0, t) denoted byN(t−) and the sequential arrival times of events T 0 ≡ 0 ≤ T 1 ≤ T 2 ≤ … ≤ T N(t−) < t. It is well known that the rate of the orderly point process is defined by the following expectation
where N(t 1, t 2), t 1 < t 2, represents the number of events in [t 1, t 2). However, the rate does not fully characterize the point processes and the appropriate characterization should be employed. Point processes can be conveniently and mathematically described by using the concept of stochastic intensity λ t , t ≥ 0 [2]. This stochastic process is often also called the intensity process. For a process {N(t), t ≥ 0}, the stochastic intensity is defined as the following limit (see, e.g., [14]):
Obviously, for the NHPP with rate r(t), the stochastic intensity is deterministic and equal to r(t). Specifically, for HPP λ t = r, t ≥ 0. Note that the stochastic intensity for the renewal process is
where λ F (t) is the failure rate of the governing distribution for the renewal process and T N(t) is the notation for the time of the last before t renewal.
The formal definition of the GPP, via its stochastic intensity is given in [6] as
Definition 1 (Generalized Polya Process (GPP))
A counting process {N(t), t ≥ 0} is called the Generalized Polya Process (GPP) with the set of parameters (λ(t), α), α ≥ 0, β > 0, if
-
(i)
N(0) = 0;
-
(ii)
λ t = (αN(t−) + β)λ(t).
Thus, when α = 0 the GPP reduces to the NHPP with rate r(t) = βλ(t) and, accordingly, the GPP can be understood as a generalized version of the NHPP. A similar model has been recently studied in [1] (see also [3, 17]). However, the focus of these papers was different, mostly considering the corresponding issues of statistical inference and related frailty modeling, whereas here we will mostly concentrate on different results with respect to shock modeling and related aspects. It follows from the definition that the increments of this process are dependent, as probability of an event occurrence in the next infinitesimal interval of time depends on the number of the previous events.
The NHPP, due to its simplicity and possibility to derive the probabilities of interest in the explicit form, is the most popular and convenient point process in reliability applications, specifically, in shocks modeling. However, it possesses the property of independent increments (and therefore, it is a Markov process), whereas in real life the probabilities of events to follow most often depend on history. The GPP as the simplest point process with history, can effectively deal with this problem, which makes it the useful tool in many practical reliability applications. Most of the applications to be considered in this paper will be related to shock modeling, but the following introductory meaningful example deals with the model of imperfect repair.
Example 1
Imperfect repair. Consider the specific GPP process (λ(t) = λ) of imperfect repairs defined by the following stochastic intensity:
The time to the first failure (and instantaneous repair) is described by the Cdf 1 − exp{ −λt}. The first imperfect repair increases the initial failure rate from λ to λ(1 + α) and that is why it is called ‘imperfect’. Therefore, the Cdf of the duration of the second cycle is 1 − exp{ −λ(1 + α)t}. On the third cycle, the failure rate is λ(1 + 2α) and the Cdf is 1 − exp{ −λ(1 + 2α)t}, etc. Thus it increases the failure rate as compared with that on the previous cycle and can be considered as a useful model for imperfect repair. Note that, we define imperfect repair as the repair when each consecutive cycle is stochastically smaller (in a suitable stochastic sense) then the previous one.
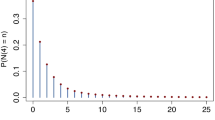
It is shown in [6] and [1] that probabilities of occurrence of n events in [0, t) for the GPP can be described by the corresponding negative binomial distribution:
where \(\Lambda (t) \equiv \int \limits _{0}^{t}\lambda (u)du.\)
See also [6] for relationships for other probabilities of interest (e.g., P(N(t, t + h) = n). It immediately follows from (4.5) that
Therefore, the rate of the GPP can be obtained as the corresponding derivative
Thus, for example, for the constant baseline function, λ(t) = λ, the rate of the process of shocks is exponentially increasing which reflects the cumulative effect of the previous events on the probability of occurrence of an event at the current instant of time.
3 Extreme Shock Model
Let our system be subject to the GPP process of external shocks and assume, for simplicity, that shocks constitute the only cause of its failure. Consider the corresponding extreme shocks model when a system survives each shock with probability q(t) and fails with the complementary probability p(t) = 1 − q(t). Denote by T the time to failure of a system. The extreme shock model with the NHPP of shocks (4.2) was generalized in [10] to the following result (β = 1, for convenience).
The survival function for an object exposed to the GPP of shocks in the described extreme shock model is
whereas the corresponding failure rate is
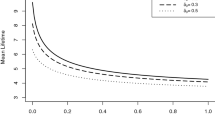
Example 2
Consider the specific case
Then (4.9) becomes:
There are two parameters in this model, i.e., parameter λ describes some general properties. On the other hand, α can be interpreted as an aging parameter (extent of aging), i.e., the increase in α results in a more pronounced influence of the history of the corresponding GPP.
4 Delayed Failures and Shot-Noise Processes
Let, as previously, N(t), t ≥ 0 be an orderly point process (without multiple occurrences) of some ‘initiating’ events (IEs) with arrival times T 1 < T 2 < T 3 < …. Assume now that each event from this process triggers the ‘effective event’ (EE), which occurs after a random time (delay) D i , i = 1, 2, … since the occurrence of the corresponding IE at T i [8]. The sequence of EEs {T i + D i }, i = 1, 2, … form now a new point process. This setting can be encountered in many practical situations, when, e.g., initiating events start the process of developing the non-fatal faults in a system and we are interested in the number of these faults in [0, t). For instance, the initiation of cracks in a material was modelled by the nonhomogeneous Poisson process (NHPP), where D i , i = 1, 2, … were assumed to be i.i.d random variables (see [16] and [5]) for the NHPP case. Alternatively, each EE can result in a fatal, terminating failure and then one can be interested in the survival probability of a system. Therefore, the latter setting means that the first EE results in the failure of our system. Obviously, a failure (the first EE) should not necessarily correspond now to the first IE. This setting in a slightly more generality was considered in [8], however, also only for the case of the NHPP. Note that the IEs can often be interpreted as some external shocks affecting a system, and, for convenience, we will use this term (interchangeably with the “IE”).
It was proved in [16] that when the process of imitating events is the NHPP, the process of effective events is also NHPP. This is a rather unique property. Indeed, denote the rate of the IEs of a general ordinary process by r(t). Then the rate of the point process with delays (EEs) is
where ‘D’ stands for “delay” and g(t) (G(t)) is the pdf (Cdf) of the i.i.d. D i , i = 1, 2, …. For instance, for the HPP with r(t) = λ, the rate of the NHPP of EEs, r D (t) = λG(t) just follows the shape of the distribution of the delay and is increasing asymptotically to λ.
We will focus now on the corresponding survival model and relevant properties of the delayed model when the process of imitating events is GPP. Consider a system subject to the GPP (with the set of parameters (λ(t), α)) of IEs N(t), t ≥ 0, to be called, for convenience, shocks. Let the corresponding arrival times be denoted as T 1 < T 2 < T 3 …. The sequence of EEs {T i + D i }, i = 1, 2, … form now a new point process, {N E (t), t ≥ 0}, where D i , i = 1, 2, . . are i.i.d., non-negative random variables with the pdf (Cdf) g(t) (G(t)). Denote also the time to the first event in this process, which is the survival time if the EEs are fatal, by T S . Thus, in this case, T S is considered as the time to failure of our system. The following result for the distribution of the N E (t) (for each fixed t) and the survival function of the time to the first EE can be obtained in the spirit of [6] generalizing [8]. The latter paper considered the corresponding delay model for the NHPP of shocks, whereas the formulated result is already for the GPP process of shocks.
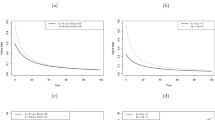
Under the given assumptions, the survival function that corresponds to the time to the first effective event and the corresponding failure rate are given respectively by
These formulas can be effectively used for obtaining reliability characteristics for the described models.
We will discuss now the corresponding shot noise process governed by the GPP. Denote by T the lifetime of a system subject to a shot noise process X(t) and assume, for simplicity, that it is the only cause of the system’s failure. Recall that the ‘standard’ shot noise process X(t) is defined in the literature as (e.g., [19, 21]):
where T j is the j-th arrival time in the point (shock) process {N(t), t ≥ 0}, D j , j = 1, 2, … are the i.i.d. magnitudes of shocks and h(t) is a nonnegative and non-increasing deterministic function for t ≥ 0 and h(t) = 0 for t < 0. Throughout this paper, we assume that {N(t), t ≥ 0} and {D j , j = 1, 2, …} are independent. Obviously, if D j ≡ 1, h(t) ≡ 1, then X(t) = N(t). Note that the simplified version
can be loosely considered as the generalization of the counting process {N(t), t ≥ 0} (although, strictly speaking, X(t) is not a counting process) in the sense that when h(t) is decreasing, it gives different, time-dependent weights to the previous events (counts) in the process, i.e., the larger the time elapsed since the event, the smaller is its input.
Obviously, X(t) does not possess the independent increments property. It should be noted that, in most of the applications of the shot noise processes, it is assumed that the underlying shock process {N(t), t ≥ 0} is Poisson (homogeneous or nonhomogeneous), whereas, in real life, shock processes usually do not possess the independent increments property. For instance, the incidence of the subsequent heart attack depends on how many heart attacks the patient had experienced previously. Similar considerations can be true, e.g., for earthquakes. Therefore, a more adequate model will be the one that takes into account the history of the shock process in the form of the number of the previously occurred events. The GPP perfectly conforms to this intention. Moreover, it can be shown that this process possesses a positive dependent increments property, which means that the susceptibility of the event occurrence in an infinitesimal interval of time increases as the number of events in the previous interval increases. Thus, in what follows we will assume that our system is subject to the GPP of shocks {N(t), t ≥ 0} with the set of parameters (λ(t), α) and will describe some properties of the shot noise process X(t) before addressing the corresponding survival model.
The cumulative impact of external shocks modeled by the shot noise process X(t) can be probabilistically described in different ways. In this paper, we follow the meaningful approach of [18] by assuming that the corresponding failure (hazard) rate process [15] (on condition that {N(t), T 1, T 2, …, T N(t)} and {D 1, D 2, …, D N(t)} are given) is proportional to X(t). This is a reasonable assumption that describes the proportional dependence of the probability of failure of a system in the infinitesimal interval of time on the level of stress, i.e.,
where r t stands for the corresponding failure (hazard) rate process and k > 0 is the constant of proportionality. In general, the survival probability of an item described by the hazard rate process r t is given by the following expectation with respect to this process
The following result generalizing the corresponding NHPP model for the GPP of shocks [10] can be obtained using approached developed in [6].
The system survival function and the failure rate function when {N(t), t ≥ 0} is GPP are given by
and
where \(\Lambda (t) =\int \limits _{ 0}^{t}\lambda (u)du,\quad H(t) =\int \limits _{ 0}^{t}h(u)du\).
5 GPP for the Preventive Maintenance Model
As was mentioned before, the most attractive feature of this process is that it combines probabilistic tractability of the NHPP with a more realistic description of the process of failures (i.e., it takes into account the corresponding history). As another meaningful and practical example, we will show now the usefulness of the GPP for modeling the processes of failures/repairs.
Let each failure of an item which arrives in accordance with the GPP and is GPP-type repaired, meaning that the next cycle of an item’s operation after the repair is in accordance with the next cycle of the GPP process. An item is replaced at t = T and the process restarts. Denote the cost of the GPP repair by C GPP . Thus, the long-run mean cost rate function for this case can be obtained as
where E[N(T)] is given by (4.6) and we can find the optimal T that minimizes this function. The following result was proved in [6]:
Let
Then there exists the unique, finite optimal T that minimizes C(T) in (4.17).
It is important to note that for the existence of the optimal PM time for the NHPP case the failure rate should be an increasing function, however, in (4.18) it can even decrease. Let us consider the ‘marginal case’ when λ(x) = 1∕t (the integral of this function in [0, ∞) is still infinity, i.e., it cannot decrease as a power function faster than 1∕t in order the corresponding distribution to be proper). Then (4.18) is satisfied for c −1 = α > 1. Thus, GPP brings additional deterioration, which is creating the possibility for PM.
Let now each failure be classified as a minor failure with probability q(t) (and then GPP-repaired) or as a major failure with probability p(t) = 1 − q(t) (and then an item is replaced). The cost structure is as follows: the cost of the PM and the failure are C r (repair) and C f (failure), respectively, whereas the cost of the GPP repair is C GPP and C f > C r > C GPP . The PM is scheduled at t = T and the length of a cycle is defined either by T, or the time of a major failure, whichever comes first. The distribution of time to a major failure/replacement (in the absence of the truncating T) in this case is given by (4.8), whereas the corresponding failure rate function is given by (4.9).
Note, that the rate of the GPP process of repairs is \(\lambda (t)\exp \{\alpha \Lambda (t)\}\), where \(\Lambda (t) =\int _{ 0}^{t}\lambda (u)du\). However, we need the rate (in fact, the integral of the rate, which is the mean number of events) of the conditional process on condition that the major failure did not occur. For the NHPP, this rate was q(t)λ(t) and E[N(t)] = ∫ 0 t q(x)λ(x)dx. This quantity for the GPP was also obtained in [10] as
For the sake of notation, denote the right hand side of (4.19) by G(t). Thus, similar to the NHPP case, we are able now to define the mean long-run cost rate and obtain the optimal time of replacement as,
where \(\mu _{Tp} =\int _{ 0}^{T}\bar{F}_{p}(x)dx\) and f(t) = F ′(t). To find the optimal value of T that minimizes C p (T), consider C p ′(T) = 0, which can be written after simple algebra as
It is easy to verify via considering the corresponding derivative that the left hand side of (4.21) is increasing when for all T ≥ 0,
It can be easily shown that, e.g., when p(t) ≡ p, (22) holds for our assumptions (we assume that λ(t) is increasing). In order to cross the line y = C r ∕(C c − C r ) and to ensure a single, finite optimal T, the left hand side of (21) (that is equal to 0 at T = 0) should obey the following condition (at T = ∞):
It is clear that when, e.g., lim t → ∞ λ S (t) = ∞, this condition is always met and we have a single finite solution for optimal T.
In the following example, the baseline λ(t) is set to be a constant, however, λ S (t) is increasing, although counter-intuitively not to infinity, which is due to heterogeneity induced by the history of the corresponding GPP [11].
Example 3
Suppose that λ(t) = λ = 1, \(p(t) = 0.1\forall t \geq 0\), α = 1. 2, C f = 12, C r = 4, C GPP = 1. 5. Then the corresponding calculations show that there exists the unique optimal solution T ≈ 1. 63.
6 Concluding Remarks
The most popular and well-studied point processes in reliability are the renewal and Poisson processes. Although asymptotic properties of the renewal process are quite simple and applied in many reliability problems (e.g., in optimal maintenance), the finite time solutions are usually rather cumbersome and involve numerical methods in applications. On the other hand, models involving NHPP of point events can be usually described mathematically in a close, tractable form. However, the main deficiency of a Poisson process is that it assumes the independent increments for the occurrence of the relevant events. Therefore, in this paper, we discuss a meaningful generalization of the NHPP, the generalized Polya process (GPP). This process that was recently introduced in the literature, on one hand, allows for a more ‘rich’ history and on the other hand, presents tractable solutions for probabilities of interest that can be applied in practice.
In this paper, we have briefly reviewed and discussed some of the GPP models in reliability. The focus was on shock modelling, however in Sect. 8.5, the corresponding optimal preventive maintenance problem was also considered. We hope that it will attract some attention of the wider audience of specialists to this process as real applications usually imply the dependence of events of interest on the history. The GPP presents a tractable and mathematically clear tool for that.
References
Asfaw ZG, Linqvist B (2015) Extending minimal repair models for repairable systems: a comparison of dynamic and heterogeneous extensions of a nonhomogeneous Poisson process. Reliab Eng Syst Saf 140:153–158
Aven T, Jensen U (1999) Stochastic models in reliability. Springer, New York
Babykina G, Couallier V (2014) Modelling pipe failures in water distribution systems: accounting for harmful repairs and a time-dependent covariate. Int J Perform Eng 10:31–42
Block HW, Borges WS, Savits TH (1985) Age-dependent minimal repair. J Appl Probab 22:370–385
Caballé NC, Castro IT, Pérez CJ, Lanza-Gutiérrez JM (2015) A condition-based maintenance of a dependent degradation-threshold-shock model in a system with multiple degradation processes. Reliab Eng Syst Saf 134:98–109
Cha JH (2014) Characterization of the generalized Polya process and its applications. Adv Appl Probab 46:1148–1171
Cha JH, Finkelstein M (2009) On a terminating shock process with independent wear increments. J Appl Probab 46:353–362
Cha JH, Finkelstein M (2011) On new classes of extreme shock models and some generalizations. J Appl Probab 48:258–270
Cha JH, Finkelstein M (2015) On some mortality rate processes and mortality deceleration with age. J Math Biol 72:331–342
Cha JH, Finkelstein M (2016) New shock models based on the generalized Polya process. Eur J Oper Res 251:135–141
Cha JH, Finkelstein M (2016) Justifying the Gompertz curve of mortality via the generalized Polya process of shocks. Theor Popul Biol 109:54–62
Cox DR, Isham V (1980) Point processes. University Press, Cambridge
Finkelstein M (2008) Failure rate modelling for reliability and risk. Springer, London
Finkelstein M, Cha JH (2013) Stochastic modelling for reliability. Shocks, burn-in and heterogeneous populations. Springer, London
Kebir Y (1991) On hazard rate processes. Nav Res Logist 38:865–877
Kuniewski SP, van der Weide JA, van Noortwijk JM (2009) Sampling inspection for the evaluation of time-dependent reliability of deteriorating systems under imperfect defect detection. Reliab Eng Syst Saf 94:1480–1490
Le Gat Y (2014) Extending the Yule process to model recurrent pipe failures in water supply networks. Urban Water J 11:617–30
Lemoine AJ, Wenocur ML (1986) A note on shot-noise and reliability modeling. Oper Res 34:320–323
Lund R, McCormic W, Xiao U (2004) Limiting properties of poisson shot noise processes. J Appl Probab 41:911–918
Nakagawa T (2007) Shock and damage models in reliability theory. Springer, London
Rice J (1977) On generalized shot noise. Adv Appl Probab 9:553–565
Ross SM (1996) Stochastic processes. Wiley, New York
Shaked M, Shanthikumar JG (2007) Stochastic orders. Springer, New York
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this chapter
Cite this chapter
Cha, J.H., Finkelstein, M. (2017). On Some Shock Models with Poisson and Generalized Poisson Shock Processes. In: Chen, DG., Lio, Y., Ng, H., Tsai, TR. (eds) Statistical Modeling for Degradation Data. ICSA Book Series in Statistics. Springer, Singapore. https://doi.org/10.1007/978-981-10-5194-4_4
Download citation
DOI: https://doi.org/10.1007/978-981-10-5194-4_4
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-5193-7
Online ISBN: 978-981-10-5194-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)