
Abstract
This paper presents the findings of a simulator study that examined the effects of driver fatigue and road curvature on steering wheel angle. Twenty participants took part in this research, and each participant drove in two sessions, alert driving session and fatigue driving session. Throughout the driving task, the steering wheel angle, roadway scene video, and participants’ face video were recorded. According to Karolinska Sleepiness Scale (KSS) score and road curvature, steering wheel angle data were classified into six categories. Three metrics including mean steering wheel angle, standard deviation of steering angle, and coefficient of variation of steering angle were proposed and evaluated to each category. The results revealed that road curvature was the main factor of the change of steering wheel angle and driver fatigue had significant effects on steering wheel angle only on the straight road.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
Introduction
Driver fatigue (or driver drowsiness or sleepiness) has been proven to be one of the main causes of traffic accidents [1]. Klauer et al. [2] have shown that fatigue driving increases the accident risk by four to six times, compared with alert driving. In fact, it is found that approximately 20% of all fatal road accidents involve driver fatigue, varying from 5 to 25% in different countries [3]. However, Nordbakke and Sagberg [4] revealed that drivers tend to continue driving, even though they are aware of the risk factors that related to fatigue. In light of these disconcerting statistics, countermeasures against fatigue driving have received increased attention during the last couple of decades [5].
A change in the mental state can induce a change in driving performance [6, 7]. Otmani et al. [8] found that driver fatigue has a significant effect on driving performance, especially on lane keeping and steering performance [1, 9]. Zhong et al. [10] found that when drivers had a fatigued status, the steering wheel angle and vehicle tracking became irregular, and the range of deviation greatly increased.
Sayed performed a series of experiments on driver’s steering characteristics. It has shown that steering activity is a good skill for evaluating driver fatigue among other variables [11, 12]. It has been reported that fatigue drivers have a lower frequency of steering reversals [13], a deterioration of steering performance [14], a decrease in the steering wheel reversing rate [15], more frequent steering maneuvers during wakeful periods and no steering correction for a prolonged period of time followed by a jerky motion during drowsy periods [16], low velocity steering [17], large amplitude steering wheel movements, and large standard deviations in the steering wheel angle [18].
The current research focuses on the correlation between steering-related variables and driver fatigue, while the effects of road curvature are not considered. It is known that road geometry influences steering wheel angle seriously. Weller and Schlag [19] found that the road geometry influences the accuracy of distraction detection based on driving data. Mortazavi et al. [9] found that it was hard to obtain any possible direct correlation between steering-related variables and driver fatigue by analyzing the data from all sections simultaneously. It is necessary to investigate the independent and interaction effects of driver fatigue and road curvature on steering wheel angle. The presented experiment was designed to further investigate the correlation between steering related variables, driving fatigue level and road geometry. Experiments were conducted in a driving simulator. According to the road geometry, road type was classified into three categories. The effects of driver fatigue and road types on steering wheel angle were analyzed, respectively.
Method
Subjects
Twenty participants (6 women and 14 men) aged 25–39 years (mean = 29.85, std = 4.61) took part in this study. All participants were experienced drivers with valid licenses and 3- to 18-year driving experience (mean = 8.05, std = 4.03), who drove at least 12,000 km annually. They were free of any sleep disorder and on no medication, and recruited via an advertisement in school website, each participant was paid for ¥200.
Driving Simulator
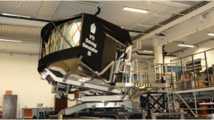
The driving task took place in a driving simulator. Road image was placed 2.50 m away from the driver. The driving scenario was a 133-km-long highway of a sampled actual Changping highway located between Changchun and Siping cities, with two lanes in one direction. The selected traffic situation was only sparse oncoming traffic and no traffic driving in the same direction as the test participant.
Experimental Procedure
Each participant took part in two driving simulation sessions, normal driving session (alert driving session) and sleep-deprived session (fatigue driving session). For each participant, it took two days to accomplish the experiment. The two test days were conducted approximately 2 weeks apart, and each participant was informed two days before performing the experiment. Participants were asked to abstain from alcohol and to restrict tea and caffeine consumption 12 h before the test.
For the alert driving session, before the test day, participants were allowed to carry on with their daily life activity and instructed to have at least eight hours of sleep (11:00 p.m.–7:00 a.m.) in the night. In the test day, participants arrived at the laboratory at 8:30 a.m., and experiment started at 9:00 a.m. Before the experiment, participant’s personal information was checked and the requirements of the study and details of the protocol were informed. The alert driving session lasted 2 h. In the first 30-min driving, participants completed a practice training session to be familiar with the simulator. The familiar driving data were excluded, and data in the last 90-min driving process were recorded as the alert driving data.
For the fatigue driving session, before the test day, participants were allowed to carry on with their daily life activity and instructed to have only five hours of sleep (1:00 a.m.–6:00 a.m.) in the night. In the test day, participants arrived at the laboratory at 1:30 p.m. The fatigue driving experiments were conducted between 2:00 p.m. and 5:00 p.m. or till the driver was too fatigued to continue driving. Most of the drivers stopped before 5:00 p.m. In this session, participants were sleep-deprived and susceptible to falling asleep during driving.
In the two driving sessions, participants were asked to drive at their own pace to observe the usual driving rules without exceeding the highway motorway speed limit (in China 80–120 km/h). Each participant was questioned about his/her level of fatigue according to the Karolinska Sleepiness Scale (KSS) [20] before and after the driving task. These subjective KSS levels were recorded as the baseline for the researcher to assess participants’ fatigue level during the experiment according to the video data.
Recorded Variables
Three types of data were recorded during the experiment: (1) steering performance data including steering wheel angle, which were recorded at 20 Hz. (2) digital video of the roadway scene recorded outside the cabin at 10 Hz. (3) digital video of the driver’s face recorded inside the cabin at 10 Hz. All of these data were recorded synchronously.
Data Classification
Face Video Data Classification
Since the way of a driver’s facial feature changes as they get progressively fatigue, their facial feature at different fatigue level during the drive can give important insight into his current state [21]. The face video data of each participant were reviewed, and their fatigue level was scored on the KSS by three researchers together. Furthermore, participants’ subjective KSS level, which was evaluated by themselves when started and finished the driving experiment, was considered.
Ingre et al. [22] found that the standard deviation of lane position (SDLP) increased gradually from KSS level 1 (SDLP = 0.191, SE = 0.063) to KSS level 3 (SDLP = 0.221, SE = 0.042), while it increased dramatically from KSS level 7 (SDLP = 0.277, SE = 0.042) to KSS level 9 (SDLP = 0.465, SE = 0.040). It indicates that, when KSS level is 3, participant is in alert state and can control vehicle stably, and when KSS level is increased to 7, participant is in fatigue state and the control ability is affected. This conclusion agrees well with previous research on subjective and objective sleepiness [20] and suggests that serious behavioral and physiological changes do not occur until relatively high levels of sleepiness \( ({\text{KSS}} \ge 7) \) are reached. Meanwhile, based on the face video data, it is impossible for researchers to distinguish participant’s fatigue level between a rating of 5 (“neither alert nor sleepy”) and a rating of 6 (‘some signs of sleepiness’), or between a rating of 5 (“neither alert nor sleepy”) and a rating of 4 (‘rather alert’). However, there are significant differences between a rating of 3 (‘alert’) and a rating of 7 (‘sleepy, no effort to stay awake’). In this research, if \( {\text{KSS}} \le 3 \), driver is in alert state, if \( {\text{KSS}} \ge 7 \), driver is in fatigue state, and other KSS levels are not discussed.
The driving session was coded and cataloged according to the KSS level, which could make it easy to locate notable points in the data. All datasets were reviewed and coded by the same researchers. The coded episodes information includes: subject number, KSS level, start time of the driving state, end time of the driving state, and comments.
Road Video Data Classification
The steering wheel angle values along the road were dependent upon road curvature [9]. To compare steering wheel angle data for different driving states under different road curvatures, the driving performance data should be examined under different road geometry, i.e., straight road, curvature road, and connection road (connection between straight road and curvature road). The road video data of each participant were reviewed based on the start time and the end time of the divided face video episode. According to road geometry, road video data were divided into three types of episodes: straight road episode, curvature road episode, and connection road episode.
Steering Wheel Angle Data Classification
According to the road video episodes, steering wheel angle data were classified into six categories: alert driving on straight road (AST), alert driving on curvature road (ACU), alert driving on connection road (ACO), fatigue driving on straight road (FST), fatigue driving on curvature road (FCU), and fatigue driving on connection road (FCO).
Results
According to the classification in Sect. 3.3, 12 sets of steering wheel angle data were selected to analyze the changes of steering wheel angle based on each category and the time interval of each group was 10s. The statistic analysis parameters, which include mean steering wheel angle, standard deviation of steering wheel angle and coefficient of variation of steering wheel angle, are listed in Table 1. ANOVA and paired sample t-tests were used to analyze the effects of driver state and road curvature on steering performance. Tukey’s post hoc test was adopted to compare means for different factors. The significance level was adjusted for the number of comparisons being performed to preserve an alpha level of 0.05.
Mean Steering Wheel Angle
Effects of Road Curvature
The effects of road curvature on mean steering wheel angle were analyzed in different driving states. When driver was in alert state, paired sample t-tests were used to compare means for the three types of road curvature based on the AST, ACO, and ACU data. Significant differences were found between the straight road and both the curvature road (t(11) = 4.698, p = 0.001) and the connection road (t(11) = 8.803, p < 0.001), and there was no significant difference between the curvature road and the connection road (t(11) = −0.962, p = 0.357).
When driver was in fatigue state, the analysis was based on the FST, FCO, and FCU data. Paired sample t-tests revealed that there were significant differences between the straight road and both the curvature road (t(11) = 13.226, p < 0.001) and the connection road (t(11) = 12.095, p < 0.001), and there was also significant differences between the curvature road and the connection road (t(11) = −4.594, p = 0.001).
Thus, mean steering wheel angle was affected by road curvature and there were significance differences between different road curvatures, no matter what driving state was.
Effects of Driver Fatigue
The effects of driving state on mean steering wheel angle were analyzed on different road curvatures. On the straight road, the mean of steering angle was lower when driver was in alert state than in fatigue state (F(1,22) = 9.791, p = 0.005), and there was no significant difference on the curvature road (F(1,22) = 3.388, p = 0.079) and on the connection road (F(1,22) = 0.916, p = 0.349).
In sum, mean steering wheel angle was affected by driving state only on straight road. When driver was fatigue, mean steering wheel angle was higher than alert driving, while there was no significant difference between the curvature and connection road.
Standard Deviation of Steering Angle
Effects of Road Curvature
The effects of road curvature on standard deviation of steering angle were analyzed in different driving states. When driver was alert, paired sample t-tests were used to compare means for the three types of road curvature. Significant differences were found between the connection road and both the curvature road (t(11) = −6.458, p < 0.001) and the straight road (t(11) = −5.637, p < 0.001), and there was no significant difference between the curvature road and the straight road (t(11) = −1.369, p = 0.198).
In fatigue driving state, a significant effect was found for the road curvature (F(2,33) = 9.678, p < 0.001). The Tukey post hoc test found that standard deviation of steering angle on the connection road was significantly different from both the straight road (p = 0.001) and the curvature road (p = 0.008), and there was no significant difference between the straight road and the curvature road (p = 0.576).
The effects on standard deviation of steering angle had significant differences between the connection road and both the curvature road and the straight road, while there was no significant difference between the curvature road and the straight road. It revealed that sharply fluctuated road curvature was the main influencing factor.
Effects of Driver Fatigue
The effects of driving state on standard deviation of steering angle were analyzed on different road curvatures. On the straight road, the standard deviation of steering angle of alert driving was significantly lower than that of fatigue driving (F(1,22) = 6.981, p = 0.015). There was no significant difference between the curvature road (F(1,22) = 2.260, p = 0.147) and the connection road (F(1,22) = 1.410, p = 0.248).
The standard deviation of steering angle was affected by driving state only on straight road when driver was fatigue, which was consistent with the effects of the mean steering wheel angle by driving state.
Coefficient of Variation of Steering Angle
As is discussed in Sects. 4.1 and 4.2, mean steering wheel angle and standard deviation of steering angle are affected by road curvature and driving state. Road curvature is the main factor, which lead to the change of steering wheel angle, changes in different driving state only on the straight road. In order to eliminate the effects of road curvature, coefficient of variation is presented to analyze the effect of driving state on the curvature road and the connection road. Coefficient of variation of steering angle is calculated according to CV_STEER = STD_STEER/MEAN_STEER, where CV_STEER represents coefficient of variation of steering angle, STD_STEER represents standard deviation of steering angle, MEAN_STEER represents mean steering wheel angle and the calculate results are listed in Table 1.
On the curvature road, there was no significant difference between alert driving and fatigue driving (F(1,22) = 1.275, p = 0.271). So was the connection road (F(1,22) = 0.390, p = 0.239).
Discussion
Driver fatigue affects driving performance seriously. The current research focuses on the correlation between steering related variables and driver fatigue, and the influence of road curvature is not considered. Mast et al. found that the lane-tracking ability decreased as the time on the task increased [14]. Variables such as the times of lane departures, SDLP, and maximum lane deviation were found highly correlated with driver fatigue [23]. The mean square of lane deviation, mean square of high-pass lateral position, and SDLP showed good potential as drowsiness indicators [24]. However, Yang et al. [25] demonstrated that sleep deprivation had greater effect on rule-based than on skill-based cognitive functions: When drivers were sleep-deprived, their performance of responding to unexpected disturbances degraded, while they were robust enough to continue the routine driving tasks such as lane tracking, vehicle following, and lane changing [25].
Lane variability is widely considered to be an important metric of fatigue driving [25,26,28], but to date it required installation of lane-tracking cameras and complex video signal processing software. Video-based lane tracking is prone to data loss when lane markers are missing or covered (e.g., by sand or snow), when weather conditions are bad, or in darkness. These limit the application of lateral lane position variability for driver fatigue detection. Forsman et al. [1] found that steering wheel angle can be used effectively to estimate the relative changes in lateral lane position. Then, steering wheel angle was found to be the most sensitive indicators for driving fatigue detection [28,29,31]. In this study, the influence of driver fatigue and road curvature on steering wheel angle was analyzed.
This research developed a method to evaluate driver fatigue level, which is the precondition for extracting precise fatigue driving data. Previous works on fatigue level evaluation were primary based on psychomotor vigilance test (PVT) [32] and the KSS. In the literature of Otmani, subjects were invited to assess their level of alertness on the KSS every 10 min during the driving [8], which was more intrusive, and fatigue level and driving performance was affected by the assessment process. Another potential limitation is individual difference. Furthermore, Reyner and Horne [33] found that drivers sometimes underestimated the likelihood of falling asleep, despite feeling very sleepy. Forsman et al. [1] rated participant fatigue level by a 10-min PVT and KSS before and after the driving session, while, the driving session was only 30 min, it is not suitable for long driving. An objective evaluated method was proposed in our research, and fatigue level was scored based on KSS by three researchers through face video data during driving process of participants. In this method, driving fatigue level can be evaluated in real time without intrusion and individual difference.
Based on the KSS level and road curvature, driving simulator data were classified into six categories. On the same driving state, mean steering wheel angle revealed significant differences between different road curvatures. The analysis of standard deviation of steering angle on the alert driving state showed significant differences between connection road segments and both straight road and curved road segments. However, there was no significant difference between straight road and curved road segments. It suggests that steering wheel angle fluctuates stably in the same road curvature and the change of road geometry is the main cause of sharp fluctuation, which is consistent with Mortazavi [9].
On straight road segments, drivers showed significant differences in steering wheel angle, which include mean steering wheel angle and standard deviation of steering angle, during the fatigue driving state compared to alert driving. However, there were no significant differences between curved road segments and connected road segments. In order to eliminate effects of road curvature, coefficient of variation of steering angle was proposed in our research. The experiment result is consistent with mean steering wheel angle and standard deviation of steering angle. It suggests that, fatigued drivers control ability deteriorates significantly on straight road segment, as they are more cautious and modify the steering wheel frequently on the curved road. Our research suggests that steering wheel variability could not be used directly for driver fatigue detection without considering road curvature.
Driver fatigue is the main factor of road crashes, consequently increasing researches focus on it. However, as applied psychological constructs, there is no generally accepted definition of driver fatigue. In our study, if KSS level is more than 7, driver is considered in fatigued driving state, and, if KSS level is less than 3, driver is considered in alert driving state. We are still not able to give an accurate definition, and the fatigue level is not determined when warn should be triggered as it is too dangerous to continue driving. The steering wheel angle data, which were used in our research, were collected from a driving simulator with realistic hardware. It is critical that a field study of real-world driving be conducted to assess the validity.
References
Forsman, P.M., B.J. Vila, R.A. Short, C.G. Mott, and H.P.A. Van Dongen. 2013. Efficient driver drowsiness detection at moderate levels of drowsiness. Accident Analysis and Prevention 50: 341–350.
Klauer, S.G., Dingus T.A., Neale, V.L., Sudweeks, J.D., and D.J. Ramsey. 2006. The impact of driver inattention on near-crash/crash risk: An analysis using the 100-car naturalistic driving study data. National Highway Traffic Safety Administration.
Coetzer, R.C., and G.P. Hancke. 2009. Driver fatigue detection: A survey. In IEEE AFRICON Conference in AFRICON, 1–6.
Nordbakke, S., and F. Sagberg. 2007. Sleepy at the wheel: Knowledge, symptoms and behaviour among car drivers. Transportation Research Part F 10 (1): 1–10.
Dinges, D.F., Mallis, M.M., Maislin,G., and J.W. Powell. 1998. Final report: Evaluation of techniques for ocular measurement as an index of fatigue and as the basis for alertness. Management. U.S. Department of Transportation, National Highway Traffic Safety Administration, Final Report # DOT HS 808 762, Washington, DC.
Dong, Y., Z. Hu, K. Uchimura, and N. Murayama. 2011. Driver inattention monitoring system for intelligent vehicles: A review. IEEE Transactions on Intelligent Transportation Systems 12 (2): 596–614.
Jin, L.S., Q.N. Niu, H.J. Hou, H.C. Xian, Y.L. Wang, and D.D. Shi. 2012. Driver cognitive distraction detection using driving performance measures. Discrete Dynamics in Nature and Society 2012: 1–12.
Otmani, S., T. Pebayle, J. Roge, and A. Muzet. 2005. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiology & Behavior 84 (5): 715–724.
Mortazavi, A., A. Eskandarian, and R.A. Sayed. 2009. Effect of drowsiness on driving performance variables of commercial vehicle drivers. International Journal of Automotive Technology 10 (3): 391–404.
Zhong, Y.J., Du, L.P., Zhang, K., and X.H. Sun. 2007. Localized energy study for analyzing driver fatigue state based on wavelet analysis. In Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition, Beijing, 1843–1846.
Sayed, R., and A. Eskandarian A. 2001. Unobtrusive drowsiness detection by neural network learning of driver steering. In Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 215(9), 969–975.
Sayed, R., Eskandarian, A., and M. Oskard. 2001. Driver drowsiness detection using artificial neural networks. In Transportation Research Board 80th Annual Meeting, Washington D.C.
Hulbert, S. 1972. Effects of driver fatigue. In Human Factors in Highway Safety Research, ed. T.W. Forbes, 110–132. New York: Wiley.
Mast, T.M., H.V. Jones, and N.W. Heimstra. 1966. Effects of fatigue on performance in a driving device. Highway Research Record 122: 93.
Kahneman, D. 1973. Attention and Effort. New Jersey: Prentice-Hall.
Wierwille, W.W., and L.A. Ellsworth. 1994. Evaluation of driver drowsiness by trained raters. Accident Analysis and Prevention 26 (5): 571–581.
Dingus, T.A., Hardee, L., and W.W. Wierwille. 1985. Development of impaired driver detection measures. USA Departmental Report 8504. Blacksburg: Department of Industrial Engineering and Operations Research, Virginia Polytechnic Institute and State University.
Elling, M., and P. Sherman. 1994. Evaluation of steering wheel measures for drowsy drivers. In Proceedings of the 27th ISATA, Aachen, Germany, 207–214. Germany: Automotive Automation Ltd.
Weller, G., and B. Schlag. 2009. A robust method to detect driver distraction. In Proceedings Conference Human Centred Design for Intelligent Transport Systems, 279–288.
Åkerstedt, T., and M. Gillberg. 1990. Subjective and objective sleepiness in the active individual. International Journal of Neuroscience 52: 29–37.
Nodine, E. 2008. The detection of drowsy drivers through driving performance indicators. Master’s Thesis, Tufts University, United States.
Ingre M, Akerstedt T, Peters B. A. Anund, and G. Kecklund. Subjective sleepiness, simulated driving performance and blink duration: Examining individual differences [J], Journal of Sleep Research, 2006, 15(1): 47-53.
Yeo, M.V.M., X. Li, K. Shen, and E.P.V. Wilder-Smith. 2009. Can SVM be used for automatic EEG detection of drowsiness during car driving? Safety Science 47 (1): 115–124.
Stein, A.C. 1995. Detecting fatigued drivers with vehicle simulators. In Driver impairment, driver fatigue and driving simulation, ed. L. Hartley, 133–148. London: Taylor & Francis.
Yang, J.H., Z.H. Mao, L. Tijerina, T. Pilutti, J.F. Coughlin, and E. Feron. 2009. Detection of driver fatigue caused by sleep deprivation. IEEE Transactions on Systems, Man and Cybernetics-Part A: Systems and Humans 39 (4): 694–705.
Åkerstedt, T., M. Ingre, G. Kecklund, A. Anund, D. Sandberg, M. Wahde, P. Philip, and P. Kronberg. 2010. Reaction of sleepiness indicators to partial sleep deprivation, time of day and time on task in a driving simulator-the DROWSI project. Journal of Sleep Research 19 (2): 298–309.
Anund, A., G. Kecklund, B. Peters, Å. Forsman, A. Lowden, and T. Åkerstedt. 2008. Driver impairment at night and its relation to physiological sleepiness. Scandinavian Journal of Work, Environment & Health 34 (2): 142–150.
Sandberg, D., A. Anund, C. Fors, G. Kecklund, J.G. Karlsson, M. Wahde, and T. Åkerstedt. 2011. The characteristics of sleepiness during real driving at night-a study of driving performance. Physiology and subjective experience. Sleep 34 (10): 1317–1325.
Berglund, J. 2007. In-vehicle prediction of truck driver sleepiness-steering related variables. Master’s Thesis, Linkŏping University, Department of Electrical Engineering, Sweden.
Friedrichs F., and B. Yang. 2010. Drowsiness monitoring by steering and lane data based features under real driving conditions, In 18th European Signal Processing Conference (EUSIPCO-2010), Aalborg, Denmark, 209–213.
Mattsson K. 2007. In-vehicle prediction of truck driver sleepiness. Master’s Thesis, Luleå University of Technology, Sweden.
Dinges, D.F., and J.W. Powell. 1985. Microcomputer analyses of performance on a portable, simple visual RT task during sustained operations. Behavior Research Methods, Instruments & Computers 17: 652–655.
Reyner, L.A., and J.A. Horne. 1998. Falling asleep whilst driving: Are drivers aware of prior sleepiness? International Journal of Legal Medicine 111: 120–123.
Acknowledgements
This research was supported partly by Doctoral Study Special Research Foundation of Higher Education (No. 20110061110036), Major Projects of Jilin Science and Technology Department (No. 20116017), New Century Excellent Talent Foundation Program under Grant (NCET-10-0435).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Science+Business Media Singapore
About this paper
Cite this paper
Niu, Q., Zhou, Z., Yu, P., Liu, S., Wang, Q. (2018). Effects of Driver Fatigue and Road Curvature on Steering Wheel Angle. In: Wang, W., Bengler, K., Jiang, X. (eds) Green Intelligent Transportation Systems. GITSS 2016. Lecture Notes in Electrical Engineering, vol 419. Springer, Singapore. https://doi.org/10.1007/978-981-10-3551-7_24
Download citation
DOI: https://doi.org/10.1007/978-981-10-3551-7_24
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-3550-0
Online ISBN: 978-981-10-3551-7
eBook Packages: EngineeringEngineering (R0)