
Abstract
BeiDou provides triple-frequency signals for all operational satellites. However, an apparent inconsistency between triple-frequency carrier phases has been discovered. The satellite clock products derived from B1/B2 carrier phase observations cannot be used for B1/B3 based precise point positioning (PPP) without careful consideration of the inconsistency. The apparent inconsistency is known as inter-frequency clock bias (IFCB). Datasets collected at 37 globally distributed stations on fourteen consecutive days are employed to analyze the IFCB of BeiDou GEO (Geostationary Orbit), IGSO (Inclined Geosynchronous Orbit) and MEO (Medium Earth Orbit) satellites. A weighted epoch-differenced approach is proposed to estimate the IFCB. The results indicate that the IFCB is time- and satellite-dependent, and is irrelevant to the antenna types, station locations, satellite elevation and azimuth angles. The IFCB of GEO and IGSO satellites has a significant daily period. The IFCB varies within a range of –4 to +4 cm, and the RMS (root mean square) values of IFCB are smaller than 2 cm. There is a high correlation between IFCB of two adjacent days for part of GEO and IGSO satellites, and the RMS values of IFCB differences between two adjacent days for these satellites are usually smaller than 0.5 cm. When the extracted IFCB of the first day is used to correct the B1/B3 ionosphere-free carrier phase observations of the second day, the BeiDou PPP based on B1/B3 achieves higher positioning accuracy and smaller observation residuals.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Currently, the American modernized GPS system, the European Galileo system, the Japanese Quasi-Zenith Satellite System (QZSS) and the Chinese BeiDou system all provide multi-frequency signals. The BeiDou system is a project made by China to develop an independent global navigation satellite system (GNSS), and all operational BeiDou satellites provide triple-frequency signals. The joint use of multi-frequency signals has become the trend of GNSS development. There are many advantages when using multi-frequency signals, such as improving the positioning accuracy and speeding up the ambiguity resolution process [1, 2]. However, there is an apparent inconsistency between triple-frequency carrier phases, which is known as inter-frequency clock bias (IFCB). Due to the influence of the IFCB variations, the satellite clock products derived from L1/L2 (B1/B2) carrier phase observations cannot be used for L1/L5 (B1/B3) based precise point positioning (PPP).
Montenbruck et al. [3] first noticed that periodical changes exist in L1/L5-minus-L1/L2 clock offset estimates, namely IFCB estimates, for the latest generation of GPS satellites, termed Block IIF. The results suggested satellite internal temperature variations due to varying sun illumination as the root cause of the IFCB variations, and the illumination itself depended on the sun–spacecraft–earth angles. With the development of BeiDou system, the IFCB variations between B1/B2 and B1/B3 carrier phases have been observed for GEO (Geostationary Orbit) and IGSO (Inclined Geosynchronous Orbit) satellites [4]. The IFCB is usullay estimated with a strategy in which the handling of ambiguities is needed, and thus the strategy is time consuming and complicated [3]. To reduce the computational burden, Li et al. [5] proposed an epoch-differenced (ED) approach to estimate the IFCB. The proposed approach removes the ambiguity parameters, and only ED IFCB remains. The IFCB of GPS Block IIF satellites and BeiDou GEO satellites was investigated with the ED approach [5–7]. The IFCB of QZSS satellites was also investigated and the results showed that it has no variation characteristics [8]. Most of the research works focused on the investigation of the time varying characteristics and the modeling of IFCB. The IFCB corrections still have not been applied to position determination. Hence many details have not been considered, such as the difference between a solar day and a sidereal day.
In this paper, datasets collected at 37 globally distributed stations on fourteen consecutive days are employed to analyze the characteristics of IFCB for BeiDou GEO, IGSO and MEO (Medium Earth Orbit) satellites. A weighted epoch-differenced approach is proposed for the IFCB estimation. The extracted IFCB of the first day is used to correct the B1/B3 ionosphere-free carrier phase observations of the second day, and then the performance improvement of BeiDou PPP based on B1/B3 is evaluated in terms of positioning accuracy and observation residuals.
2 IFCB Estimation Approach
The carrier phase observations on B1, B2 and B3 frequencies can form different ionosphere-free combinations. The geometric range and tropospheric delay can be removed by an operation of subtraction between two different ionosphere-free combinations, such as B1/B2 and B1/B3, and the remained terms are phase ambiguity and inter-frequency clock biases. The differenced ionosphere-free (DIF) observations can be expressed as [3]:
where const1,2 is the ambiguity of ionosphere-free combination formed with B1 and B2, and const1,3 is the ambiguity of ionosphere-free combination formed with B1 and B3. dT 1,2 and dT 1,3 are the satellite clock offsets derived from B1/B2 and B1/B3 carrier phase observations, respectively, and the difference between them is the IFCB.
Based on Eqs. (1) and (2), the IFCB can be estimated in a general clock estimation procedure [3, 9]. To reduce the computational burden, the ED approach is employed in this study. The ED approach proposed by Li et al. [5] is modified by taking into account the effects of measurement noises with different satellite elevation angles. A weighted epoch-differenced approach (WEDA) is proposed for the IFCB estimation in this contribution.
From Eq. (1), the following equation can be derived:
Assuming that there is no cycle slip between two adjacent epochs, the phase ambiguity items in Eq. (3) can be eliminated by an operation of epoch-difference between the DIF phase measurements of the two epochs. The ED IFCB at epoch m can be expressed as:
where “∆” represents the ED operator, and ∆IFCB is the ED IFCB. If the IFCB is time- and satellite-dependent, ∆IFCB(m) should be the same for different stations. The dependence of IFCB on time and satellite will be testified in the next section. Assuming that there are n stations in the network, which improves the redundancy of the solutions, the ED IFCB at epoch m can be calculated through a weighted average over the entire network:
where E is the satellite elevation angle, and w is the weight of ∆IFCB for each station. Since the measurement noises start to increase significantly when the satellite elevation angles decrease to 40°, the ∆IFCB values with elevation angles below 40° are down-weighted.
It is assumed that the IFCB at the first epoch is zero, and the IFCB at epoch m can be calculated as follows:
According to Eq. (7), the IFCB at all epochs can be obtained. Assuming that there are p epochs in one day and the sum of IFCB at these epochs equals to zero, the final IFCB at epoch m can be described as:
There may be a common constant bias in IFCB with respect to all epochs. The constant bias, however, is not a problem for PPP float solutions as it will be grouped with ambiguity term in parameter estimation process. But the bias will affect the fractional-cycle biases (FCB), which are essential for ambiguity fixing in PPP.
3 Results and Analysis
3.1 Data Description
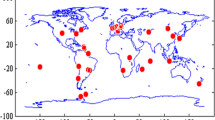
Datasets collected at 37 globally distributed MGEX (Multi-GNSS Experiment) stations on November 1–14, 2015, are employed to analyze the IFCB. The geographical distribution of the stations is shown in Fig. 1. All stations were equipped with “Trimble NetR9” GNSS receivers which can produce BeiDou triple-frequency observations. All observations were recorded at a sampling interval of 30s, and the satellite elevation mask angle was set to 10°.

Geographical distribution of 37 MGEX stations
3.2 IFCB Dependence Analysis
In order to analyze the dependence of IFCB, datasets from five stations on November 1, 2015 are adopted for the data processing. The five stations are located in different areas and set up with different types of antennas. Each station can track 10–13 BeiDou satellites. The detailed information of the five stations is listed in Table 1.
Alternatively, the IFCB can be acquired by subtracting an average DIF over each continuous ambiguity block from raw DIF values [4]. The detection and repair of cycle slips are carried out using triple-frequency measurements [10]. The absolute IFCB cannot be achieved through the above approach, and the tracking time of one satellite is different for different stations. Therefore, the IFCB values of the satellite at common epochs are different for different stations.
The IFCB of each BeiDou satellite at the five stations is obtained using the above approach, and the results are shown in Fig. 2. For the convenience of contrastive analysis, constant biases have been determined and added to the triple-carrier combination shown in Eq. (1) for each continuous tracking arc such as to minimize differences between stations at common epochs. It is obvious that the variations of IFCB of GEO satellites are consistent for different stations, and similar situations are also found in IGSO satellites C06, C09 and C10. For further analysis, Table 2 provides the correlation coefficients of IFCB between different stations at common epochs for each BeiDou satellite. The correlation coefficients between any two stations are larger than 0.9 for C01, C03, C04, C05 and C06, and the corresponding values for C02 and C09 are larger than 0.7 and 0.5, respectively, indicating that the IFCB of these satellites is highly relevant for different stations. The lower correlation coefficients of other satellites may be partly due to the smaller trend terms in comparison to the dominant random errors of IFCB. Based on the above analysis, the IFCB is time- and satellite-dependent, and is irrelevant to the antenna types and station locations.

IFCB of each BeiDou satellite at five stations on November 1, 2015
Figure 3 shows the IFCB values against the satellite elevation and azimuth angles. The IFCB shown in Fig. 2 is used. Different colors represent different BeiDou satellites. It is seen that there is no obvious dependence between IFCB values and elevation angles, or between IFCB values and azimuth angles. The IFCB of IGSO satellites C07 and C08 and all MEO satellites mainly shows the characteristics of measurement noises that the value increases as the satellite elevation angle decreases.

Dependence of IFCB on the satellite elevation and azimuth angles
3.3 IFCB Estimates
The ED approach is feasible because the IFCB is time- and satellite-dependent. The WEDA proposed in this study is employed to process the datasets collected at 37 MGEX stations on November 1–14, 2015, and the IFCB of each BeiDou satellite on the fourteen days is shown in Fig. 4. The red curves are the low-frequency components of the raw IFCB time series, which are obtained with wavelet decomposition and reconstruction. The Symlet wavelet ‘sym4’ is employed. The operation is to test whether the high-frequency noises will affect the IFCB corrections in PPP. It is indicated that the IFCB varies within a range of −4 to +4 cm. The IFCB of part of GEO and IGSO satellites has obvious periodical behaviors, while it is not the case for the other satellites, which needs to be further analyzed.

IFCB of each BeiDou satellite on November 1–14, 2015
The Fourier transform (FT) is able to depict the IFCB time series through amplitude versus frequency, revealing the frequency and the amplitude of each component. Thus, the spectral characteristics of IFCB time series can be investigated in the frequency domain. The discrete form of the FT is employed, since the IFCB time series here can be taken as a discrete signal with a sampling interval of 30s. In the frequency domain, the frequency range is from the fundamental frequency to the Nyquist frequency. The fundamental frequency, also the frequency resolution, can be calculated as 1/T, where T is the time span of the signal, whereas the Nyquist frequency is half the sampling rate, i.e. 0.5/30 in this study. Figure 5 illustrates the fast Fourier transform (FFT) results of raw IFCB time series. The corresponding periods with peak amplitudes are marked in red. The peak amplitudes of all GEO and IGSO IFCB time series correspond to periods of 86,400s, whereas the periodicity of MEO ones is not obvious.

FFT results of IFCB for each BeiDou satellite
Figure 4 indicates that the IFCB varies within a range of −4 to +4 cm. For quantitative analysis, Fig. 6 shows the RMS (root mean square) statistics of raw IFCB time series over the fourteen days for each BeiDou satellite. The statistical results clearly demonstrate that the RMS IFCB is smaller than 2 cm for all satellites. C07 and C08 have the smallest IFCB with about 0.3 cm, while the RMS IFCB of C01, C03, C04 and C06 is larger than 1.3 cm.

RMS statistics of IFCB over fourteen days for each BeiDou satellite
In Eq. (5), the reliability and accuracy of ∆IFCB WA between two adjacent epochs of one satellite are determined by the number of stations that are capable of tracking the satellite successfully at the two epochs. The sum of weights can reflect the number of the stations. Figure 7 shows the average values of the sum of weights at an epoch over all the available epochs of the fourteen days for each BeiDou satellite. The sum of weights for C02 and all MEO satellites is smaller than 7.0, while the C01 and C04 ones are larger than 15.0. The corresponding values of other satellites vary between 8.5 and 11.0.

Average values of the sum of weights at an epoch over all the epochs for each BeiDou satellite
3.4 IFCB Correction
Since the IFCB of GEO and IGSO satellites has a significant daily period, the extracted IFCB of the previous day can be used to correct the observations of the second day to improve the positioning accuracy. Before this, an additional work, the assessment of the differences of IFCB between two adjacent days, needs to be done. The correlation coefficients and RMS statistics of differences of IFCB between two adjacent days for GEO and IGSO satellites are plotted in Fig. 8. The raw IFCB time series given in Fig. 4 are used. The results demonstrate that the correlation coefficients for all GEO and IGSO satellites except the C02, C07 and C08 exceed 0.8, and almost all RMS values of IFCB differences for these satellites are smaller than 0.5 cm.

Correlation coefficients and RMS statistics of differences of IFCB between two adjacent days for GEO and IGSO satellites
If the extracted IFCB of the previous day is employed, another factor should be considered, namely the difference between a solar day and a sidereal day. The difference value is about 236s. The orbit period of GEO and IGSO satellites is a sidereal day, while the observations refer to the GPS time which belongs to solar time. A time lag of 240s may be taken into account for the alignment of IFCB between two adjacent days with a sampling interval of 30s. To assess the influence of this factor, the results in Fig. 8 are re-computed with 240s lag, and then the differences between results with and without time lags are obtained. The average values of the differences over all days are displayed in Fig. 9. The results demonstrate that the time lags have no significant effects on GEO satellites. The correlation coefficients of IFCB between two adjacent days are increased by less than 0.08 for IGSO satellites, and the IFCB differences are reduced by less than 0.02 cm. Therefore, the effects of time lags on IGSO satellites are also little.

Differences between results with and without 240s lag
As to MEO satellites, the orbit repetition period is seven sidereal days. Therefore, the IFCB of the first seven days is compared with that of the second seven days for IGSO satellites. The time lag of one day is 240s, and thus the time lag of seven days is 1650s. The results indicate that no significant difference between results with and without time lags is found. The correlation coefficients of IFCB between the first and the second seven days are smaller than 0.3 for all MEO satellites, and the RMSs of IFCB differences are approximately 1 cm.
Based on the above analysis, the IFCB of C02, C07 and C08 has an obvious daily period, but the differences of IFCB between two adjacent days for these satellites are too large. The periodicity of IFCB is not significant for MEO satellites. Therefore, the derived IFCB of these satellites cannot be applied to correct the observations.
In order to assess the improvement of positioning performance due to IFCB corrections, the following three different strategies are employed for BeiDou PPP processing using datasets collected at stations cut0, jfng and sin1, which are covered by the BeiDou service of the Asia-Pacific area, on November 2–14, 2015. The three strategies can be described as:
-
Strategy 1:
B1/B3 ionosphere-free carrier phase observations are adopted.
-
Strategy 2:
B1/B3 ionosphere-free carrier phase observations are employed. The low-frequency components of IFCB extracted from the datasets of the previous day are used to correct the observations of the second day for C01, C03, C04, C05, C06, C09 and C10, while the weights of observations for other BeiDou satellites are down-weighted. The 240s lag is considered.
-
Strategy 3:
B1/B2 ionosphere-free carrier phase observations are used.
In order to eliminate the effects of code biases, only carrier phase observations are used in BeiDou PPP. The a priori receiver clock offsets calculated through single point positioning (SPP) are employed to remove the rank deficiency between receiver clock and phase ambiguity parameters. The RMS statistics are calculated using the positioning errors over the last 15 min of each session, and then the average values of RMSs over 39 sessions at three stations on thirteen days are obtained. The RMSs of observation residuals over all the sessions for each BeiDou satellite are calculated. The results are given in Table 3. It is demonstrated that the positioning accuracy of Strategy 2 is improved by 28, 30 and 45 % over Strategy 1 in east, north and up directions, respectively, and the observation residuals are reduced by 0.1–0.8 cm. However, both the positioning accuracy and observation residuals of Strategy 2 are worse than those of Strategy 3, indicating that only partial IFCB between B1/B3 and B1/B2 observations is corrected. In addition, PPP results with raw IFCB and with low-frequency IFCB are compared, and no significant difference is found. Thus, the high-frequency noises do not affect the IFCB corrections for B1/B3 observations.
4 Conclusions
BeiDou provides triple-frequency signals for all operational satellites. The joint use of multi-frequency signals has become the trend of GNSS development. Multi-frequency signals can improve the positioning accuracy and accelerate the ambiguity resolution process. However, there is an apparent inconsistency between triple-frequency carrier phases, which is known as IFCB. The IFCB variations should be carefully considered. Otherwise, the satellite clock products derived from B1/B2 carrier phase observations cannot be used for B1/B3 based PPP.
Datasets collected at 37 globally distributed stations on fourteen consecutive days are employed to analyze the characteristics of IFCB for BeiDou GEO, IGSO and MEO satellites. A weighted epoch-differenced approach is proposed to estimate the IFCB. The results indicate that the IFCB is time- and satellite-dependent, and is irrelevant to the antenna types, station locations, satellite elevation and azimuth angles. The IFCB varies within a range of −4 to +4 cm, and the RMS values of IFCB are smaller than 2 cm. There is a high correlation between IFCB of two adjacent days for part of GEO and IGSO satellites, and the RMS values of IFCB differences between two adjacent days for these satellites are usually smaller than 0.5 cm. When the extracted IFCB of the first day is used to correct the B1/B3 ionosphere-free carrier phase observations of the second day, the positioning accuracy of the BeiDou PPP based on B1/B3 is improved by 28, 30 and 45 % in east, north and up directions, respectively, and the observation residuals are reduced by 0.1–0.8 cm.
References
Elsobeiey M (2014) Precise point positioning using triple-frequency GPS measurements. J Navig 68(3):480–492
Geng J, Bock Y (2013) Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J Geodesy 87(5):449–460
Montenbruck O, Hugentobler U, Dach R, Steigenberger P, Hauschild A (2012) Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite. GPS Solutions 16(3):303–313
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2013) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solutions 17(2):211–222
Li H, Zhou X, Wu B (2013) Fast estimation and analysis of the inter-frequency clock bias for block IIF satellites. GPS Solutions 17(3):347–355
Li H, Zhou X, Wu B, Wang J (2012) Estimation of the inter-frequency clock bias for the satellites of PRN25 and PRN01. Sci China Phy Mech and Astron 55(11):2186–2193
Li H, Chen Y, Wu B, Hu X, He F, Tang G, Gong X, Chen J (2013) Modeling and initial assessment of the inter-frequency clock bias for compass GEO satellites. Adv Space Res 51(12):2277–2284
Hauschild A, Steigenberger P, Rodriguez-Solano C (2012) Signal, orbit and attitude analysis of Japan’s first QZSS satellite Michibiki. GPS Solutions 16(1):127–133
Montenbruck O et al (2011) Flight characterization of new generation GNSS satellite clocks. In: International technical meeting of the satellite division (ION-GNSS-2011), Portland OR, USA, 21–23 Sept 2011
Zhao Q, Sun B, Dai Z, Hu Z, Shi C, Liu J (2015) Real-time detection and repair of cycle slips in triple-frequency GNSS measurements. GPS Solutions 19(3):381–391
Acknowledgment
This study was supported by National Natural Science Foundation of China (Grant No. 41474025).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media Singapore
About this paper
Cite this paper
Pan, L., Zhang, X., Liu, J., Li, X., Li, X. (2016). Analysis and Correction of the Inter-frequency Clock Bias for BeiDou Satellites. In: Sun, J., Liu, J., Fan, S., Wang, F. (eds) China Satellite Navigation Conference (CSNC) 2016 Proceedings: Volume II. Lecture Notes in Electrical Engineering, vol 389. Springer, Singapore. https://doi.org/10.1007/978-981-10-0937-2_10
Download citation
DOI: https://doi.org/10.1007/978-981-10-0937-2_10
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-0936-5
Online ISBN: 978-981-10-0937-2
eBook Packages: EngineeringEngineering (R0)