
Abstract
Location-aware devices have enabled the recording of personal whereabouts at fine spatial and temporal resolutions. These temporal sequences of personal locations provide unprecedented opportunities to explore patterns of life through space-time analytics of movement and stops of individuals. At a disaggregated level, patterns of life reveal the activities and places as well as the development of routines for individuals. At an aggregate level, patterns of life suggest potential social networks and social hot spots for interactions. Moreover, the concept of “neighborhood” can become personalized and dynamic with space-time analytics to identify the spatial extent to which an individual operates and how the extent varies with temporal granularity. This chapter starts with an overview of space-time track analysis. While time geography has proven useful for analysis of space-time paths and space-time constraints on human activities, its scalability to large data sets is questionable. This chapter provides a conceptual framework and methodology for conducting space-time analysis with a massive number of space-time tracks including over a million points of moves and stops over the course of a year. The examples demonstrate the usefulness of the proposed conceptual framework and methodology to distill complex patterns of life at both disaggregate and aggregate levels that can lead to research opportunities for space-time integration in GIScience for an improved understanding of geography.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
Location-aware devices have enabled the recording of personal whereabouts at fine spatial and temporal resolutions. These temporal sequences of personal locations provide unprecedented opportunities to explore patterns of life through space-time analytics of movement and stops of individuals. At a disaggregated level, patterns of life reveal the activities and places as well as the development of routines for individuals. At an aggregate level, patterns of life suggest potential social networks and social hot spots for interactions. Moreover, the concept of “neighborhood” can become personalized and dynamic with space-time analytics to identify the spatial extent to which an individual operates and how the extent varies with temporal granularity. This chapter starts with an overview of space-time track analysis. While time geography has proven useful for analysis of space-time paths and space-time constraints on human activities, its scalability to large data sets is questionable. This chapter provides a conceptual framework and methodology for conducting space-time analysis with a massive number of space-time tracks including over a million points of moves and stops over the course of a year. The examples demonstrate the usefulness of the proposed conceptual framework and methodology to distill complex patterns of life at both disaggregate and aggregate levels that can lead to research opportunities for space-time integration in GIScience for an improved understanding of geography.
20.1 Time Geography as the Conceptual Foundation
Time geography has long been the de facto framework for geographers to analyze space-time activities of individuals and the everyday workings of society at locales of operation (Berry and Linoff 1997). Central to this analytical framework is an emphasis on modeling individual behavior, not just empirical analysis of large groups (Morrill 2005). Hägerstrand’s seminal work on What about People in Regional Science advocated for attention to individual human beings in an increasingly complicated environment to examine the quality of life for of individuals and collectives. To support such research, he proposed the basic framework of time geography, including the concepts of lifelines, stations, bundles, domains and prisms (Hägerstraand 1970). Advances in geospatial information analysis and visualization have led to significant research developments in time geography, such as computing activity-travel patterns of masses of individuals (Kwan 2004), activities and interactions in a hybrid physical-virtual space (Shaw and Yu 2009), accessibility with varying travel velocity (Miller and Bridwell 2009), and many other improvements. This chapter offers yet another improvement to time geography with a new approach to examining daily space-time paths of individuals with intensive observations through location-aware devices. We have developed conceptual and computational frameworks for space-time analytics of daily movements of individuals to project their patterns of life and potential social networks. The basic concepts of time geography are used to recognize lifelines, stations, bundles, and domains (Fig. 20.1), but we introduce patterns of life, locales and social networks to construct geospatial narratives of their routine activities, stages in life, and opportunities for social interactions.

Basic conceptual elements of time geography (Adapted from Hägerstraand 1970)
The proliferation of location-aware devices has led to detailed accounts of entity-location interactions. What are the usual paths that an individual commutes from residence to work? What are common stops along these paths? What are the routine activities that an individual participates in over a period of time? How have the routine activities evolved over time? When and what are occasional outings or routes that one took previously and for what purposes? What are the potential social interactions among individuals? What kinds of and where are places that individuals like to hang out and when? These questions seek to identify patterns of life, socially significant places, and changes in routine activities in space and time. In time geography, lifelines are comparable to the space-time paths taken by individuals, stations correspond to locations visited by individuals, bundles capture locations where multiple individuals visited within space-time proximity, and domains correspond to the spatial extent in which individuals operate. While the conceptual mappings work well, time geography offers no specific quantitative movement analysis of empirical data (Miller and Bridwell 2009).
20.2 From Time Geography to Trajectory Analysis
Along with the growing use of location-aware devices, there are increasingly ubiquitous surveillance sensors. With the availability of location data and sensor data for moving objects, trajectory analysis has quickly gained popularity in GIScience and related disciplines. The often massive, intensive trajectories recorded by location-aware devices or geo-sensor networks at fine spatial and temporal resolutions challenge management, query and analysis of trajectory data (Spaccapietra et al. 2008). In contrast to time geography, trajectory studies have required the development of quantitative methods for movement analysis. In time geography, multiple modes of transportation influence an individual’s accessibility in a space-time aquarium with conceptual elements of lifelines, prisms, bundles, etc. that represent human activities. Innovative tools are being developed to visualize such space-time aquaria with functions to query and analyze these conceptual elements (Shaw and Yu 2009). Complementarily, trajectory analysis and trajectory mining, emphasizing the ability to handle massive data, explore effective ways for data aggregation and generalization (Andrienko and Andrienko 2011).
While location-aware devices and geo-sensor networks both provide space-time data on moving objects, the two approaches observe movements in different ways. Surveillance sensors monitor movements in an area, such as severe storms or hurricanes in a region, traffic flows on a highway, vehicles in a parking lot, or patrons at a building entrance. Each object has one trajectory with one activity (e.g. entering a building), and each trajectory is assumed tangent and continuous between beginning and ending points. Location-aware devices or personal diaries (such as geo-tagged tweets or photographs), on the other hand, record the locations of individuals over space and time. One space-time path taken by an individual may result from multiple activities (e.g. driving, working, shopping), and therefore, may consist of multiple trajectories (Fig. 20.2). Trajectory analysis on both data sources has been built upon descriptive and predictive analyses of trajectory descriptors, similarity indices, clustering patterns, and individual-group dynamics (Long and Nelson 2012). A suite of parameters and derivatives is being built to characterize primitive and compound movement patterns (Dodge et al. 2008), which can serve the basis for a systematic development of quantitative methods for trajectory analysis.

Path and trajectories: Trajectories are defined through the semantic segmentation of a path. Some parts of the path are irrelevant to the application of interest and do not belong to any trajectory (Adapted from Spaccapietra et al. 2008)
Units of trajectory analysis usually are trajectories, trajectory segments (a.k.a. sub-trajectories, Fig. 20.3), and stops. Measures of trajectory geometry or density are common identifiers for clusters or outliers. Gaffney and Smyth (1999) proposed a model-based clustering algorithm with a probabilistic mixture regression model and the Expectation-Maximization algorithm to analyze hand movement. A similar approach is used to analyze tracks of extratropical cyclones (Gaffney et al. 2007). By segmenting a trajectory into trajectory segments, movement parameters, such as duration and speed (Dodge et al. 2012) and semantic behavior, such as shopping and work (Popa et al. 2012), can be associated with these features along trajectories for analysis. This approach enables us to extract local behavioral patterns of mobile objects rather than global patterns for the entire trajectories. Several algorithms are designed for trajectory segmentation, such as density-based clustering TRACLUS (Lee et al. 2007), Geometry-based Representativeness (Panagiotakis et al. 2012), and Velocity-based Trajectory Structure (Yan et al. 2012).

Trajectories and sub-trajectories (Adapted from Lee et al. 2007)
In contrast to segmentation, aggregation and connectivity among trajectory segments provide insights into the global trajectory patterns. Andrienko and Andrienko (2011) introduced a trajectory aggregation technique by partitioning the space into compartments, transforming raw trajectory data into moves between the compartments, and aggregating the transformed moves with common origins and common destinations. Guo et al. (2010) proposed a graph-based partition method incorporating the use of trajectory topological relationships to find spatial structures and general patterns of trajectories that were visualized in 2D trajectory density maps at several temporal snapshots. These spatial structures or clusters often lead to interesting semantic implications.
Semantic enrichment contextualizes trajectory segments with behavioral characteristics. Eagle and Pentland (2006, 2009) applied the principle components of movement data, termed eigen-behaviors, to capture the structure of behavioral contexts of individuals, such as staying at home, work, or elsewhere. Availability of a context-rich dataset is a critical factor for success for empirically based research of semantic tracks (Giannotti and Pedreschi 2007). Using bus routes and bus stops data and manually labeled modes of transportation (e.g. foot, bus, or car) to trajectory segments, Patterson et al. (2003) obtained 84 % accuracy in predicting modes of transportation with GPS data sampled at 2–10 s intervals over 3 months during outside activities of the individuals being studied.
The combination of geometric and semantic trajectory analyses deepens the level of behavioral knowledge that can be discovered from trajectories, such as trajectory clusters (grouping), trajectory categories (typing), trajectory sequences (transitioning) and trajectory aggregates (flocking). Laube et al. (2007) introduced a methodology for lifeline context operators and standardizations, and explored the spatio-temporal behaviors of homing pigeons using the sinuosity, rate of change of trajectory sinuosity, navigational displacement, relation between distance to loft and flight sinuosity. Dodge et al. (2009) identified local motion descriptors (i.e., motorcycle, car, bicycle, pedestrian) and global and local motion descriptors (e.g., velocity, acceleration, turning angle, straightness index) as movement signatures to differentiate trajectories from different types of mobile objects. Similarly, Willems et al. (2009) applied Kernel Density Estimation (KDE) to visualize movement patterns of seafaring vessels. The density based visualization has shown to be useful in identifying movement types (e.g. walking or driving; by vessels or speed boats) and gathering places.
Besides mining trajectories from mobile collectives, attention to episodes along individual trajectories offers new insights into behavioral changes in mobile objects, such as one person taking multiple modes of transportation (e.g. bike to a bus stop, ride a bus, bike to building bike rake, and walk into a building), and when mining data streams, the movement patterns of individuals can be revealed in real time (Yan et al. 2011). MobiVis is but one tool developed to visualize social-spatial-temporal patterns of mobile data (Shen et al. 2006; Shen and Ma 2008). The tool incorporates heterogeneous network and semantic filtering techniques based on associated ontology graphs, and the visualization technique of behavior rings that reveal periodic behavioral patterns of individuals and groups.
20.3 From Trajectory Analysis to Space-Time Analytics
Generally speaking, time geography or trajectory analysis approaches explore individual tracks over time or collective tracks within a confined area. Most studies examine geometry, semantics, clusters, classifications, and entity-location interactions of discrete tracks or attempt to generalize a collection of tracks. Whether tracks are taken for the same mobile object is seldom considered, and therefore, methods to reveal routine and incongruent movement patterns are missing in the literature. Yet, temporal patterns that depict transitions between routine and incongruent movements reflect shifts in patterns of life and are essential to many domain applications, in which geospatial distributions of patterns of life and movement are indicative of individual’s spatial social adaption or as a measure of a population’s collective spatial-social pulses.
Under the assumption that people develop routines and follow these routines over time, their patterns of life form through settling down to the regular activities that take place in space and time. Movement is the process that people engage in to get to the target place at the right time, and congruent movement patterns suggest the formation of space-time routines and therefore, spatial patterns of life. For a population, the summative characteristics for the progression in forming patterns of life and spatial differentials of the process show how a society (or a community) may foster faster or slower adjustments for newcomers and where and when people are gathered in the society.
Analytics remains an ambiguous term that often serves as an umbrella term for statistics, data mining, modeling, simulation, and computational methods to discover and communicate meaningful patterns in data (Shmueli and Koppius 2011). Yet, analytics commonly emphasizes data-centric and data-driven approaches to tackle massive, streaming, heterogeneous and/or unstructured data, especially in business management and marketing (Lavalle et al. 2011), education (Wagner 2012), website use (Marek 2011), and many other applications. In this chapter, we define space-time analytics as methods to simplify the complexity of space-time data into elements and structures that capture the useful information embedded in the data. We emphasize elements and structures that together reveal useful space-time information. Tracks, track segments, stops, and moves are examples of elements in track analysis. Aggregates or disaggregates of these elements may also be useful elements to decipher movement patterns for individuals or collectives. Structures are proximity, connectivity, ordering, or relationships in space, time, and semantics. Here, semantics simply refers to the element’s characteristics and meanings of interest. Kinship, for example, is a semantic relationship, and so is management in an operation and participation in a social network or organized/unorganized activity. With this emphasis, space-time analytics focuses on what space-time elements and structures pertain to the research questions of interest and how to elicit these elements and structures from complex data.
20.4 A Conceptual Framework for Space-Time Analytics of Tracks
The conceptual framework of space-time analytics of tracks proposed below, extending the conceptual frameworks of time geography and trajectory analysis, aims to discern space-time patterns of multiple tracks repetitively taken by given individuals, and from the space-time patterns to interpret spatial patterns of life for individuals, their potential interactions, and the spatial patterns of social pulses in the related population. Clarification of terminology is important to communicate concepts precisely. While many terms seem have inconsistent meanings in previous studies, great attention is given to avoid incompatibility of the terms used in the proposed conceptual framework:
-
Path: the actual route that one took. A path usually follows transportation networks or existing pathways except when travelling in an open space such as a yard, plaza, air or sea.
-
Track: the line formed by connected observed locations. A track is based on observations taken by GPS points, geo-tagged media, or journey narratives. With a track we know temporally ordered locations visited by a mobile object, but we don’t know exactly the path that the object took to travel from one location to the next.
-
Trajectory: the expected route that one took from one location to the next. A trajectory is a movement estimate based on space-time continuum and space-time constraints. For a car and two consecutive observations of its locations, its trajectory is expected to follow one of the road options between the two locations, except for accidents such as driving into a lake. With a surveillance video, identified individuals are assumed to move within a space-time continuum. Spatial and temporal interpolation methods can be used to estimate the possible trajectories between two known locations.
-
Stops: locations on a track where a mobile object stays over a length of time beyond a specified duration. A car makes stops at traffic lights, a person stops by a convenience store, and a train stops at a city station. A specified duration may be 30 s, 10 min, an hour, or a week, etc. depending upon what meaningful information may be in the problem domain of interest.
-
Moves: locations on a track where a mobile object stays shorter than the specified threshold duration. Locations where an object moves have instantaneous velocity, even though there may not be data available for velocity calculation. A track is composed of temporally ordered observed locations at which the mobile object of interest either stops or moves. In addition to the threshold duration, spatial and temporal granularities can influence the determination of stops and moves locations as well as locations along respective tracks.
Minimal spatial and temporal granularities are subject to observations and can influence decisions on points of stops and moves. At a fine space-time granule, for example sub-meter and second, detailed motion can be recognized, such as taking a step forward and the point will be determined as a move. However, if the space-time granule is at 10 m and 5 min, a step forward is likely to be within the granule and therefore will be considered as a stop. The final decision of stops and moves is subject to the defined space-time threshold, say 20 m in an hour, which will consider a collection of points within 20 m in an hour as stops, but for a point which next point is beyond 20 m in an hour will be consider a move point. Determination of a proper space-time granule depends on the instrument taking observations (such as GPS or twitter) as well as the application of interest.
There are two kinds of structures for the elements of paths, tracks, trajectories, stops, and moves: time-oriented or space-oriented structures. For time-oriented structures time is considered the first order principle of organization that connects points of stops and moves over space to form different kinds of movement lines. At a basic level there are locations of stops and moves that are recorded as observations. Estimated pathways between temporally consecutive locations of stops and moves are trajectories, while straight line connections between these locations form tracks. Connections between these locations based on the actual route travelled results in a path for the journey.
Alternatively, space is considered the first order principle of organization for space-oriented structures. Space connects points of stops and moves over time to form visit histories at locations. Some locations may be visited on a regular basis, and others may be visited only occasionally. Frequency and timing of visits may vary from time to time. Passing-by locations involves only points of moves, other locations may have only stop points or mixed stops and moves. Moves by a location may be at different speed or in different direction. Stops at a location may be long or short. Passing by a location that has in the past been a traditionally stopping may signal a change in spatial behavior (such as no longer eating at a given fast food restaurant) or pattern of life (such as no longer needing to use day care services for children). Changes in how an individual moves at locations can also be revealing, such that speeding out of a work parking lot may be indicative of urgency.
Chronological time (a.k.a. calendar time) can serve the temporal structure necessary for a time-oriented organization. Geographic space is two-dimensional and is commonly referenced by x and y coordinates. Regular tessellation of space is commonly used as the framework for discrete global grids, such as the Military Grid Reference System, regular hierarchical triangulation (Dutton 2000), hexagonal quad balanced structure (Tong et al. 2010), equal-areal cells (Beckers and Beckers 2012), and many other partitioning and subdivision systems (Lu et al. 2012). Any of the geographic coordinate systems or discrete global grid systems may serve the purpose of spatial ordering. One particular example is Geohash system (Geohash n.d.) that constitutes string-based prefixes as keys for coordinate sets in a hierarchical grid system (Fig. 20.4).

The hierarchical structure of Geohash grids progressively refines spatial granularity as the length of Geohash strings increases (Geohash). Geohash strings are highly efficient in coding spatial precision as compared to latitude and longitude pairs as well as other Cartesian coordinate systems
Geohash was invented by Gustavo Niemeyer to create a concise spatial indexing and data caching system for web services. Geohash is essentially a latitude and longitude geocode system that interleaves bits obtained from latitude-longitude pairs and converts the bits to a Geohash string using Base 32 character map. For example, the latitude-longitude pair (35.18, −97.44) falls in the box with Geohash code 9y68nuckb with approximately 2 m precision at Level 9. The string length (e.g. level) of a Geohash code corresponds to the size of spatial granule. Generally speaking, points closer to each other are likely to have longer common prefixes in their Geohash codes. In most cases, all adjacent Geohash boxes only differ in the last digit of their Geohash codes, except for the edge boxes that adjacent boxes have different codes in the last two digits (Fig. 20.5). Exceptions also include Geohash boxes near the Equator and Greenwich Meridian.Footnote 1 The hierarchical organization of Geohash codes facilitates rapid data grouping and efficient proximity search to meet computational demands (Balkic et al. 2012). Geohash grids have been implemented in Google Map, MySQL, PostGIS and MongoDB as well as libraries or modules for Java, Javascript, Python, Perl, PHP, Pure Ruby, C, and many other programming languages.

Examples of Geohash codes at Levels 4 and 5 and the alternate ordering schemes for codes at even and odd levels. All codes at one level are of the same length. Codes in every 8 × 4 or 4 × 8 unit are only differentiated by their last digits
Both chronological time and Geohash space provide structures in which space-time elements of stops, moves, and tracks can be referenced to develop analytical methods and distill higher level information from primitive observations. Below are methods of space-time analytics based on the elements of tracks, stops, and moves and associated time-oriented and space-oriented structures to discern patterns of life with a case study to illustrate the procedures and potential findings.
20.5 Space-Time Analytics of Tracks to Elicit Patterns of Life
Here, patterns of life are space-time summaries of movements and from the summaries to project activities. Since trajectories and paths cannot be directly derived from location observations, additional assumptions, information and modeling projections are required to determine the most likely trajectories and paths taken by individuals. Methods to construct space-time summaries of movements are based on stops, moves, and tracks from observed or recorded locations. To facilitate the discussion, we use GPS observations for several individuals in Oklahoma, USA to step through Space-Time Analytics procedures.
20.5.1 Stop Analysis
Location-aware devices record GPS points at regular intervals. Unless the devices are equipped with a motion sensor, GPS location data files consist of streams of time-stamped spatial coordinates. Where an individual frequently visits and how the person usually travels to these places are fundamental space-time elements to understanding the person’s pattern of life. Therefore, the first step of space-time analytics is to distinguish stops and moves on tracks that the person took.
A convenient way to differentiate which GPS points correspond to stops from those GPS points that were taken when one was in motion is based on how long one stayed at these locations, which is reflected in differences of time-stamps or by spatial clusters of GPS points (Palma et al. 2008). For tracks taken by individuals, clusters may not be apparent due to the number of sample points taken in periods of short duration. Therefore, we propose two scale parameters, a duration threshold (τ) and a distance threshold (δ) to determine stops on a track. Duration thresholds, e.g. greater than 5 min, may be used to include short duration stops such as the use of drive-through windows at business establishments. Longer duration thresholds may reflect locations for major activities, such as τ = 30 min or longer for shopping or dining. A distance threshold is used to determine a geographical size of stop events. A smaller distance threshold may filter GPS sampling noise and determine stop events consisting of small locational variations, e.g. waiting at a bus stop in urban space, whereas a larger distance threshold can determine stay events that potentially include movement activities such as playing at a park.
Figure 20.6 illustrates the algorithm for differentiating stops and moves from collected GPS points based on two threshold values. A GPS track TR is composed of a sequence of 3- or 4-dimensional GPS points, Tr = {p 1, p 2, p 3, …, p k} where k denotes the number of points in the track, p k = {x, y, (z), t} where (x, y) are longitude and latitude, z is altitude, and t is timestamp. Based on the distance threshold, the algorithm finds anchor points (pa), which differentiate between stops and moves, and each stop or move is composed of a set of GPS points between two consecutive anchor points. To find anchor points, we begin with the first and the last points of a track as anchor points (pa 1, pa n). Then, we calculate a segment distance between two GPS points starting from the first point and check if it exceeds the distance threshold. In Fig. 20.6, the distance between p 1 and p 2 exceeds the distance threshold; therefore, the segment cannot formulate a stop. Moving to the next point, the distance between p 2 and p 3 is less than the threshold value, and thus the segment is a candidate for formulating a stop. When such a segment is identified, the first point becomes an anchor point (pa 2). Then we calculate the segment distance between the anchor point and its following points until the distance exceeds the threshold value. When the threshold is exceeded (a red dashed-line between p 2 and p 9), the last point (p 8) becomes an anchor point (pa 3). Lastly, if the duration between two anchor points (pa 2 and pa 3) is larger than the duration threshold, GPS points enclosed by those anchor points formulate a stop event; otherwise, anchor points will be released.

A stop detection algorithm based on duration and distance thresholds
In our case study for stop analysis, we used GPS points of one individual collected over a 6-month period between 5/1/2009 and 10/31/2009. Figure 20.7 illustrates GPS points (left) and the stop-events distribution identified by the duration-distance thresholds algorithm, where τ = 1 s and δ = 20 m. In this case, the duration threshold is set to 1 s in order to extract all possible stops. The algorithm extracted stops with short-duration near the street intersection suggesting stops due to traffic lights. It also identified several long stops such as one in a residential area possibly for one’s dwelling place, one in a commercial district located at south-east corner of an intersection (B), and one at a golf course nearby a lake (A).

GPS points and extracted stop-event distribution for a month (9/1/2009 to 9/30/2009)
After the stop locations are extracted from the GPS point data, the similarity between 2 days of stop points can be calculated for temporal analysis. For example, over the time range of a dataset, one day of stops can be compared to its previous day of stops to explore if any weekly stop pattern emerges, or one day of stops can be compared to the same day the week before to investigate if a pattern of stops is congruent or incongruent for a specific day of week. To measure similarity, various functions can be applied such as Sum-of-Pairs Distance (Li and Goodchild 2012), Dynamic Time Warping (Li et al. 2011), and Longest Common Subsequence (Böhm et al. 2011).
In our case study, we have employed a simple similarity measure, Sum-of-Closest-Pairs Distance (SCPD). In this measurement, we find the closest pair of points from two stop point datasets and calculate the sum of the distance between them. Given two sets of stop points A and B, SCPD is calculated as follows:
Figure 20.8 shows similarity distance comparisons for one day of stops to the previous day over a 6-month period (5/1/2009–10/31/2009). In this analysis, we use a duration threshold of 5 min in order to ignore very short stop events such as stops at traffic lights. The unit of similarity cost is measured in kilometer and a lower distance value denotes similar stop-events between 2 days. The color of data points represents a day of week, and it reveals weekly pattern of extracted stop-events. For example, Saturday’s stop events are quite different from Friday’s throughout the time period. In addition, Thursday’s are also different from Wednesday. Moreover, stops between Saturday and Wednesday are relatively similar (low distance in the box a in Fig. 20.8). This regularity corresponds to the 5-day and 2-day weekly pattern suggesting that the individual may have a regular weekly work pattern. In fact, stop points for those 5 days (Saturday to Wednesday) are found in the area A in Fig. 20.7 and not the other 2 days (Thursday and Friday), which implies that the location could be his/her work place.

Individual stop similarity over a 6-month period
Alternatively, space can serve as the first order structure for analysis of patterns of life, investigating location-focused frequency and duration of stops distribution over time is a useful exploratory analysis. The bar chart in Fig. 20.9 visualizes stop-events frequency and duration distribution for two locations (A, B) in Fig. 20.7. Each bar on the graph represents a single stop-event and its vertical length represents the duration. The x-axis orders stops by day of the week. Two graphs from the top in Fig. 20.9 show stop-events frequency and duration for location A, while the bottom graph is for location B. This chart provides basic understandings of how an individual utilizes a particular place along with his/her life schedule and reveals, for example, a daily/weekly stop pattern regularity and pattern shift over time.

Frequency and duration of stops over days of the week and over time of the day
For the location A, first, the chart reconfirms that there is no stop-event on Thursday or Friday during a 6 month period. In addition, the stop-events observed in the location A are within a fixed time interval mostly between 6 a.m. and 2 p.m. These two patterns, 5 days in a week and 8 h in a day, further reinforce our previous indication to infer that the location A is likely to be his/her work place. On the other hand, the stop-events in location B are found only on Wednesday and Thursday between 5 p.m. and 8 p.m. The location B is a commercial area including several shops and restaurants, and the individual’s activity may be shopping or eating out on Wednesday after work or on Thursday, which appears to be a day off work. In addition to these daily and weekly patterns, we can identify a pattern shift over time. Thursday’s stop-events at the location B are only found in June, July, and August. The individual activity has been shifted from Thursday to Wednesday in September and October.
20.5.2 Track Analysis
A track consists of stops and moves. In the context of patterns of life, track analysis aims to reveal one’s routines or regularity in space and time. The consideration includes regularity in time (e.g. leave home at 7 am for work), in space (e.g. take the same route to work), and in activities (e.g. do grocery shopping on the way home every Wednesday). Therefore, track analysis examines the degree to which points of stops and moves from track to track vary in space and time. One extreme case is a perfect match of stops and moves in space and time across all tracks for an individual, who follows a rigid daily routine and hence exhibits an unambiguously regular pattern of life. In such a unvarying daily routine, there is no deviance of stops and moves between tracks, and the degree of space-time deviance should be minimized or zero if all points of stops and moves across tracks are perfectly matched.
The other extreme case is a total random walk, in which every location in space and time enjoys the same probability being visited or passed by. The individual would have no routine resulting in an accidental pattern of life. The degree of space-time deviance would be maximized or approaching infinity depending on the numbers of stops and moves on these tracks. Most of our patterns of life fall in between the two extremes. Demographic characteristics (e.g. age, gender), social-economic factors (e.g. kinds of employment, means of transportation), local knowledge (e.g. new residents) and neighborhood effects (e.g. public safety, restricted zones) all contribute to the development of one’s pattern of life in space and time. Nevertheless, space-time analytics of tracks to elicit patterns of life assumes that everyone will develop regular spatial routines over time, and the spatial routines may follow chronological cycles, e.g. hourly daily, weekly, monthly, seasonally, or other longer cycles. Space-time deviance is then expected to fluctuate according to these cycles.
Determination of space-time differences between any two tracks is not trivial. GPS observations were likely taken at different time intervals and at different times. Even if a person leaves home at the same time and takes the same route for a 2 day period, GPS points of stops and moves along the track for the first day will not match exactly the track for the second day. Resampling is one technique that can be used to adjust the shifts in location and time of GPS observations (Fig. 20.10). Resampling along tracks allows all tracks in consideration to have the same number of GPS locations during a period of interest for comparison. The resampled time interval should be determined by spatial and temporal variability in the application domain of interest. For daily patterns, identification of hourly changes in space and time may be sufficient. For seasonal patterns, daily or weekly changes may be more meaningful than hourly variations.
Assuming that the time resampling interval is T (say an hour) in Fig. 20.10, the mean center of all GPS points taken T ± ΔT/2 (e.g. 30 min before and after an hour) will be assigned to the location to time Ti (e.g. on the hour). When there are no GPS points taken within T ± ΔT/2 (e.g. 30 min before and after the hour), the mean center calculated for Ti−1 (e.g. the previous hour) is assumed to be the representative location at Ti (e.g. on the hour). In addition, when there is no GPS location in the initial hours of the day, the first known GPS location is assumed to be the locations for these initial hours. An example would be if an individual left home at 9 am, comparably later than 7 am on the previous day. The approach assumes that the individual was at home at 7 a.m. to 9 a.m. The resampling procedure results in the same number of locations and the same number of time intervals on all tracks in consideration for comparative analysis of space-time difference.

Resampling tracks to match locations and time intervals to facilitate calculation of space-time deviance between two tracks
Furthermore, GPS locations carry spatial uncertainty. GPS technology at a survey grade can obtain centimeter accuracy, but consumer grade GPS receivers may have spatial uncertainty to tens of meters. Precise latitude and longitude readings of GPS may be misleading in terms of location accuracy. Therefore, the use of Geohash codes, instead of latitude-longitude readings, will better preserve the innate spatial uncertainty in track analysis.
After resampling and converting coordinates to Geohash codes, track analysis can compare locations at each time interval to determine if similar tracks were taken on these days. Geohash codes condense two dimensional latitude-longitude pairs to one text string, in which the distance comparison can be based on the length of common codes and the distance represented by the differences of digits at the end of the Geohash strings. Figure 20.11a shows an example of an individual that was at different locations in the fifth time interval across 2 days. This could be due to detours or traffic conditions that caused the individual to be ahead or behind the locations at this time on the previous days. Comparison can also be made using distances between adjacent locations on the same track on different days but in the same time intervals to determine changes in travel speeds from day to day (Fig. 20.11b). Furthermore, daily groupings of strings of consecutive Geohash codes (like the horizontal groupings in the shaded boxes in Fig. 20.11b) reveal the daily patterns of stops in common locations. In this illustrative example, the individual stayed (long stops) at 9y69gmob in the morning and returned to the same location at night on Day1 and Dayn, but the person stayed at the location all day on Day2, which suggested that the location is likely to be the individual’s residence.

Comparison of tracks to determine space-time deviance: (a) comparing locations across days at the same time to reveal changes in tracks; (b) comparing distances in adjacent locations to reveal changes in travel speed. The vertical line graphs show space-time deviance in locations between two tracks (a) or in adjacent locations on the same track (b) over the days of interest (Day1, Day2, … Dayn)
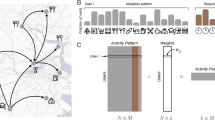
In addition, differences in space and time across tracks as shown in separate line graphs in Fig. 20.11a can be converted to a space-time-track image with a brighter shade indicating a greater difference along tracks (Fig. 20.12). In a space-time-track image, each row corresponds to a track, and each column represents resampled time intervals along these tracks. The lighter a cell denotes a smaller spatial difference of this track from the previous track. Measures of spatial difference can be based on Euclidean distance, travel distance, or some other cost metrics. If the track taken on Dayi is identical to the track taken on Dayi−1, the row for Dayi in the image will be black throughout. Otherwise, the spatial difference from the track on Dayi−1 at Timej will be stored in the cell (Dayi, Timej).

A space-time-track image showing spatial differences in daily track comparison. The difference is determined for each time interval by the spatial difference of a track to that of the previous day. The circles mark examples that may suggest incongruent patterns or new activities
Figure 20.12 shows a space-time-track image based on an individual’s GPS tracks for 215 days. There are two key re-occurring features in the image. One feature consists of repetitive sets of two bright lines starting around Day 35 to Day 215. The bright lines correspond to spatial differences between Fridays and Saturdays as well as Sundays and Mondays. The dark lines in-between reflect the greater similarity between tracks recorded for Saturdays and Sundays. The second re-occurring feature is the progression of the scattering bright spots developed over these days in the late night hours. These late-night outings could be for social events or a night job, which can be further explored by mapping stops and moves on these days and times to determine places that the individual visited. The space-time-track image also includes incongruent features. Examples are marked by circles in Fig. 20.12. These incongruent features could be indicative of new or occasional activities.
Furthermore, the daily total of spatial difference (e.g. the row sum in the space-time-track image) reflects the cumulative difference of a track compared to the track taken on the previous day. If an individual more or less took the same route to work, the person’s daily track would be quite similar and therefore resulted in a small cumulative difference along a track. On the other hand, if one was wandering around town, the person’s daily tracks could be very different and the cumulative difference would be large. Figure 20.13 shows a time series of daily cumulative differences of tracks based on the values in the space-time-track image in Fig. 20.12. The time series shows comparably large fluctuations in the early days and then some small fluctuations before settling into a rather regular pattern.

A time series of daily accumulative differences among tracks
A possible interpretation of the pattern is that the individual was new to the area, wandered around and narrowed his/her job search to a specific region. Once the individual found a job, the person tried different routes to work (circle a in Fig. 20.13) and then settled with a regular route to commute. The regular fluctuations correspond to track differences in weekdays and weekends. After the person settled down to a regular routine for a while, the person’s pattern varied again, which might be due to exploration of one’s neighborhoods or participation in social activities (circles b, c, and d in Fig. 20.13), and eventually grew to a new pattern (circle e in Fig. 20.13) which can be related to the late-night outings in Fig. 20.12. While the interpretation is speculative and requires validation with interviews or auxiliary data, the example shows that daily cumulative differences in track analysis can reveal the development of and changes in patterns of life implied by an individual’s movements in space and time.
20.5.3 Identify Opportunities for Interactions in Space and Time
In the framework of time geography (Fig. 20.1), paths in proximity in space and time can be considered to coexist and therefore offer opportunities for interactions (Fig. 20.14). Similar ideas can be used to identify individuals with opportunities to interact based on their proximity in space and time. Studies may focus on opportunities for sustained interactions and therefore discount the cases when two people pass by each other in transit, and therefore only locations of stops are considered for analysis. Other studies may include instantaneous interactions during passing.

Space-time coincidence indicative of opportunity for interactions
The Geohash system provides a convenient spatial structure to determine proximity for its grouping efficiency. For a Level 9 Geohash, the default spatial proximity is set at 2 m, and for Level 8 Geohash, 30 m. All stops for all individuals of interest are included in the analysis. However, like all discrete grid systems, locations along the boundary of adjacent grid boxes can be within the proximity threshold even though these locations are not in the same grid box (i.e. the fault line issue). Therefore, proximity examination needs to include locations in all Geohash boxes adjacent to the box of interest.Footnote 2 Figure 20.15 provides an example of the adjacent Geohash boxes needed for analysis of nearby points. The spatial proximity needs to be adjusted to about 5 m for Level 9 and 45 m for Level 8 Geohashes.

Consideration of proximity should include locations in adjacent Geohash boxes
Once the Geohash Level is determined, all stops falling in the same Geohash box as well as in adjacent Geohash boxes are grouped. The analysis then proceeds one group at a time to determine stops within temporal proximity. Both spatial proximity and temporal proximity should be defined based on application domains. Individuals can sit next to each other in a basketball game or run far apart in a marathon race. One can drop a package at a friend’s house, and another person might pick up the package an hour later. There are four types of space-time constraints on communication (Janelle 1995). Spatially, communications can take place among individuals who are in presence or telepresence, and temporally, it can be synchronous or asynchronous. The four types of space-time constraints on communication can also guide for the conceptualization of interactions.
Once the proper thresholds for spatial proximity and temporal proximity are determined, Euclidean distance (or travel distance) and time differences can be calculated among locations in a group to determine stops that are within the desired spatial proximity and temporal proximity. Individuals within the spatial and temporal proximity can then be identified and connected for a social network of potential interactions. In a case study of 50 individuals in a suburban town (Moore, Oklahoma, USA), we define the space-time proximity as within one level 8 Geohash grid (∼45 m) and 30 min. Eleven of the 50 individuals are within space-time proximity of synchronous presence over 553 days of the study period (3/4/2009–9/8/2010). The width of an edge corresponds to the relative frequency of the potential to meet. The connection between person ID 16 and person ID 30 is an example of a strong connection with a relatively high frequency for potential meetings in places where both individuals visited at about the same time (Fig. 20.16). Individuals with IDs not listed in the social network have no records of presence within the defined space-time proximity to other individuals in the study.

An example of a social network based on space-time proximity that implies opportunities for interactions
20.6 Concluding Remarks
Data Science and Big Data challenges are prominent research issues with the fast growing body of spatio-temporal data being generated across many domains and applications. With the popularity of GPS devices, location-aware devices (including smart phones), geotagged tweets and photographs, and numerous other means, we can attach location information and record movements for animals, people, goods, and services. While time geography offers a rich conceptual framework to examine spatial behavior and interactions among individuals, research on trajectory analysis, trajectory mining, and more generally, mobile object modeling has developed many statistical or computational methods to identify clusters or detect outliners in movement data. Many of these studies considered only geometric or semantic properties of trajectories. Instead, this chapter advocates for a space-time analytics approach to examine reoccurring movements of individuals and from the reoccurring movements to identify patterns of life and their opportunities for interactions based on proximity in space and time.
The chapter defines the terms: paths, tracks, trajectories, stops and moves, while the meanings of these terms may vary in the literature. Paths are actual routes taken by individuals, tracks are composed of observed locations, trajectories are interpolated paths between observed locations, and stops and moves are observed locations with durations of non-movement in transit. Space-time analytics of tracks emphasize elements of tracks and how the elements may be structured for analysis. Stops, moves, and track segments are considered in this chapter as elements of tracks, and Geohash boxes and chronological time are used to structure space and time for georeferencing and sequencing stops and moves to form tracks for analysis. Spatial clusters and time spent at locations are criteria used to identify stops along tracks. Analysis of stops reveals the place where an individual frequently visits and visiting patterns. Observed locations are resampled to form tracks with stops and moves in Geohash codes at common time intervals.
Comparison of corresponding Geohash strings at time intervals reveals how an individual might have taken a different route or changed travel behavior (left early/late or at a higher speed). In this chapter, we show three ways to compare tracks: (1) line graphs that show variations across multiple days; (2) space-time-track images to highlight high and low differences in tracks throughout a day and across multiple days; and (3) summative line graph to show cumulative daily track differences across multiple days. The three ways progressively characterize individual’s movements, recurring track differences over time that can lead to inferences about the individual’s pattern of life. Moreover, space-time proximity of stops along tracks is used as a proxy indicator for potential interactions among individuals. We briefly described a case study with daily tracks from 50 individuals, identified 11 in a space-time proximity to each other, and connected these 11 individuals in a social network with edge widths representing the frequency of the two individuals within the space-time proximity. Locations of stops within the proximity can be mapped to show potential meeting places.
Space-time analytics of tracks for the understanding of patterns of life is rooted in the premise that space-time research in GIScience must connect what we learn from the data to the underlying geographic dynamics that generate the data. Space-time data are observations about activities, events and processes. Space-time analytics aims to discern elements of these geographic dynamics and recognize structures among these elements to capture the spatiotemporal characteristics of activities, events and processes through geographic contextualization for interpretation and understanding. It is a divide-and-conquer as well as disaggregate-and-aggregate approach to first zoom in to disassembling the composition and then finding ways to organizing them to expose hidden meanings. The main goal of this chapter is to communicate such a conceptual framework for space-time research in GIScience. The potential of Data Science, Big Data, or BigSpatial research is much enhanced with emphases on making the connection between data and what the data represent as elements or in a structure.
Notes
- 1.
The issue is referred to as Geohash faultlines. Algorithms have been developed to address the faultline issues in spatial search. One algorithm with its source code is available at http://code.google.com/p/geohash-fcdemo/
- 2.
The issue can be solved with the fault line algorithm. Its source code is available at http://code.google.com/p/geohash-fcdemo/
References
Andrienko, N., & Andrienko, G. (2011). Spatial generalization and aggregation of massive movement data. IEEE Transactions on Visualization and Computer Graphics, 17(2), 205–219.
Balkic, Z., Sostaric, D., & Horvat, G. (2012). GeoHash and UUID identifier for multi-agent systems. Lecture Notes in Computer Science, 7327, 290–298.
Beckers, B., & Beckers, P. (2012). A general rule for disk and hemisphere partition into equal-area cells. Computational Geometry, 45(7), 275–283.
Berry, M. J. A., & Linoff, G. (1997). Data mining techniques – For marketing, sales and customer support. New York: Wiley.
Böhm, C., Feng, J., He, X., Mai, S. T., Plant, C., & Shao, J. (2011). A novel similarity measure for fiber clustering using longest common subsequence. Paper presented at the proceedings of the 2011 workshop on data mining for medicine and healthcare, San Diego, CA, USA.
Dodge, S., Weibel, R., & Lautenschütz, A.-K. (2008). Towards a taxonomy of movement patterns. Information Visualization, 7, 240–252.
Dodge, S., Weibel, R., & Forootan, E. (2009). Revealing the physics of movement: Comparing the similarity of movement characteristics of different types of moving objects. Computers, Environment and Urban Systems, 33(6), 419–434.
Dodge, S., Laube, P., & Weibel, R. (2012). Movement similarity assessment using symbolic representation of trajectories. [Article]. International Journal of Geographical Information Science, 26(9), 1563–1588. doi:10.1080/13658816.2011.630003.
Dutton, G. (2000). Universal geospatial data exchange via global hierarchical coordinates. Paper presented at the international conference on discrete global grids, Santa Barbara, CA.
Eagle, N., & Pentland, A. (2006). Reality mining: Sensing complex social systems. Personal and Ubiquitous Computing, 10(4), 255–268.
Eagle, N., & Pentland, A. (2009). Eigenbehaviors: Identifying structure in routine. Behavioral Ecology and Sociobiology, 63(7), 1057–1066.
Gaffney, S., & Smyth, P. (1999). Trajectory clustering with mixtures of regression models. In Proceedings of 5th ACM SIGKDD international conference on knowledge discovery and data mining, San Diego, CA, 1999 (pp. 63–72). New York, NY, USA: ACM.
Gaffney, S., Robertson, A., Smyth, P., Camargo, S., & Ghil, M. (2007). Probabilistic clustering of extratropical cyclones using regression mixture models. Climate Dynamics, 29(4), 423–440.
Geohash. (n.d.). In Wikipedia. http://en.wikipedia.org/wiki/Geohash. Accessed 17 Dec 2012.
Giannotti, F., & Pedreschi, D. (2007). Mobility, data mining, and privacy: Geographic knowledge discovery. Berlin/Heidelberg: Springer.
Guo, D., Liu, S., & Jin, H. (2010). A graph-based approach to vehicle trajectory analysis. Journal of Location Based Services, 4(3), 183–199.
Hägerstraand, T. (1970). What about people in regional science? Papers in Regional Science, 24(1), 7–24. doi:10.1111/j.1435-5597.1970.tb01464.x.
Janelle, D. G. (Ed.). (1995). Metropolitan expansion, telecommuting, and transportation (The geography of urban transportation 2nd ed.). New York: Guilford Press.
Kwan, M.-P. (2004). GIS methods in time-geographic research: Geocomputation and geovisualization of human activity patterns. [Article]. Geografiska Annaler: Series B, Human Geography, 86(4), 267–280. doi:10.1111/j.0435-3684.2004.00167.x.
Laube, P., Dennis, T., Forer, P., & Walker, M. (2007). Movement beyond the snapshot: Dynamic analysis of geospatial lifelines. Computers, Environment and Urban Systems, 31, 481–501.
Lavalle, S., Lesser, E., Shockley, R., Hopkins, M. S., & Kruschwitz, N. (2011). Big data, analytics and the path from insights to value. MIT Sloan Management Review, 52(2), 21–32.
Lee, J.-G., Han, J., & Whang, K.-Y. (2007). Trajectory clustering: A partition-and-group framework. Paper presented at the Proceedings of the 2007 ACM SIGMOD international conference on management of data, Beijing, China.
Li, L., & Goodchild, M. (2012). Automatically and accurately matching objects in geospatial datasets. Advances in Geo-Spatial Information Science, 10, 71.
Li, H., Guo, C., & Qiu, W. (2011). Similarity measure based on piecewise linear approximation and derivative dynamic time warping for time series mining. Expert Systems with Applications, 38(12), 14732–14743. http://dx.doi.org/10.1016/j.eswa.2011.05.007
Long, J. A., & Nelson, T. A. (2012). A review of quantitative methods for movement data. International Journal of Geographical Information Science, 27(2), 292–318. doi:10.1080/13658816.2012.682578.
Lu, N., Cheng, C., Ma, H., & Yang, Y. (2012). Global discrete grid systems analysis and comparison. In Geoscience and remote sensing symposium (IGARSS), 2012 IEEE International, 22–27 July 2012 (pp. 2771–2774). New York, NY, USA: IEEE.
Marek, K. (2011). Chapter 1: Web analytics overview. Library Technology Reports, 47(5), 5–10.
Miller, H. J., & Bridwell, S. A. (2009). A field-based theory for time geography. Annals of the Association of American Geographers, 99(1), 49–75.
Morrill, R. (2005). Hägerstrand and the ‘quantitative revolution’: A personal appreciation. Progress in Human Geography, 29(3), 333–336.
Palma, A. T., Bogorny, V., Kuijpers, B., & Alvares, L. O. (2008). A clustering-based approach for discovering interesting places in trajectories. Paper presented at the Proceedings of the 2008 ACM symposium on applied computing, Fortaleza, Ceara, Brazil.
Panagiotakis, C., Pelekis, N., Kopanakis, I., Ramasso, E., & Theodoridis, Y. (2012). Segmentation and sampling of moving object trajectories based on representativeness. IEEE Transactions on Knowledge and Data Engineering, 24(7), 1328–1343.
Patterson, D. J., Liao, L., Fox, D., & Kautz, H. (2003, January). Inferring high-level behavior from low-level sensors. In UbiComp 2003: Ubiquitous computing (pp. 73–89). Berlin/Heidelberg: Springer.
Popa, M. C., Rothkrantz, L. J. M., Shan, C., Gritti, T., & Wiggers, P. (2012). Semantic assessment of shopping behavior using trajectories, shopping related actions, and context information. [Short Communication]. Pattern Recognition Letters, Online Preprint. doi:10.1016/j.patrec.2012.04.015.
Shaw, S.-L., & Yu, H. (2009). A GIS-based time-geographic approach of studying individual activities and interactions in a hybrid physical–virtual space. Journal of Transport Geography, 17(2), 141–149.
Shen, Z., & Ma, K.-L. (2008). MobiVis: A visualization system for exploring mobile data. In Visualization symposium, 2008. PacificVIS’08. IEEE Pacific, 5–7 March 2008 (pp. 175–182). New York: IEEE Geoscience and Remote Sensing Society.
Shen, Z., Ma, K.-L., & Eliassi-Rad, T. (2006). Visual analysis of large heterogeneous social networks by semantic and structural abstraction. IEEE Transactions on Visualization and Computer Graphics, 12(6), 1427–1439.
Shmueli, G., & Koppius, O. R. (2011). Predictive analytics in information systems research [Article]. MIS Quarterly, 35(3), 553–572.
Spaccapietra, S., Parent, C., Damiani, M. L., de Macedo, J. A., Porto, F., & Vangenot, C. (2008). A conceptual view on trajectories. Data & Knowledge Engineering, 65(1), 126–146.
Tong, X., Ben, J., & Wang, Y. (2010). A new effective hexagonal discrete global grid system: Hexagonal quad balanced structure. In 2010 18th international conference on geoinformatics, 18–20 June 2010 (pp. 1–6). New York: IEEE Geoscience and Remote Sensing Society.
Wagner, E. P. (2012). Data changes everything: Delivering on the promise of learning analytics in higher education [Article]. Educause Review, 47(4), 32.
Willems, N., van de Wetering, H., & van Wijk, J. J. (2009). Visualization of vessel movements. IEEE VGTC Symposium on Visualization, 28(3), 959–966.
Yan, Z., Giatrakos, N., Katsikaros, V., Pelekis, N., & Theodoridis, Y. (2011, August). SeTraStream: Semantic-aware trajectory construction over streaming movement data. Paper presented at the 12th international symposium on spatial and temporal databases (SSTD), Minneapolis, MN, USA.
Yan, Z., Chakraborty, D., Parent, C., Spaccapietra, S., & Aberer, K. (2012). Semantic trajectories: Mobility data computation and annotation. ACM Transactions on Intelligent Systems and Technology (TIST), 9(4), 1–34, Article 39.
Acknowledgment
The research was in part supported by Award #2010-DE-BX-K005, awarded by the National Institute of Justice, Office of Justice Programs, U.S. Department of Justice. The opinions, findings, and conclusions or recommendations expressed in this publication are those of the authors and do not necessarily reflect those of the Department of Justice. NIJ defines publications as any planned, written, visual or sound material substantively based on the project, formally prepared by the award recipient for dissemination to the public.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer Science+Business Media Dordrecht.
About this chapter
Cite this chapter
Yuan, M., Nara, A. (2015). Space-Time Analytics of Tracks for the Understanding of Patterns of Life. In: Kwan, MP., Richardson, D., Wang, D., Zhou, C. (eds) Space-Time Integration in Geography and GIScience. Springer, Dordrecht. https://doi.org/10.1007/978-94-017-9205-9_20
Download citation
DOI: https://doi.org/10.1007/978-94-017-9205-9_20
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-017-9204-2
Online ISBN: 978-94-017-9205-9
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)