
Abstract
Propulsive advantage in a three side-by-side (one above the other) arrangement as compared to single/isolated fish-like locomotion of a flexible hydrofoil is studied. A level set based immersed boundary method (LSIBM) is used for a transient 2D CFD simulation and analysis of hydrodynamics of fish like locomotion; modeled here by undulating NACA0012 hydrofoil. The study is undertaken for both antiphase and in-phase undulation (of the middle as compared to side foils) for various frequency (St = 0.4, 0.6 and 0.8) and gap ratios (d = 0.4, 0.6, 0.8 and 1), at a constant amplitude (Amax = 0.1), wavelength (λ = 1) and Reynolds number (Re = 400). Anti-phase as compared to in-phase undulation is found to give better propulsive performance. For side as well as middle hydrofoil, effect of frequency as compared to hydrofoil-spacing is found to be more dominant on the propulsive performance. Signature of thrust is shown with the help of momentum excess and reverse Von-Karman Street.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In nature, we find numerous examples of efficient bodies moving in a fluid. Fish are smart swimmers which use jet-stream propulsion; thereby, achieving higher propulsive efficiency as compared to manmade machines. Thus, fish like locomotion or fish propulsion has been an area of great interest and detailed investigation, with applications in Autonomous Underwater Vehicles (AUVs).
Mostly, hydrodynamics of fish like locomotion has been studied numerically. Zhu et al. [1] simulated robotuna and giant danio. Gilmanov and Sotiropoulos [2] used immersed boundary method to simulate shape obtained from measurements of real mackerel fish. Liu et al. [3, 4] simulated tadpole movement (at Re of 3000 and 7200) and concluded that tadpole appears to be inefficient—due to its shape—but its propulsive efficiency was as high as some teleost fishes. Jian et al. [5] simulated fish-like locomotion (using NACA hydrofoil)—using immersed boundary method—at a Reynolds number of 500, oscillating amplitude of 0.2 and Strouhal number of 0.2−1. Dong and Lu [6] simulated undulating hydrofoil at Reynolds number of 5000, to study flow over single as well as multiple side-by-side hydrofoils. Looking into earlier work it is observed that work on multiple undulating foils is scanty.
After presenting the hydrodynamics of fish-like locomotion for single flexible hydrofoil [7], the objective of the present work is to study hydrodynamics of two hydrofoils in side-by-side arrangement, for various values of governing parameters.
2 Physical Description of the Problem
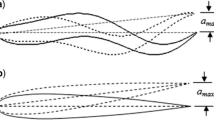
Two-dimensional simulations and analysis of fish like locomotion are done for flow generated by translating (with a velocity u ∞ ) and undulating fish-like body—modeled as NACA 0012 hydrofoil. Computational domain and boundary conditions hydrodynamics of translating and undulating three hydrofoils—in side-by-side arrangement—are shown in Fig. 1. The velocity (u ∞ ) and chord length of the hydrofoil (c) are taken as non-dimensional velocity and length scale, respectively.

Schematic of the domain and the boundary conditions for three a in-phase and b anti-phase undulating hydrofoils in side-by-side arrangement
The figure shows an initial wavy-shape—similar to the shape of a fish like body during onset of locomotion—which is obtained by applying a chord-wise varying transverse undulation to the hydrofoil [7]. The initial wavy shape of the foils are undulated using linear form of equation (MHLM), which corresponds to largest thrust coefficient as compared to other types of undulations [7]. In this motion, head and tail of hydrofoil oscillates with amplitude of 0.02 and 0.1, respectively. The figure shows both in-phase and anti-phase undulation of the middle as compared to side foil, represented by solid and dotted lines, respectively.
3 Numerical Methodology
In present work a novel level set based immersed boundary method (LSIBM) for moving boundaries [8] is used. Level set is defined in such a way that it remains negative inside the flexible hydrofoil, positive in fluid and zero at the fluid-solid interface. Level set field captures the temporal evolution/undulation of the shape of the flexible hydrofoil. It also helps in the proper implementation of conservation laws (for the partially filled solid/fluid control-volumes) as well as boundary conditions (at the solid-fluid interface). The Navier-Stokes equations are solved in the fluid region of the computational domain; whereas, the level-set equations are solved in both the solid and fluid regions. In the LSIBM, a fully implicit pressure projection method is used on a co-located fixed Cartesian grid. For the momentum equations, diffusion terms are solved by central difference and advection term by QUICK scheme. The level set equations are discretized by 3rd order Runge-Kutta scheme for temporal term and 5th order upwind WENO (weighted essentially non-oscillatory scheme) scheme for spatial terms.
A non-uniform Cartesian grid of 736 × 708 is found sufficient after a grid independence study; and is used in the present work. A constant time step of ∆t = 0.003 is used in the present simulations.
4 Parametric Details
Parametric study is done here for various non-dimensional governing parameters as follows:
-
Frequency of all the hydrofoils: St = 0.4, 0.6 and 0.8.
-
Phase-Difference for the undulation of side as compared to middle hydrofoil: 0° (in-phase; IP) and 180° (anti-phase; AP).
-
Hydrofoil-spacing: d = 0.4, 0.6, 0.8 and 1.
The study is done for a constant value of amplitude A max = 0.1 and wavelength λ = 1 of undulation; and Reynolds number Re = 400. The above non-dimensional frequency are chosen to cover both drag and thrust producing regimes; and the values of parameters are chosen to keep it close to that observed in nature with fishes.
5 Effect of Governing Parameters on Engineering Parameters
For in-phase undulation, with decreasing hydrofoil-spacing, Fig. 2a1−c1 shows a monotonic increase in drag for St = 0.4 and decrease in thrust for St = 0.6 and 0.8; with a smaller drag and larger thrust for the side as compared to middle hydrofoil at the respective values of St. As compared to flow across a single hydrofoil, the increased interaction of flow behind the two hydrofoils with decreasing spacing leads to decrease in the thrust production. However, the disadvantage seems to be more for middle as compared to side hydrofoil.

Variation of time averaged a−c thrust coefficient and d, e propulsive efficiency of the in-phase and anti-phase undulating middle and side foil, with increasing foil spacing for various undulation frequency, at Re = 400, λ = 1 and A max = 0.1. The result for single foil is also shown
For anti-phase undulation, with decreasing hydrofoil-spacing, Fig. 2a2−c2 shows a monotonic decrease in drag for St = 0.4 and increase in thrust for St = 0.6 and 0.8; for side hydrofoil. Whereas, for middle hydrofoil, there is a decreasing followed by an increasing trend for thrust and vice versa for drag at the respective St. As compared to flow across a single hydrofoil, the increased interaction of flow—behind the two hydrofoils—with decreasing spacing leads to increase in the thrust production at all spacing for side and at larger/smaller spacing for middle hydrofoil. However, the advantage seems to be more for side as compared to middle hydrofoil. The larger thrust needed for the middle to match that of side hydrofoil—to maintain the configuration—may be obtained if the middle hydrofoil undulates at a larger frequency. Thus, middle hydrofoil probably needs more energy to maintain the group in side-by-side arrangement. For both the types of undulation, Fig. 2 shows that the propulsive efficiency decreases with decreasing hydrofoil-spacing; with a larger efficiency for side as compared to middle hydrofoil at a constant spacing. As compared to single hydrofoil, Fig. 2d1, d2 shows efficiency is more at larger and less for smaller spacing; for middle as well as side hydrofoils at St = 0.6. Whereas, at St = 0.8, the efficiency is less for both the hydrofoils at all the spacing. However, the increase (decrease) in efficiency of three as compared to single hydrofoil is more for side (middle) hydrofoil.
For side as well as for middle hydrofoil a larger thrust coefficient as well as efficiency for anti-phase as compared to in-phase undulation is observed. Thus, anti-phase as compared to in-phase undulation provides better propulsive mechanism—for transportation of input energy required for undulation—leading to the fish like locomotion of three hydrofoils in side-by-side arrangement. Also anti-phase as compared to in-phase gives better performance for the three side-by-side as compared to single hydrofoil, at larger spacing and frequency of undulation close to 0.6.
6 Effect of Undulation Frequency on Flow Patterns
Figure 3 for in-phase and Fig. 4 for anti-phase undulation shows instantaneous vorticity, velocity and pressure contour, at the smallest hydrofoil-spacing studied here. The patterns are presented at a time-instant corresponding to the maximum in the temporal variation of thrust coefficient of the middle foil.

Instantaneous contour of a1−c1 vorticity, a2−c2 streamwise velocity and a3−c3 pressure, for various frequency of undulation at foil-spacing of 0.4, Re = 400, λ = 1 and Amax = 0.1; for in-phase undulation of middle as compared to side foil. The time instant for the figures corresponds to maximum thrust produced by middle hydrofoil

Instantaneous contour of a1−c1 vorticity, a2−c2 streamwise velocity and a3−c3 pressure, for various frequency of undulation at foil-spacing of 0.4, Re = 400, λ = 1 and Amax = 0.1; for anti-phase undulation of middle as compared to side foil. The time instant for the figures corresponds to maximum thrust produced by middle hydrofoil
A non-interacting wake/jet can be seen for the in-phase undulation; vice versa for anti-phase undulation. Strength of the shed-vortex as well as stream-wise momentum is seen as larger for anti-phase as compared to in-phase undulation. For both the types of undulation, with increasing St for both the hydrofoils, the figures shows an increase in intensity/strength as well as size of the shed vortices, streamwise momentum behind the hydrofoil. Thrust producing positive pressure zone at the tail (of both hydrofoils) can be seen in the figure which increases with increasing St.
For lower as compared to higher frequency of undulation, both the figures shows a transition from forward to reverse Von-Karman street (in vorticity contour), from streamwise momentum deficit to excess (in velocity contour) behind each foil; providing the change in the signature of flow patterns for a transition from drag to thrust producing regime.
For the streamwise velocity contour, it is interesting to see a difference in the velocity pattern—in-between the middle and side foils (gap)—for in-phase as compared to anti-phase undulation. For anti-phase undulation, Fig. 4a2−c2 shows that the velocity in the bottom gap (between bottom and middle foil) is large on the front and smaller in the rear portion of the gap; vice versa for the top gap (between the top and middle foils). Whereas for in-phase undulation, Fig. 3a2−c2 show much smaller change in the streamwise velocity in the top as well as bottom gaps. This needs further investigation to explore the effect of the flow pattern on the propulsive performance parameters.
7 Concluding Remarks
An in-house code with Level Set based Immersed Boundary Method (LSIBM) is employed for simulating fish like locomotion of three undulating hydrofoils (NACA0012) in side-by-side arrangement. Parametric study is done for various frequencies (St = 0.4, 0.6, and 0.8) and distance (d = 0.4, 0.6, 0.8 and 1) between adjacent hydrofoils at Amax = 0.1, λ = 1 and Re = 400. Simulations were done for two types of phase difference: in-phase motion and anti-phase; between the undulation of middle as compared to side foils. Conclusions drawn from the present work are as follows:
-
1.
Propulsive performance of anti-phase as compared to in-phase undulation is better for side as well as middle hydrofoil. Furthermore, side as compared to middle hydrofoil gives better propulsive performance for both the types of undulation.
-
2.
Thrust coefficient varies more substantially—with increasing hydrofoil-spacing—for in-phase as compared to anti-phase undulation. However, its values are larger for anti-phase as compared to in-phase undulation; and for side as compared to middle foil.
-
3.
Propulsive efficiency increases with increasing foil-spacing, at a constant undulation frequency, for both in-phase and anti-phase undulation of the foils. The efficiency for the three side-by-side as compared to single foil is less; except at larger spacing for St = 0.6. The efficiency of side as compared to middle foil is more.
-
4.
For side as well as middle hydrofoil, effect of frequency as compared to hydrofoil-spacing is found to be more dominant on the propulsive performance. With increasing frequency, thrust as well as efficiency increases for in-phase as well as anti-phase undulation; except with a decrease in efficiency of middle hydrofoil for anti-phase undulation. With decreasing spacing, thrust increases for anti-phase and decreases for in-phase undulation; and efficiency decreases for both the types of undulations.
-
5.
For side as compared to single hydrofoil, larger thrust for anti-phase and smaller thrust for in-phase undulation are shown with almost same propulsive efficiency. Moreover, for anti-phase undulation, a critical undulation frequency Stc is observed (such that the efficiency is enhanced for St < Stc and reduced for St > Stc) for a constant d. With decreasing d, it is found that Stc decreases; although the thrust coefficient increases monotonically. Thus, for anti-phase undulating side as compared to single hydrofoil, enhancement in thrust occurs with an efficiency which is enhanced at larger and reduced at smaller d; however, the thrust enhancement is more at larger as compared to smaller d.
-
6.
Signatures of thrust production for the group of undulating foils is shown as reverse Von Karman street and streamwise momentum excess (jet flow) behind the foils, at larger values of frequency of undulation. The effect of flow structure of the propulsive performance will be studied in future.
References
Zhu, Q., Wolfgang, M.J., Yue, D.K.P., Triantafyllou, M.S.: Three-dimensional flow structures and vorticity control in fish-like swimming. J. Fluid Mech. 468, 1–28 (2002)
Gilmanov, A., Sotiropoulos, F.: A hybrid cartesian/immersed boundary method for simulating flows with 3D, geometrically complex, moving bodies. J. Comput. Phys. 207, 457–492 (2005)
Liu, H., Wassersug, R.J., Kawachi, K.: A computational fluid dynamics study of tadpole swimming. J. Exp. Biol. 199, 1245–1260 (1996)
Liu, H., Wassersug, R.J., Kawachi, K.: The three dimensional hydrodynamics of tadpole swimming. J. Exp. Biol. 200, 2807–2819 (1997)
Jian, D., Xue-ming, S., An-lu, R.: Numerical study on propulsive performance of fish-like swimming foils. J. Hydrodyn. Ser. B 18(6), 681–687 (2006)
Dong, G.J., Lu, X.Y.: Characteristics of flow over traveling wavy foils in a side-by-side arrangement. Phys. Fluids 19, 057107 (2007)
Shrivastava, M., Agrawal, A., Sharma, A.: CFD study on hydrodynamics of fish-like undulating foil using a novel level-set based immersed boundary method. In: Proceedings of the 40th National Conference on Fluid Mechanics and Fluid Power, NIT Hamirpur (2013)
Shrivastava, M., Agrawal, A., Sharma, A.: A Novel level set-based immersed-boundary method for CFD simulation of moving-boundary problems. Numer. Heat Transfer, Part B 63, 304–326 (2013)
Acknowledgment
The present work is part of a research project funded by the Department of Science and Technology, New Delhi under project No. SR/S3/MERC/040/2009; the financial support is acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer India
About this paper
Cite this paper
Mukul Shrivastava, Malhar Malushte, Amit Agrawal, Atul Sharma (2017). CFD Study on Hydrodynamics of Three Fish-Like Undulating Hydrofoils in Side-by-Side Arrangement. In: Saha, A., Das, D., Srivastava, R., Panigrahi, P., Muralidhar, K. (eds) Fluid Mechanics and Fluid Power – Contemporary Research. Lecture Notes in Mechanical Engineering. Springer, New Delhi. https://doi.org/10.1007/978-81-322-2743-4_138
Download citation
DOI: https://doi.org/10.1007/978-81-322-2743-4_138
Published:
Publisher Name: Springer, New Delhi
Print ISBN: 978-81-322-2741-0
Online ISBN: 978-81-322-2743-4
eBook Packages: EngineeringEngineering (R0)