
Abstract
Wireless Sensor Networks (WSNs) have a plethora of modern applications in our world and are also very promising and suitable for future applications. Critical issues such as clustering, organization, event scheduling (for transmitting and receiving), power consumption, routing, time response, etc., have been studied and analyzed in the literature. It is common knowledge that the most critical issue is the adaptation of the WSN in the real needs and dynamically changing environment. Despite the existing studies, the above issue has not been studied in depth. In a real WSN application the mote role, event scheduling, network clustering, and decision support are changing in a dynamically adapted manner. To this end, in this paper, a novel modeling approach based on the multi-agent technology is presented. Moreover, the proposed approach is focused on scheduling policy for achieving low power consumption.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction—WSN Critical Issues
There is no doubt that sensor networks have a plethora of practical applications [1, 2] for solving single or complex problems where multiple events take place and a rapid system response is needed. On the other hand, the physical field under the dynamic conditions where the WSN will be installed introduces critical issues such as the energy consumption and WSN configuration.
Energy consumption is affected by various factors such as network topology, routing decisions, communication schemes, system response, event occurrences, etc. The most common communication scheme for each node is the assignment of fixed time slots for transmitting and receiving data to/from other WSN nodes. Node energy is saved while a node is in sleep mode (no transmitting or receiving). Time is divided in fixed slots where each node has a specific time frame to transmit or receive. This technique is called Time Division Multiplexing (TDM). Based on the TDM [3], a scheduling mechanism must be applied in order to avoid collisions and, on the other hand to reduce power consumption by wasting time with useless transmissions.
Channel allocation constitutes another critical issue due to the fact that the channel space is limited. The above issue has not been studied in depth in the literature. Additionally, channel allocation and scheduling policy have to be well combined for reducing drawback factors for the WNS such as:
-
Only a limited number of nonoverlapping channels exist.
-
Co-channel interference cause transmission problems.
-
WSN nodes receive more than one packet (from individual sources).
-
Energy is wasted while nodes are in the idle listening period.
-
Overhearing where a node receives wrong packets (different destinations).
-
Redundant data.
-
Packet loss when the receiver is not ready.
The above issues become more critical regarding the established WSN topology where the tree, cluster, and hybrid constitute the possible approaches.
Despite the plethora of studies in the literature in the field of WSN scheduling and multi-agents, only few studies present how the multi-agent characteristics and real capabilities will be used for modeling WSNs. There is also a lack of formal analysis regarding fundamental multi-agent issues and many proposed solutions are specialized in specific applications. Moreover, there is also a lack of generalized practical implementations based on the multi-agent concepts regarding the scheduling policy.
In this paper, a preliminary novel modeling approach based on the multi-agent technology is presented. Moreover, the proposed approach is focused on scheduling policy for achieving low power consumption, faster mote response, and availability.
2 WSN Scheduling
Although there are many scheduling protocols, none has been adopted as a standard in the literature [3]. With no standardization in time scheduling, a new dynamic scheduling approach must be applied for the real-time adaptation of the WSN to current conditions.
According to scheduling idea the time space is divided in slots which have equal duration. A number of time slots are assigned to each node and every slot is used for a specific purpose. For example, the sleep mode is used for energy saving while other nodes are transmitting. Based on the corresponding TDMA protocol each node transmits, receives or sleeps. These actions have to be synchronized between nodes for guarantee the needed operation of the WSN.
2.1 TDMA Protocols
TDMA protocols in the literature try to optimize the time utilization by the WSN nodes in terms of energy consumption, responsiveness, routing, etc. Based on the above constraints, new critical issues, such as synchronization, time slot assignment, etc. have been emerged.
The proposed TDMA protocols in the literature try to solve common WSN issues based on an effective time scheduling manipulation. Issues such as sleep time manipulation with a corresponding energy-efficient wake-up [4], Co-channel interference which causes redundant retransmissions [5], slot reusability [6], traffic adaptive scheduling [7], etc. are faced by a number of protocols but no one (as a single protocol) can effectively solve the majority of the known issues in WSNs.
3 Multi-agent Technology (MAT)
3.1 Basic Concepts
Multi-agent technology (MAT) constitutes a quite old approach for modeling dynamic and/or complex systems but only few studies take in account the agent characteristics and exploit the real capabilities.
An agent can be defined as an autonomous computational system that works for specific and predefined goals [8]. Moreover, an agent interacts with the surrounding environment and acts on it. The most known and important attributes of an agent are:
-
Adaptability (agent change according to external or internal events)
-
Autonomy (control of its own actions)
-
Collaboration (with other agents for achieving common goals)
-
Interactivity (with surrounding environment)
A multi-agent system (MAS) consists of a number of agents which interact through communication.
These agents act in an environment within which they have different areas of influence (Fig. 1). Within the environment many influence areas may coincide. MASs can be viewed as a loosely coupled network of problem-solver entities that collaborate together with the common goal to solve the whole complex problem beyond the solving capabilities of each individual entity. Agent technology has been also used in the management of telecommunication systems.

Multi agent environment
3.2 Multi-agents in WSNs (Existing Approaches)
Based on literature analysis [3–7, 9–22], several key points have to be stated:
-
No application analysis. Only few studies present how the multi-agent characteristics and real capabilities will be used for modeling WSNs.
-
Lack of formal analysis. There is also a lack of formal analysis regarding fundamental multi-agent issues such as decision support, negotiation, interaction, autonomy, etc. In [19], the proposed approaches are well analyzed and defined regarding some of the fundamental multi-agent concepts.
-
Too specialized solutions. Other studies present significant applications [20–22] but the proposed approaches are too specialized in specific fields. Thus, no generalization can be achieved.
-
Lack of generalized practical implementations based on the multi-agent concepts.
-
Dynamic scheduling is crucial. It is well known that the time scheduling affects directly the power consumption which is a very critical factor for the WSNs. There is a lack in the literature regarding dynamic scheduling based on the MAT. MAT may offer real-time scheduling manipulation achieving higher WSN adaptation to current conditions.
4 Modeling WSNs Using MAT (A Preliminary Analysis)
The MAS technology has sense and produces the desired results only in cases where the multi-agent concept can be applied and the agent features [23] such as adaptability, autonomy, collaboration, interactivity, etc. are used in practice. In other words Agent technology must be applied not only where the agent characteristics have sense but also where these characteristics improve the whole system performance which is valuated through selected metrics.
4.1 Why MAT for Modeling WSNs?
A WSN has some characteristics that must be faced in a dynamically manner and make hard the network management in terms of energy consumption, routing, and time response.
These characteristics can be presented in comparison with the existing approaches. The key issues of applying the MAT concept are the adaptation of the WSN to current management needs based on advanced decision support strategies.
When the MAT is applied properly, several characteristics of the WSN can be face differently:
-
(1)
Dynamic adaptation to environment conditions. Each node acts autonomously and adapts its behavior to current needs such as the sampling rate, data processing, communication, etc.
-
(2)
Dynamic node role. A sensor node can works as sink, single node, gateway, or backup node. The node or team role can be changed (updated) according to current needs. If the energy of the sink node is low then a different node is used as a sink. The new sink node may belong to a different cluster and is accessed via a gateway node (Fig. 2).
Fig. 2 
WSN node role adaptation
-
(3)
Self/overall goal. Each node has a well-defined goal within the cluster. This goal has to be adapted to cluster and system overall goals.
-
(4)
Dynamic scheduling. In existing approaches the TDM scheduling is based on fixed algorithms that exploit the assigned time slots in every node. In a real environment the scheduling strategy must be dynamically adapted to current conditions. The scheduling priority management can cause minimization of energy consumption, faster node response, etc. Figure 3 shows the difference in time slot assignments in real time where dynamic priorities are applied. In Fig. 3 the corresponding scheduling priority is changed for nodes 1 and 2. In phase 1, node 1 has higher priority than node 2, and thus transmits bigger packets. Due to current conditions the data of node 2 are critical for the whole system and must be transmitted as soon as possible. Thus, the corresponding scheduling priority is changed between the involved nodes.
Fig. 3 
Scheduling


-
Dynamic clustering. Based on current conditions dynamic clustering may be needed. When dynamic clustering is applied new members can be added in an existing cluster or o whole cluster can be created using existing nodes (Fig. 4).
Fig. 4 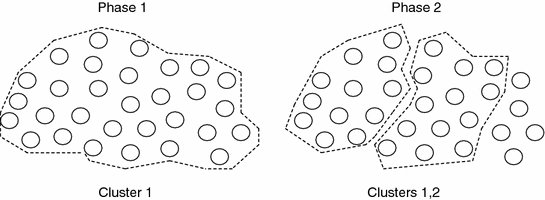
Dynamic clustering
-
Dynamic, fixed, and hybrid channel allocation. Channel allocation is not obvious in WSNs. Channel allocation must be performed dynamically based on CNIR measurements

When a real phenomenon take place in a different area (Fig. 5), then the WSN focus must be transferred (phase 1 to phase 2) using backup nodes as active (current active nodes become inactive-backup nodes). Moreover, when a great number of sensors are used (e.g., large-scale WSNs) channel allocation is also a very critical issue.

Adaptation to phenomenon occurrence
Channel allocation policy is not obvious especially when dynamic real-time phenomenon take place. Thus, an intelligent real-time dynamic channel allocation is needed.
4.2 MAT Adapted to WSN
The whole proposed model is based on the multi-agent technology (MAT) for adapting the supported WSN operations to current conditions. This adaptation is achieved through the exploitation of the MAT features for modeling the WSN. From now on each WSN node is called Agent Sensor Node (ASN).
4.2.1 Modeling the Basic ASN
For any WSN, the node is the fundamental element. Thus, the first step is to design the corresponding node model (Fig. 6).

Basic node model
Each node takes measurements from its environment and interacts with the rest WSN (requests, responses). Each node transmission is based on scheduling activity or alert. More precisely, transmission includes requests, responses, data, alerts at random time, or scheduled events.
An ASN consists of well-defined modules such as:
-
Problem solver. Supports all ASN services (core module).
-
Execution. Agent code activation.
-
Communication. Exchange information with other ASN (e.g., single ASN, sink).
-
Control. Controls the internal module interaction.
-
Negotiation module. Supports negotiation with other ASNs
4.2.2 Event-Based Node Model
During the node operation various events are occurred (internal or external). The event list is critical due to the fact that the node operation is based on these events (environment and WSN events). Figure 7 shows the event-based model.

Event-based model
Table 1 shows the basic WSN events categorized as internals or externals.
Based on the above fundamental models, the corresponding agent-based model will be derived. Additionally, the multi-agent modeling will specify formally the corresponding events that initially have been presented in Table 1.
Table 2 illustrates clearly the dynamic characteristics of the proposed approach.
4.2.3 WSN Behavioral Modeling for Dynamic Scheduling
Each network node will act autonomously for achieving self goals. Additionally, network nodes contribute to overall system goals. Thus, decision support must be implemented in each node based on well-defined rules. Moreover, negotiation between nodes for achieving system adaptation to current needs and conditions is also needed.
In order to describe and implement the WSN behavior, a formal modeling must be performed as first step. In the presented analysis it is assumed that the node behavior affects the scheduling policy of the cluster.
For a MAT-based modeling specific metrics must be adapted for measuring the resulting WSN performance. Multi-agent self behavior, agent interaction, and agent negotiation constitute key issues for the new model.
Each node decides for its behavior based on current-self performance.
A number of metrics (power based or response based) can be used at node or cluster level such as:
-
Average sleep period (ASP). Larger sleep period means lower power consumption.
-
Miss ratio (MR). Fail ratio in communication.
-
Percentage of retransmissions per packet (RP). Packet retransmission means higher power consumption and higher network congestion.
-
Transmission delay (TD). The needed time for a complete transmission.
All the above metrics are applied at ASN or cluster level (Fig. 8).

Cluster and self metrics
For the first modeling attempt, the ASP and RP will be used.
Based on the above selected metrics it is assumed that the possible discrete states of the of the WSN (node or cluster level) can be described by the set E as
The pair members of the set E represent the level (performance) of ASP and RP metric, respectively (L = LOW, H = HIGH).
On the other hand, each ASN has a set of possible actions (A C ) on the WSN environment.
where IP is the action “Increase Priority,” DP represents the action “Decrease Priority” and DN is the action “Do nothing” for the nth ASN. The key issue for controlling the resulting performance is the scheduling priority of each ASN. Thus, each ASN acts autonomously for achieving better self-performance.
The above actions are requests to the main cluster node (when the centralized control is applied) or to other ASNs (distributed control) based on the applied negotiation scheme for rearranging the time slots within the scheduling sequence.
The environment changes its state (performance) based on the above actions. A sequence of actions causes a sequence of state changes. Thus, a run, r, of an ASN is in the above agent run, the WSN performance regarding the metrics ASP and RP is high (H) and high (H). The scheduling priority of a specific ASN is increased and at the same time the priority of another ASN is decreased. These actions change the RP status to the lower level. Finally, another action restricts both ASP and RP to a lower level.
Based on the above approach, the performance levels can be analyzed to more representative values.
4.2.4 ASN Interaction
ASNs, percept environment (performance, real-time phenomenon, communication) and act on it. These two distinct activities (perception, action) are represented by two functions within the ASN (Fig. 9).

Environment perception
The function “SEE” maps environment (states) to perceptions and function “ACTION” maps percepts to actions. In current approach, the metrics ASP and RP have been chosen for evaluating performance. These metrics can be also expressed with the following subsets:
where S represents the statement “ASP is acceptable” and R represents the statement “RP is acceptable.” Table 3 shows the meaning of the subsets of E.
It also must be stated that expression (4) is equivalent to expression (1).
Let P 1 and P 2 indicate if the ASP metric is acceptable. Based on this assumption, the behavior of the “SEE” function can be described as:
with, \(e_{1} = \{ \overline{S} ,\,\overline{R} \} ,\,e_{2} = \{ \overline{S} ,\,R\} ,\,e_{3} = \{ S,\,\overline{R} \} ,\,e_{4} = \{ S,\,R\}\)
For the metric RP, the SEE (e) is as follows:
4.2.5 ASN Negotiation for Dynamic Adaptation to Current Needs
Each agent adapts its behavior to current environment conditions, collaborates with others and makes decisions autonomously.
As mentioned before, each ASN contains a negotiation module which supports negotiation with other ASNs based on well-defined rules.
Negotiation can be approached as centralized or distributed (Fig. 10). In centralized negotiation scheme, every single ASN negotiates with a central node and asks for scheduling priority rearrangement. After the ASN request arrival, the central node rearranges or not the current scheduling assignments. In distributed negotiation, an ASN negotiates with another ASN for mutual rearrangement of scheduling priorities.

Negotiation types
Figure 11 constitutes a synopsis of the ASN behavior regarding the corresponding metrics and negotiation approach. If current status of an ASN is critical (e.g., ASP or RP not acceptable or low power) then an attempt for finding another ASN for negotiation is performed. The negotiation is take place for mutual priority rearrangement (MPR) between the two ASNs. If the negotiation result is not acceptable then another attempt is performed for finding an available ASN (if any). Otherwise, if the negotiations are failed and no other ASN is available then the critical status flag is activated for this ASN. On the other hand, if the self status is not critical and current status is stable (as compared to previous) then the requests for MPR from other ASNs are accepted, otherwise MPR requests are also accepter under hard constraints.

ASN behavioral chart
5 Conclusions and Future Work
In this paper, a very clear modeling approach has been presented for adapting multi-agent technology in WSNs where the real conditions are changed in a dynamically manner. This preliminary analysis shows also that the multi-agent technology can contribute significantly in the field of WSNs where crucial characteristics such as power, time response, and real phenomenon are changing dynamically. It is also important to state that the multi-agent technology has sense if and only if all the requirements and specifications of agents are met as well as the practical improvement of the WSN when this approach is used.
The next step of this study is the practical and progressive implementation of a low cost WSN for studding in depth dynamic WSN characteristics such as dynamic roles, clustering, time scheduling manipulation, etc. Through this implementation, the capabilities, limitations, and other issues regarding the scheduling algorithms will be also investigated.
References
Akyildiz, I.F., et al.: Wireless sensor networks: a survey. Comput. Netw. 38, 393–422 (2002)
Yick, J., Mukherjee, B., Ghosal, D.: Wireless sensor network survey. Comput. Netw. 52, 2292–2330 (2008)
Kumar, S., Chauhan, S.: A survey on scheduling algorithms for wireless sensor networks. Int. J. Comput. Appl. (0975–8887). 20(5), 7–13 (2011)
Wu, Y., Li, X.-Y., Liu, Y., Lou, W.: Energy-efficient wake-up scheduling for data collection and aggregation. IEEE Trans. Parallel Distrib. Syst. 21(2), 275–287 (2010)
Yen, H.-H.. Lin, C.-L.: Integrated channel assignment and data aggregation routing problem in wireless sensor networks. In: IEEE Special Issue on Wireless Ad-Hoc Networks (2009)
Shi, L., Fapojuwo, A.O.: TDMA scheduling with optimized energy efficiency and minimum delay in clustered wireless sensor networks. IEEE Trans. Mob. Comput. 9(7), 927–939 (2009)
Rajendran, V., Obraczka, K., Garcia-Luna-Aceves, J.J.: Energy-efficient, collision-free medium access control for wireless sensor networks. In: Proceedungs of ACM SenSys 03, pp. 181–192. Los Angeles, CA (2003)
Papazoglou, P.M., Karras, D.A., Papademetriou. R.C.: On the efficient implementation of a high performance multi-agent simulation system for modeling cellular communications involving a novel event scheduling . Int. J. Simul. Syst. Sci. Technol. 10(1), 1–7 (2009) (Special Issue on Performance Engineering)
Guijarro, M., Fuentes-Fernández, R., Pajares, G.: A multi-agent system architecture for sensor networks. In: Multi-Agent Systems—Modeling, Control, Programming, Simulations and Applications. book chapter (2011). doi:10.5772/14309
Bendjima, M., Feham, M.: Intelligent wireless sensor network management based on a multi-agent system. Int. J. Comput. Sci. Telecommun. 3(2), 13–18 (2012)
Ovalle, D., Restrepo, D., Montoya, S.: Artificial intelligence for wireless sensor networks enhancement electrical and electronic engineering. In: Smart Wireless Sensor Networks (2011). doi: 10.5772/12962
Vinyals1, M., Rodriguez-Aguilar1, J.A., Cerquides, J.: A survey on sensor networks from a multiagent perspective. Comput. J. 54(3), 455–470 (2011)
Lee1, K., Kim, M.: Sensor management model using multi-agent in small-area sensor networks. In: LNAI 4078, pp. 222–230 (2009)
Xiong, F., Li B., Ferrese, F.: Multi-agent-based interoperable wireless sensor network model. In: IEEE SENSORS 2009 Conference
Piraveenan, M., et al.: Decentralized multi-agent clustering in scale-free sensor networks. Stud. Comput. Intell. (SCI) 115, 485–515 (2008)
Zhang, Y.-Y., et al.: An energy-efficient multi-agent based architecture in wireless sensor network. LNCS 4976, 124–129 (2008)
Macker, J.P., et al.: Multi-agent systems in mobile ad hoc networks. In: Proceeding of Military Communications Conference, 2005, MILCOM 2005. IEEE
O’Hare, G.M.P., et al.: Agents for wireless sensor network power management. In: Proceedings of International Workshop on. Wireless and Sensor Networks (WSNET-05) (2005)
Soh, L.-K., Tsatsoulis, C.: A real-time negotiation model and a multi-agent sensor network implementation. Auton. Agent. Multi-Agent Syst. 00, 1–56 (2005)
Sardis, E., Doulamis, A., Matsatsinis, N.: Sensor networks and multi-agents in industrial workflows. Int. J. Mach. Learn. Comput. 1(2), 205–212 (2011)
Sidek, O., Quadri, S.A., Kabir, S.: Multi agent system for agile wireless sensor network to monitor structures. In: Progress in Electromagnetics Research Symposium Proceedings, Marrakesh, Morocco, 20–23 Mar 2011
García, Ó., et al.: Wireless sensor networks and real-time locating systems to fight against maritime piracy. Special Issue on Distributed Computing and Artificial Intelligenc. Int. J. Artif. Intell. Interact. Multimedia 1(5), 14–21 (2012)
Papazoglou, P.M., Karras, D.A., Papademetriou, R.C.: An improved multi-agent simulation methodology for modeling and evaluating wireless communication systems resource allocation algorithms. J. Univ. Comput. Sci. 14(7), 1061–1079 (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer India
About this paper
Cite this paper
Papazoglou, P.M., Karras, D.A. (2016). A Conceptual Multi-agent Modeling of Dynamic Scheduling in Wireless Sensor Networks. In: Zeng, QA. (eds) Wireless Communications, Networking and Applications. Lecture Notes in Electrical Engineering, vol 348. Springer, New Delhi. https://doi.org/10.1007/978-81-322-2580-5_36
Download citation
DOI: https://doi.org/10.1007/978-81-322-2580-5_36
Published:
Publisher Name: Springer, New Delhi
Print ISBN: 978-81-322-2579-9
Online ISBN: 978-81-322-2580-5
eBook Packages: EngineeringEngineering (R0)