
Abstract
Conventional visual and manual road crack detection method is labor-consuming, non-precise, dangerous, costly and also it can affect transportation. With crack being the main distress in the actual pavement surface, digital image processing has been widely applied to cracking recognition recently. This paper presents the preprocessing method, segmentation method, the locating method, and a novel convolutional neural network based pavement cracking recognition method in the area of image processing. This paper trains and tests aforementioned 5-layer convolutional neural network on the pavement crack dataset. The experimental result shows that this 5-layer convolutional neural network performs better than that classical conventional machine learning method. Actual pavement images are used to verify the performance of this method, and the results show that the surface crack could be identified correctly and automatically. The convolutional neural network can learn the features of crack well and sort these aircraft with a high classification accuracy.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Pavement distress detection [1] plays a key role in highway maintenance and rehabilitation due to the fact that surface crack is the most common distress of all pavement distress. Therefore, the detection of crack is necessary for the highway especially high-grade highway maintenance. Traditionally, pavement crack detections are accomplished by manual approaches, which are not only time-consuming, labor-consuming, and dangerous, but costly. More importantly, besides the fact that ongoing detections affect traffic, the quality of detection is determined subjectively. Thus, the automatic pavement crack detection methods should be applied to overcome the shortcoming of conventional visual and manual method.
There have been many thoughtful studies on cracking auto-recognition [2, 3]. In general form, crack image detection is composed of preprocessing, description and identification. Pavement surface image has two characteristics: small scale of gray values, and small difference between background and objective within original image. In addition, there could be many noises in the image due to the diversity of image acquisition and the difference of surface materials. Many researchers have paid great attention to crack image processing in recent years, and the study centralized on the image enhancement and segmentation [4, 5].
In recent years, the advanced convolutional neural networks can automatically learn feature and generalized, which was applied to the pattern recognition tasks, and received a good response, such as image classifications [6], target detection [7], vehicle detection [8], and so on. But now crack classification is rare using convolutional neural networks.
The remainder of this paper is organized as follows. Section 2 presents the crack detection method. Section 3 describes the crack reorganization using convolutional neural networks. Section 4 demonstrates extensive experimental comparison results. Section 5 finally draws the conclusions.
2 The Detection of the Crack
2.1 Preprocessing
Gamma correction is an important nonlinear transformation. It is actually a transformation of the input image gray value, and then correct the brightness deviation, which usually is applied to expand the details of the dark light. In general, when Gamma correction value is greater than 1, the image highlights parts will be compressed and dark color will be expanding. When Gamma correction value is less than 1, highlights part is expanding and dark part of the image is compressed. By definition the following formula:
where A is constant, \( V_{in} \) is the input image before correction, \( V_{out} \) the rectified image, γ is gamma correction parameter. In this experiment, after repeated tests, when γ = 0.75 for crack images, the results will be the best. Gamma can be used to enhance the crack fractures.
Gaussian filter is a linear smoothing filtering, which is applicable to eliminate the Gaussian noise. It is widely used in image processing of the noise reduction. Popular speaking, Gaussian filtering is a process to the weighted average of the whole image, each pixel values, all by itself and other neighborhood pixels after the weighted average (Fig. 1).

Image preprocessing result: (a) original image, (b) Gamma correction and (c) filtering result
2.2 The Segmentation of the Crack
In [9], Lankton et al. proposed a natural framework that allows any region-based segmentation energy to be re-formulated in a local way. For example, we choose the global region-based energy that uses mean intensities is the one proposed by Yezzi et al. [10] which we refer to as mean separation energy:
where \( u \) and \( v \) represents the global mean intensities of the interior and exterior regions, respectively. Optimizing this energy causes that the interior and exterior means have the largest difference possible (Fig. 2).

The segmentation result
\( B(x,y) \) is introduced to mask local regions. This function \( B(x,y) \) will be 1 when the point \( y \) is within a ball of radius \( r \) centered at \( x \), and 0 otherwise.
Accordingly, the corresponding \( F \) is formed by localizing the global energy with local mean equivalents as shown:
We can get the following local region-based flow:
where \( A_{u} \) and \( A_{v} \) are the areas of the local interior and local exterior regions respectively given by
2.3 The Location of the Crack Based on OpenCV
After the image preprocessing and segmentation module, we can locate the crack in the original image. The specific method is morphologic closing operation to enhance regional characteristics of crack. Due to the segmentation of pavement cracks is a certain connected components of the image, by image contour detection function, to search for each connected component contour matrix, to judge the size of the contour by scanning in turn, to select the largest contour matrix which is selected as the largest connected component. Also it is available through intercepting the area by Region of interest function (Fig. 3).

The diagram of the locating algorithm
The results of the locating algorithm are shown in Fig. 4.

The running samples of locating algorithm of pavement cracks
3 The Recognition of the Crack
In recent years, deep convolutional neural network has been very popular. It can learn features by itself and shows excellent generalization ability. And it has been widely used in the areas of computer vision and pattern recognition. However, at present, it is rare to apply convolutional neural networks to this issue. This paper aims at solving aircraft classification problem in optical remote sensing images using convolutional neural networks.
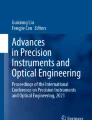
For crack classification problems, this convolution neural network structure is shown in Fig. 5, the network has 5 layers, the first 4 are a convolution layer, the final layer is for all connections.

The structure of convolutional neural network
The input of Network are the 256 × 256 size of the three channels (RGB) images. To ensure the network depth, to reduce the parameter, to improve network generalization, the convolution kernels using in the first three volumes of the network layer are smaller, they are 3 × 3. Finally a convolution kernel size is 15 × 15. All the convolution kernel effect simultaneously on all the features to the previous one, and the same different characteristics of convolution kernel to the former figure weight is not consistent. Four layers of convolution type of convolution kernel used is 64, 96, 96, 216, layer-by-layer abstraction to extract different features.
In the first three volumes are all connected to the pooling layer the pooling method is the largest pooling. Images are not expanded in the pooling, the window size of pooling are 2 × 2, 3 × 3, 4 × 4, sliding windows step are 2, 2, 4. After each pooling layer are nonlinear activation through the LeRU.
The final layer are all connection layer, a total of 8 nerve cells. The final convolution and all connection layer are added by random dropout layer to improve network generalization, the percentage is 0.5. Finally softmax function is used for output.
4 Experiments
The experiments are implemented with VC++ code run on a Dell Dimension 4600 PC, with Pentium 4 processor, 2.80 GHz, 1 GB RAM, on Windows XP.
They are downsampled as 8 * 8 images, which are composed of 128 dimensional vector as input layer, the hidden layer of 3 layers and 128 dimensions, the output layer of 10 dimensions. The images are classified to four categories (transverse crack, longitudinal crack, reticular crack sets, excess road information set), each type of 50 crack images are for training, and crack classifier is exported. After experiment and testing, and the crack can be accurately identified. Furthermore, high recognition rate.
The results of different crack images recognition are shown in Fig. 6. We further list the testing accuracy between the proposed method and the classic SVM (support vector machine) method (Table 1).

The results of different fracture images recognition
5 Conclusions
In this paper we present a novel convolutional neural network based cracking identification method. Image preprocessing is introduced first as consisting of Gamma correction, spatial filtering, and binary processing. Then by segmenting pavement crack images using active contour model and locating crack, we locate the cracks efficiently, and use them to train our neural network. After convolutional neural network converges and identifies crack from pavement surface image. We finally revise convolutional network outputs to remove isolated crack points and connect crack for better identification accuracy. Our experiment indicates that crack could be identified by the convolutional network based identifier correctly and automatically.
References
Zhang, J., Huai, G., Sun, Z.: Based on digital image processing of pavement crack automatic identification and evaluation systems. Nat. Sci. Chang’an Univ. J. 2, 18–22 (2004)
Sun, B., Qiu, Y.: Pavement cracks identification using image technology. J. Chongqing Jiaotong Univ. (Nat. Sci.) 27(1), 61–64 (2008)
Yan, M., Bo, S., Li, X., He, Y.: An adaptive fuzzy image enhancement algorithm for local regions. In: Proceedings of the 26th Chinese Control Conference, China, pp. 308–311 (2007)
Lee, B.J., Lee, H.: A position-invariant neural network for digital pavement crack analysis. Comput. Aided Civ. Infrastruct. Eng. 19, 105–118 (2004)
Sun, B., Qiu, Y.: Automatic identification of pavement cracks using mathematic morphology. In: International Conference on Transportation Engineering America, pp. 1783–1788. American Society of Civil Engineering Press (2007)
Szegedy, C., et al.: Going deeper with convolutions. In: Proceedings of IEEE Computer Vision and Pattern Recognition, Boston, MA, USA, 8–10 June 2015, pp. 1–9 (2015)
Girshick, R., Donahue, J., Darrell, T., et al.: Rich feature hierarchies for accurate object detection and semantic segmentation. In: Proceedings of IEEE Computer Vision and Pattern Recognition, pp. 580–587 (2014)
Chen, X., Xiang, S., Liu, C., et al.: Vehicle detection in satellite images by hybrid deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 11(10), 1797–1801 (2014)
Lankton, S., Tannenbaum, A.: Localizing region-based active contours. IEEE Trans. Image Process. 11(17), 2029–2039 (2008)
Yezzi, J.A., Tsai, A., Willsky, A.: A fully global approach to image segmentation via coupled curve evolution equations. J. Vis. Commun. Image Representation 13(1), 195–216 (2002)
Acknowledgment
This work is sponsored by the National Natural Science Foundation of China (NSFC) #61402192, six talent peaks project in Jiangsu Province (XYDXXJS-011, XYDXXJS-012), the Jiangsu Key Laboratory of Image and Video Understanding for Social Safety (Nanjing University of Science and Technology) Grant No. 30916014107, Jiangsu university students’ innovative undertaking projects No. 201611049034Y.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer-Verlag GmbH Germany
About this chapter

Cite this chapter
Gao, S., Jie, Z., Pan, Z., Qin, F., Li, R. (2018). Automatic Recognition of Pavement Crack via Convolutional Neural Network. In: Pan, Z., Cheok, A., Müller, W. (eds) Transactions on Edutainment XIV. Lecture Notes in Computer Science(), vol 10790. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-56689-3_7
Download citation
DOI: https://doi.org/10.1007/978-3-662-56689-3_7
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-56688-6
Online ISBN: 978-3-662-56689-3
eBook Packages: Computer ScienceComputer Science (R0)