
Abstract
Shakedown theory for elastic limited-kinematic-hardening-plastic structures has been introduced, with applications to plane stress problems.
Access provided by Autonomous University of Puebla. Download reference work entry PDF
Similar content being viewed by others


Synonyms
Definition
Shakedown theory defines the load limits and respective collapse deformation modes for elastic plastic structures under loading cycles. A structure made of elastic plastic material under loading, after an initial stage of possible limited plastic deformation (of finite total plastic dissipation), may eventually shake down to some residual stress state, from which it subsequently responds elastically (hence safely) to the external agencies. Otherwise, the structure is considered as having failed, because of the instantaneous plastic collapse (corresponding to the maximal static load bearing capacity of the structure), or the plastic deformation would accumulate unrestrictively over loading cycles (the mode is called the ratchetting or incremental collapse one), or the plastic deformation should be bounded but vary cyclically and unceasingly (fatigue, cyclic, rotating plasticity, or alternating plasticity collapse).
In principle shakedown incremental checking for a structure can be performed for any sophisticated elastic plastic material model in small or large deformations, following a particular loading history. Powerful shakedown theorems can be constructed for certain classes of elastic plastic materials (Koiter, 1963; Pham, 2003, 2007, 2008, 2017). The essential advantage of the theorems is their path independence: the theorems determine the time-independent boundary in the loading space, under which a structure is safe regardless of particular loading histories, while the structure fails if the boundary is allowed to be violated unrestrictively. There is a singular point in the theorems because most usual yield conditions, including the Mises and Tresca ones, in the general case do not restrict the hydrostatic stress, while the plastic strain is restricted to be deviatoric, which requires special treatments. However, for many practical thin structures, including the plane stress ones, there is no kinematic restriction in a thickness direction for the hydrostatic stress to build up unrestrictively, and the singularity problem disappears.
Like the plastic limit theorems (the limiting case of the shakedown ones), the shakedown static and kinematic theorems are stated as the nonlinear optimization problems. Second-order cone programming techniques are especially effective in solving the elastic plastic plane stress problems.
Limited Kinematic Hardening Plasticity Theory
Basic assumptions of classical phenomenological plasticity theory and plastic limit and shakedown theorems include the small deformation, the plastic incompressibility, the similarity of the yield stresses in tension and compression, and the rate independence of the plastic stress-strain response ones.
Let σ, εp, ep be the real stress, plastic strain, and plastic strain rate tensors and σ∗ be any allowable stress state (i.e., that within the elastic domain inside the yield surface). The plastic deformation is supposed to follow Hill’s principle of maximal dissipation (Koiter, 1963; König, 1987; Pham 2017).
Maximal Dissipation Hypothesis
which implies normality rule (or associated flow law) for the plastic strain rate and convexity of the yield surface. Stronger Drucker postulate, which implies Hill principle and requires additionally the material to be stable (softening is not allowed, in particular dσ : dεp ≥ 0), can also be assumed.
The general limited kinematic hardening plasticity (the two-yield surface model) is considered, which involves the classical elastic perfectly plasticity as a limiting case. The particular hardening law relating the back stress α to the corresponding plastic deformation \(\boldsymbol {\varepsilon }^p_\alpha \) is generally nonlinear and plastic deformation path dependent and needs not to be specified, but the imposing hypotheses on the two-surface plastic hardening are stated as follows (needed for the construction of path-independent shakedown theorems). A representative material element in homogeneous stress-strain state is considered. The size of the yield surface Γα, which envelopes the elastic domain \({\mathscr {Y}}_\alpha \) centered at the (deviatoric) back stress α in the stress space, is determined by the initial yield stress \(\sigma ^i_Y\), in particular for Mises material
where \(\bar {\boldsymbol {\sigma }}\) denotes the deviatoric part of the stress tensor σ. The elasticity domain \({\mathscr {Y}}_\alpha \) bounded by surface Γα is translated in the stress space following its center α without changing size and form. However, the hardening is supported to be limited, and the set of all allowable stresses is restricted by the unmovable ultimate yield surface Γu, which encompasses the respective ultimate domain \({\mathscr {Y}}_u\) and is defined by the ultimate yield stress \(\sigma ^u_Y\), using the Mises criterium
A picture of the yield surfaces for the material element (under homogeneous stress-strain state) in the deviatoric stress coordinates \(\bar {\sigma }_{ij}\) is presented in Fig. 1a, with the origin of the coordinates being the center of the ultimate yield hypersphere \({\mathscr {Y}}_u\). Since the stress σ is bounded by the ultimate surface Γu, the domain \({\mathscr {Y}}_\alpha \) containing the recent state σ with back stress at the center cannot lie entirely outside the domain \({\mathscr {Y}}_u\), and the back stress is automatically bounded above, at most by the surface Γ0α, as can be seen in Fig. 1a.


Yield surfaces in the deviatoric stress coordinates: Γu – the ultimate yield surface; Γα – the moving inner yield surface centered at α (or αI, αII); Γ0α, \(\Gamma _u^{\prime }\), \(\Gamma _u^{\prime \prime }\) – the possible limiting surfaces for the back stress α; σ1, σ2, or σ′1, σ′2, σ′3 – some stress picks on the inner yield surfaces
The usual normality yield rule is assumed on both yield surfaces Γα and Γu, but they do not act simultaneously. When the two criteria attained simultaneously (the stress state is on both yield surfaces), the material yields according to that corresponding to the ultimate yield surface. The total plastic strain rate ep and plastic strain εp are composed of those two components:
Strictly Stable Hardening Hypothesis (Pham 2017)
where h0 is some nonvanishing positive value. The condition indicates that the bending angle of the hardening curve against the horizontal strain coordinate (of the strain-stress system of coordinates) in an uniaxial experiment should always be larger than a finite positive value. The hypothesis, together with the two-surface hardening model, implies the upper bound limitation of \(\boldsymbol {\varepsilon }^p_\alpha \) (Pham 2017). It is clear that the strict stability here requires more than that of Drucker stability; however, it applies only to \(\boldsymbol {\varepsilon }_\alpha ^p\), not to \(\boldsymbol {\varepsilon }_u^p\) and hence εp generally. Alternatively, the assumption (5) could also be substituted by
Positive hysteresis hypothesis
(Pham, 2007, 2017): For any closed cycle of plastic deformation \(\boldsymbol {\varepsilon }_\alpha ^p\) [over a period 0 ≤ t ≤ θ, \(\boldsymbol {\varepsilon }_\alpha ^p(0)=\boldsymbol {\varepsilon }_\alpha ^p(\theta )\)]
Note that, generally, it is not required that α(0) = α(θ). Condition (7) implicates that the loading-unloading cycle should mostly follow clockwise direction along the hysteresis loop, but not anticlockwise. Instead of (7), it might also be presumed, instead, that
In an uniaxial reversed loading experiment, the Bauschinger effect is observed with perfect elastic behavior intervals (centered at the respective back stress α) between the loading and unloading yield points of the size \(2\sigma _Y^i\), which shall be referred to as the Bauschinger diameter. For the full meaning of the two-yield surface hardening model, the following crucial assumptions are assumed (Pham 2017).
Multiaxial Bauschinger hypothesis 1:
The Bauschinger diameter keeps the same constant value \(2\sigma _Y^i\) for reversal loading in any loading direction at any place within the ultimate hypersphere \({\mathscr {Y}}_u\) of the two-surface hardening assumption.
The translation of the hypersphere \({\mathscr {Y}}_\alpha \) of Bauschinger diameter \(2\sigma _Y^i\) following its center α without changing size and form in the stress space has been assumed for the kinematic hardening plasticity generally, and this assumption should allow broad possible back stresses α:
Multiaxial Bauschinger hypothesis 2:
All the back stresses α centered between any two admissible stresses σ1, σ2 distanced at Bauschinger diameter \(2\sigma _Y^i\) within the ultimate hypersphere \({\mathscr {Y}}_u\) are admissible. Moreover, any back stress center α of a hypersphere \({\mathscr {Y}}_\alpha \) uniquely enclosing the cycle stress picks σ′1, σ′2, σ′3, … of a loading process, which belong to \({\mathscr {Y}}_u\), is admissible. The back stress α, if originally positioned otherwise, should converge toward that central point, as the stress cycles are repeated.
Two examples of admissible back stress centers αI and αII with respective hyperspheres \({\mathscr {Y}}_\alpha \) are given in Fig. 1b, which may be not enveloped by Γu, and illustrate the hypothesis.
The reasonable set \({\mathscr {B}}\) of possible back stresses α, which is – at least – bounded by Γ0α (see Fig. 1a), might be the domain enveloped by the set of all possible midpoints of the chords with Bauschinger size \(2\sigma _Y^i\) of the ultimate yield surface Γu, which is presented as the surface \(\Gamma _u^{\prime }\) just inside Γu in Fig. 1b. The finite set \({\mathscr {B}}\) need not to be specified in proving the path-independent shakedown theorems.
Shakedown Theorems and Plastic Collapse Modes
Let σe(x, t) denote the fictitious elastic stress response of the body V (under the assumption of its perfectly elastic behaviour) to external agencies over a period of time (x ∈ V, t ∈ [0, T]), called a loading history. The actions of all kinds of external agencies upon V can be expressed explicitly through σe. At every point x ∈ V , the elastic stress response σe(x, t) is confined to a bounded time-independent domain with prescribed limits in the stress space, called a local loading domain \({\mathscr {L}}_x\). As a field over V , σe(x, t) belongs to the time-independent global loading domain \({\mathscr {L}}\):
In the spirit of shakedown theorems, the bounded loading domain \({\mathscr {L}}\), instead of a particular loading history σe(x, t), is given a priori. Shakedown of a body in \(\mathscr {L}\) means it shakes down for all possible loading histories \(\boldsymbol {\sigma }^e({\mathbf {x}},t)\in {\mathscr {L}}\).
Let ks denote the shakedown safety factor: at ks > 1 the structure will shake down, while it will not at ks < 1, and ks = 1 defines the boundary of the shakedown domain.
Shakedown static theorem (Pham, 2007, 2017)
where
\(\mathscr {R}\) is the set of admissible time-independent self-equilibrated residual stress fields ρ(x) that satisfy homogeneous equilibrium equations on V ; ρ′ is a time-independent stress field that is not requied to be self-equilibrated; \({\mathscr {Y}}_u\) designates the elastic domain in the stress space that is bounded by the yield surface determined by the ultimate yield stress \(\sigma _Y^u\), while \({\mathscr {Y}}_i\) is the respective domain bounded by the yield surface determined by the initial yield stress \(\sigma _Y^i\).
In the case \(\sigma ^i_Y=\sigma ^u_Y=\sigma _Y \), statement (11) leads to the classical shakedown static theorem for perfectly plastic body: at \(\bar {U}>1\) (safe), sum of the time-independent residual stress ρ and the elastic stress σe over the whole body is in a safe state defined by the yield surface \({\mathscr {Y}}_u \), while at \(\bar {U}<1\) (unsafe) no such residual stress should exist. Statement (12) verifies just the possibility of the bounded cyclic plasticity mode determined by the yield stress \(\sigma _Y^i\): if the range of the varying part of the stress σe (from the static part ρ′) everywhere inside the body should be smaller than the size of the yield surface \({\mathscr {Y}}_i\) (safe with respect to the mode) or not (unsafe).
In plane stress problems, it is presumed that σ33 = σ31 = σ32 = 0, and subsequently ε31 = ε32 = 0; also \(\sigma ^e_{33}=\sigma ^e_{31}=\sigma ^e_{32}=0\). The plastic incompressibility implies \(\varepsilon ^p_{33}=-\varepsilon ^p_{11}-\varepsilon ^p_{22}\). The yield condition (3) has the particular expression for Mises material
(it is obvious that all the components of the stresses are bounded by the yield condition in the case – in contrast with the general three-dimensional case where the hydrostatic stress is unlimited by Mises yield condition), while the dissipation function has the particular expression for Mises material
which is clearly a positive quadratic form of the two-dimensional plastic strain rate components that is needed for application of second-order cone programming techniques to solve the optimization problem based on the kinematic theorem that followed.
Shakedown kinematic theorem (Pham, 2007, 2017)
where
\({\mathscr {A}}\) is the set of compatible-end-cycle plastic strain rate fields ep over the time cycles 0 ≤ t ≤ T:
\({\mathscr {C}}\) is the set of compatible plastic strain increment fields on V ; \(\hat {\mathbf {e}}^p\) and ρ′ are plastic strain rate and time-independent stress fields that are not required to satisfy any compatibility and equilibrium constraints, respectively; Du(ep) and Di(ep) are the dissipation functions with \(\sigma _Y^u\) and \(\sigma _Y^i\) taking the places of σY, respectively.
In the case \(\sigma ^i_Y=\sigma ^u_Y=\sigma _Y \), statement (16) leads to the classical shakedown kinematic theorem for perfectly plastic body: at U < 1 (safe), the internal plastic dissipation capacity of the body is greater than the possible mechanical work of the external agencies, while at U>1 (unsafe), the reverse is true. Statement (17) verifies just the possibility of the bounded cyclic plasticity mode determined by the yield stress \(\sigma _Y^i\): if the range of the varying part of the stress σe around the static part ρ′ everywhere inside the body should be smaller than the size of the yield surface \({\mathscr {Y}}_i\) (safe with respect to the mode) or not (unsafe).
In summary, statements (11) and (16) are identical to those of the shakedown static and kinematic theorems for elastic perfectly plastic material with the (ultimate) yield stress \(\sigma _Y^u\), while statements (12) or (17) are just expressions of the bounded cyclic plasticity mode determined by the (initial) yield stress \(\sigma _Y^i\). In contrast to the global mode (11) involving the self-equilibrated residual stress field ρ over V [or (16) involving the end-cycle-compatible plastic strain rate field ep over V ], the mode (12) [or (17)] is local and can be checked at every point x ∈ V separately. At \(\bar {U}>\bar {C}\) of criterion (10) [or U < C of criterion (15)], the nonshakedown collapse mode is cyclic plasticity; otherwise the incremental plasticity collapse mode prevails.
For applications, the following reduced kinematic theorem is useful (Pham and Stumpf, 1994; Pham, 2003, 2008)
Reduced kinematic theorem
where
the latest problem (21) can be solved explicitly for Mises material (\(\bar \sigma ^e\) is the deviatoric part of σe):
The reduced kinematic theorem (19), (20), (21), and (22) is simpler than the kinematic theorem (15), (16), and (17). In particular, as the incremental collapse criterion (20) is compared to the criterion (16), the incremental collapse mode (20) does not involve time integrals and has the expression almost as simple as that of the respective plastic limit kinematic theorem, with only the difference that the underintegral maximum operation over time parameter t is taken at every point x ∈ V separately, which makes the incremental collapse criterion (20) more conservative than the plastic limit one (Pham and Stumpf, 1994; Pham, 2003). Hence available kinematic methods of plastic limit analysis can be modified to be used to solve problem (20). Meanwhile, the simple expression (21) or solution (22), measuring the size of change of the stresses in alternating directions against the diameter of the yield surface, indicates the alternating plasticity collapse mode. For a broad class of practical problems, where the components of plastic deformations at every point inside a structure should change proportionally during loading cycles, the exact equality \(k_s=\hat k_s\) has been proved. Generally \(\hat k_s\) is expected to provide a very good upper bound estimate, if not the exact value, of ks. Indeed, \(k_s=\hat k_s\) for most practical examples considered. Still, certain sophisticated structure and loading program have been constructed in Le et al. (2016) to exhibit the strict inequalities \(k_s<\hat k_s\) and A > C, though the differences are small. The question if \(k^{-1}_s=\max \;\{ I,C\}\) still remains an open problem.
Examples of Application
Besides the semi-analytical solutions of shakedown problems for certain simple structures (König, 1987; Pham and Stumpf, 1994; Pham, 2014, etc.), numerical finite element method has been developed to solve certain, mostly two-dimensional plane stress, plastic limit and shakedown problems (Belytschko, 1972; Weichert and Gross-Weege, 1988; Gross-Weege, 1997; Zhang et al., 2002; Zhang and Raad, 2002; Garcea et al., 2005; Tran et al., 2010; Nguyen-Xuan et al., 2012, etc.).
For engineering applications, the shakedown theorems for elastic perfectly plastic structures (11) and (16) lead to the finite element large-scale nonlinear convex optimization problems with large numbers of variables and constraints. Direct iterative optimization algorithms have been developed to provide solution of such the nonlinear programming, where the primal-dual interior-point method (Andersen et al., 2001, 2003) has been found to be especially efficient and robust. The algorithm has been extended to both static and kinematic shakedown analysis problems (Vu et al., 2004; Bisbos et al., 2005; Makrodimopoulos, 2006; Weichert and Simon, 2012; Simon, 2013; Tran et al., 2014; Le et al., 2016).
An effective approach has been developed to solve numerically the incremental plasticity collapse mode (20) in Tran et al. (2014) and Le et al. (2016), though a general appropriate direct algorithm of solution is still awaited.
The local bounded cyclic mode (12) of the static theorem has a form of the smallest enclosing ball problem (Cheng et al., 2006; Nam et al., 2012), for which majorization-minimization principle and Nesterov smooth algorithm can be applied. The algorithm has been implemented successfully for shakedown analysis in Le et al. (2016).
Example 1 (Square plate with a circular hole (Tran et al., 2014))
The first example deals with a square plate with central circular hole, which is subjected to quasi-static biaxial uniform loads (Fig. 2)
Due to symmetry, only the upper-right quarter of the plate is modeled, and symmetry conditions are enforced on the left and bottom edges. The input data was assumed as follows: E = 2.1 × 105. MPa, ν = 0.3, L = 10 m, D∕L = 0.2, and σY = 200. MPa. \(\sigma _Y^u=\sigma _Y^i=\sigma _Y\) is assumed, which corresponds to the elastic-perfectly plastic case. Graphics of the collapse curves are presented in Fig. 3. As p1∕σY increases from 0.4, the nonshakedown mode switches from the incremental plasticity collapse mode to the alternating plasticity one and vice versa, at certain values of the external load limits; the incremental plasticity collapse curve I = 1 of Eq. (20) does not coincide with the plastic limit ones. The lower envelope of the incremental plasticity collapse I = 1 of Eq. (20) and alternating plasticity collapse A = 1 of Eq. (22) curves agrees with the result ks = U = 1 of direct application of Koiter’s theorem (16), using FEM-DUAL method of Vu et al. (2004). In the case of hardening plasticity material, the alternating plasticity collapse curve should be lowered according to the relation \(\sigma _Y^i/\sigma _Y\) (assuming \(\sigma _Y^u=\sigma _Y\)). Numerical application of the static theorem (10) yields the same results as those of the kinematic theorem (15) (Le et al., 2016).


The upper-right quarter of the square plate with a circular hole subjected to quasi-static biaxial uniform loads, and a finite element mesh


The incremental plasticity collapse curve I = 1, alternating plasticity collapse curve A = 1, proportional plastic limit curve, plastic limit curve, and nonshakedown curve using FEM-DUAL method, for the square plate with a circular hole subjected to biaxial uniform loads \(0.4p_1\le p_1^{\prime }\le p_1,\; 0.4p_2\le p_2^{\prime }\le p_2\)
Example 2 (Grooved rectangular plate (Tran et al., 2014))
A grooved rectangular plate subjected to in-plane tension pN, and bending pM, as shown in Fig. 4, is considered. The load domain is given by
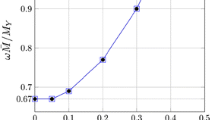
Graphics of the collapse curves are projected in Fig. 5. As pM∕σY increases from 0.035, the nonshakedown mode switches from the alternating plasticity collapse mode to the incremental plasticity one, at about the middle of the range; the incremental plasticity collapse curve I = 1 lies strictly below the plastic limit curve, the latter coincides with the proportional plastic limit one. The lower envelope of the incremental plasticity collapse I = 1 and alternating plasticity collapse A = 1 curves also agrees with the result ks = U = 1 of direct application of Koiter’s theorem, using FEM-DUAL method.


A grooved rectangular plate subjected to varying tension and bending and a finite element mesh


The incremental plasticity collapse curve I = 1, alternating plasticity collapse curve A = 1, proportional plastic limit curve (coincides with the plastic limit one), and nonshakedown curve using FEM-DUAL method, for the grooved rectangular plate subjected to varying tension and bending
Initial Yield Stress
The initial yield stress \(\sigma _Y^i\) defining the cyclic or alternating plasticity collapse mode and the ultimate yield stress \(\sigma _Y^u\) determining the incremental collapse one are two basic plastic parameters for shakedown safety assessment of elastic plastic structures under variable and cyclic loads. Plastic deformation often starts from microscopic through mesoscopic to macroscopic scales without clear boundary. For high-cycle processes, \(\sigma _Y^i\) should be taken as small as the fatigue limit, since it defines that mode of collapse. For other ranges of cycles, \(\sigma _Y^i\) can be given higher values according to the respective fatigue curve. That fact is important for practical dynamic loading, where the number of loading cycles can be high (Pham, 2007, 2008, 2010).
Cross-References
References
Andersen KD, Christiansen E, Overton ML (2001) An efficient primal-dual interior-point method for minimizing a sum of Euclidean norms. SIAM J Sci Comput 22:243–262
Andersen ED, Roos C, Terlaky T (2003) On implementing a primal-dual interior-point method for conic quadratic programming. Math Prog 95:249–277
Belytschko T (1972) Plane stress shakedown analysis by finite elements. Int J Mech Sci 14:619–625
Bisbos CD, Makrodimopoulos A, Pardalos PM (2005) Second order cone programming approaches to static shakedown analysis in steel plasticity. Optim Meth Softw 20:25–52
Cheng D, Hu X, Martin C (2006) On the smallest enclosing balls. Commun Inf Syst 6:137–160
Garcea G, Armentano G, Petrolo S, Casciaro R (2005) Finite element shakedown analysis of two-dimensional structures. Int J Numer Method Eng 63:1174–1202
Gross-Weege J (1997) On the numerical assessment of the safety factor of elastic-plastic structures under variable loading. Inter J Mech Sci 39:417–433
Koiter WT (1963) General theorems for elastic-plastic solids. In: Sneddon IN, Hill R (eds) Progress in solids mechanics. North-Holland, Amsterdam, pp 165–221
König A (1987) Shakedown of elastic-plastic structures. Elsevier, Amsterdam
Le VC, Tran TD, Pham DC (2016) Rotating plasticity and nonshakedown collapse modes for elastic-plastic bodies under cyclic loads. Int J Mech Sci 111–112: 55–64
Makrodimopoulos A (2006) Computational formulation of shakedown analysis as a conic quadratic optimization problem. Mech Res Commun 33:72–83
Nam NM, An NT, Salinas J (2012) Applications of convex analysis to the smallest intersecting ball problem. J Convex Anal 19:497–518
Nguyen-Xuan H, Rabczuk T, Nguyen-Thoi T, Tran TN, Nguyen-Thanh N (2012) Computation of limit and shakedown loads using a node-based smoothed finite element method. Int J Numer Methods Eng 90: 287–310
Pham DC (2003) Shakedown theory for elastic-perfectly plastic bodies revisited. Int J Mech Sci 45:1011– 1027
Pham DC (2007) Shakedown theory for elastic plastic kinematic hardening bodies. Int J Plast 23:1240– 1259
Pham DC (2008) On shakedown theory for elastic-plastic materials and extensions. J Mech Phys Solids 56:1905–1915
Pham DC (2010) Shakedown working limits for circular shafts and helical springs subjected to dynamic fluctuating loads. J Mech Mater Struct 5: 447–458
Pham DC (2014) Reduced shakedown formulation in plane stress problems. Int J Comp Methods Sing 11:1343009
Pham DC (2017) Consistent limited kinematic hardening plasticity theory and path-independent shake-down theorems. Int J Mech Sci 130:11–18
Pham DC, Stumpf H (1994) Kinematical approach to shakedown analysis of some structures. Q Appl Math 52:707–719
Simon JW (2013) Direct evaluation of the limit states of engineering structures exhibiting limited, nonlinear kinematical hardening. Int J Plast 42: 141–167
Tran TD, Le CV, Pham DC, Nguyen-Xuan H (2014) Shakedown reduced kinematic formulation, separated collapse modes, and numerical implementation. Int J Solid Struct 51:2893–2899
Tran TN, Liu GR, Nguyen-Xuan H, Nguyen-Thoi T (2010) An edge-based smoothed finite element method for primal-dual shakedown analysis of structures. Int J Numer Methods Eng 82: 917–938
Vu DK, Yan AM, Nguyen DH (2004) A dual form for discretized kinematic formulation in shakedown analysis. Int J Solids Struct 41:267–277
Weichert D, Gross-Weege J (1988) The numerical assessment of elastic-plastic sheets under variable mechanical and thermal loads using a simplified two-surface yield condition. Int J Mech Sci 30: 757–767
Weichert D, Simon JW (2012) Shakedown analysis with multidimensional loading spaces. Comput Mech 49:477–485
Zhang T, Raad L (2002) An eigen-mode method in kinematic shakedown analysis. Int J Plast 18: 71–90
Zhang Z, Liu Y, Cen Z (2002) Boundary element methods for lower bound limit and shakedown analysis. Eng Anal Bound Elem 28:905–917
Acknowledgements
Pham DC is supported by VAST Project NCVCC03.01/18-18 and NAFOSTED Project 107.02-2018.15.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer-Verlag GmbH Germany, part of Springer Nature
About this entry

Cite this entry
Pham, DC., Le, CV., Tran, TD. (2020). Shakedown and Plastic Collapse in Plane Stress Problems. In: Altenbach, H., Öchsner, A. (eds) Encyclopedia of Continuum Mechanics. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-55771-6_271
Download citation
DOI: https://doi.org/10.1007/978-3-662-55771-6_271
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-55770-9
Online ISBN: 978-3-662-55771-6
eBook Packages: EngineeringReference Module Computer Science and Engineering