
Abstract
In this paper, an anti-disturbance tracking control scheme is proposed for T-S fuzzy models subject to parametric uncertainties and unknown disturbances. Different with those previous results, exogenous disturbances are also described by T-S disturbance models. Under this framework, a composite observer is constructed to estimate the system state and the disturbances simultaneously. Meanwhile, by integrating the PI-type control algorithm with the estimates of the state and the disturbance, a feedback control input is designed to ensure the system stability and the convergence of the tracking error to zero as well as satisfactory disturbance estimation and attenuation performance.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- T-S fuzzy models
- Anti-disturbance control
- Tracking control
- Disturbance observer
- T-S disturbance modeling
17.1 Introduction
It is well known that disturbances exist in all practical processes [1–5]. In recent years, disturbance observer based control (DOBC) strategies have been successfully used in various systems, such as robot manipulators [6–8], high speed direct-drive positioning tables [9], permanent magnet synchronous motors [10] and magnetic hard drive servo systems [11] etc. However, the exogenous disturbances in most DOBC results [12, 13] are supposed to be generated by linear exogenous system, while there are always irregular and nonlinear disturbances in practical systems, which will no longer be effective by using the present model-based disturbance observer design methods.
On the other hand, Takagi-Sugeno (T-S) fuzzy model becomes very popular since it is a powerful tool for approximating a wide class of nonlinear systems, such as descriptor systems [14], networked control systems [15, 17], stochastic systems [16] and time-delay systems [15]. Furthermore, some typical control problems, including dynamic tracking control [18], fault estimation and detection [19], sliding-mode control [20] and filter design [21] have also been considered through T-S fuzzy modeling.
This paper discusses the anti-disturbance tracking control for the T-S fuzzy models with parametric uncertainties and irregular disturbances. Following the T-S fuzzy modeling for unknown irregular disturbances, the composite anti-disturbance controller are designed by combining PI control structure and disturbance observer design method. It is shown that the stability and the favorable tracking performance of augmented systems can achieved by using convex optimization algorithm and Lyapunov analysis method. Finally, simulation results in flight control system are given to show the efficiency of the proposed approach.
17.2 Model Description with Fuzzy Disturbance Modeling
Considering the following T-S fuzzy model with parametric uncertainties and exogenous disturbances
Plant Rule a: If \(\vartheta _{1}\) is \(M_{1}^{a}\), and \(\cdots \) and \(\vartheta _{q}\) is \(M_{q}^{a}\), then
where \(\vartheta =[\vartheta _{1},\ldots ,\vartheta _{q}]\) and \(M_{g}^{a}(a=1,2,\ldots ,p)\) are the premise variables and the fuzzy sets, respectively. p, q are the numbers of If-Then rules and premise variables, respectively. \(x(t)\in R^{n},u(t)\in R^{m}, d_{1}(t)\in R^{m},d_{2}(t)\in R^{n}\) and \(y(t)\in R^{p_{1}}\) are the control input, modeled disturbance, unmodeled disturbance with bounded peaks and the measurement output, respectively. \(A_{0a}, B_{0a}, C_{0a}\) are the coefficient matrices with appropriate dimensions. \(\varDelta A_{0a}\) and \(\varDelta B_{0a}\) represent parametric uncertainties.
The overall fuzzy model can be inferred as follows
where \(\sigma _{a}(\vartheta )=\prod _{g=1}^{q}M_{g}^{a}(\vartheta _{g}),h_{a}(\vartheta )=\sigma _{a}(\vartheta )/\sum _{a=1}^{p}\sigma _{a}(\vartheta ) \), in which \(M_{g}^{a}(\vartheta _{g})\) is the grade of membership of \(\vartheta _{g}\) in \(M_{g}^{a}\) and \(h_{a}(\vartheta )\ge 0,\sum _{a=1}^{p}h_{a}(\vartheta )=1\).
Moreover, the nonlinear disturbances \(d_{1}(t)\) can be generated by the following T-S fuzzy model with r plant rules.
Plant Rule j: If \(\theta _{1}\) is \(A_{1}^{j}\), and \(\cdots \) and \(\theta _{n}\) is \(A_{n}^{j}\), then
where \(W_{j}\) and \(V_{j}\) are known coefficient matrices. \(\theta _{i}(i=1,\ldots ,n)\) and \(A_{i}^{j}(j=1,2,\ldots ,r)\) are the premise variables and the fuzzy sets, respectively. r is the number of If-Then rules, while n is the number of the premise variables.
By fuzzy blending, the overall fuzzy model can be defined as follows
where \( \omega _{j}(\theta )=\prod _{i=1}^{n}A_{i}^{j}(\theta _{i}), h_{j}(\theta )=\omega _{j}(\theta )/\sum _{j=1}^{r}\omega _{j}(\theta ) \), \(\theta =[\theta _{1},\ldots ,\theta _{n}], j=1,\ldots ,r\) is the membership function of the system with respect to plant rule j, and \(h_{j}(\theta )=\omega _{j}(\theta )/\sum _{j=1}^{r}\omega _{j}(\theta )\).
The uncertainties in T-S fuzzy model (1) are assumed to be of the form
where \(H,E_{1a}\) and \(E_{2a}\) are constant matrices with corresponding dimensions. F(t) is an unknown, real and possibly time-varying matrix with Lebesgue measurable elements satisfying
Lemma 1
Assume that X and Y are vectors or matrices with appropriate dimension. The following inequality
holds for any constant \(\alpha >0\).
17.3 Design of DOB PI Composite Controller
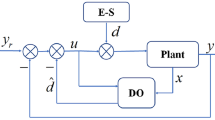
In this section, we construct a composite full-state observer to estimate the state x(t) and the disturbance \(d_{1}(t)\) simultaneously.
Based on the above-mentioned T-S fuzzy model (2), we introduce a new state variable
where the tracking error e(t) is defined as \(e(t)=y(t)-y_{d}\), \(y_{d}\) is the reference output. Then the augmented system can be established as
where \(A_{a} = \left[ \begin{array}{cc} A_{0a}+HFE_{1a} &{} 0 \\ C_{0a} &{} 0 \\ \end{array} \right] , B_{a}=\left[ \begin{array}{c} B_{0a}+HFE_{2a} \\ 0 \\ \end{array} \right] , C=\left[ \begin{array}{c} 0 \\ -I \\ \end{array} \right] , J=\left[ \begin{array}{c} I \\ 0 \\ \end{array} \right] \).
By combining the exogenous disturbance model (4) with T-S fuzzy model (2), the augmented system can be further constructed by
where \(z(t)=[x^{T}(t),w^{T}(t)]^{T}\), \({} \bar{A}_{0aj}=\left[ \begin{array}{cc} A_{0a}+HFE_{1a} &{} (B_{0a}+HFE_{2a})V_{j} \\ 0 &{} W_{j} \\ \end{array} \right] , \bar{B}_{0a}=\left[ \begin{array}{c} B_{0a}+HFE_{2a} \\ 0 \\ \end{array} \right] , \bar{C}_{0a}=\left[ \begin{array}{cc} C_{0a} &{} 0 \\ \end{array} \right] , \bar{J}=\left[ \begin{array}{cc} I &{} 0 \\ \end{array} \right] ^{T} \).
The composite observer for both x(t) and w(t) is designed as
where \(\hat{z}(t)=[\hat{x}^{T}(t),\hat{w}^{T}(t)]^{T}\), \(L=[L^{T}_{1},L^{T}_{2}]^{T}\) is the observer gain to be determined later. Moreover, the full-state estimation error \(\tilde{e}=z(t)-\hat{z}(t)\) can be expressed as
The composite-observer-based (COB) PI-type controller with fuzzy rules is refined as
where \( \hat{d}_{1}(t)=\sum _{j=1}^{r}h_{j}(\theta )\left[ \begin{array}{cc} 0 &{} V_{j} \\ \end{array} \right] \hat{z}(t) \).
Substituting (13) into (9) yields
where \(D_{abj}=[-B_{a}K_{Pb},B_{a}V_{j}]\).
Combining the estimation error model (12) with the closed-loop model (14) yields
17.4 Theorem Proof via Convex Optimization Algorithm
Theorem 1
For the augmented system (15) consisting of PI control input and the disturbance observer, if there exist \(Q_{1}=P_{1}^{-1}>0\) and \(R_{1b}\) satisfying
and \(P_{2}>0\) and \(R_{2}\) satisfying
where
and \(\mu _{1}>0, \mu _{2}>0, \mu _{3}>0, \alpha _{1}>0, \alpha _{2}>0, \beta _{1}>0, \beta _{2}>0\) are known parameter. Then the augmented system (15) under the composite controller (13) is stable and the tracking error e(t) convergent to zero. The gains are given by \(K_{b}=R_{1b}Q_{1}^{-1}\) and \(L=P_{2}^{-1}R_{2}\).
Please noted that due to the limitation of the paper length, the corresponding proof of Theorem 1 is omitted.
17.5 Simulation Example
Similarly with [22], the following T-S fuzzy models are introduced to describe the simple airplane plant
\(B_{01}=[-0.1671,-10.9160]^{T}, B_{02}=[-0.2128,-19.8350]^{T}, B_{03}=[-0.2110,-32.08 13]^{T}, C_{01}=C_{02}=C_{03}=[1,1], d_{2}(t)=[0.1,0.1]^{T}sin(0.1\pi t), E_{21}=E_{22}=E_{23}=[0.1,0.1]^{T}, H=\left[ \begin{array}{cc} 1 &{} 0 \\ 0 &{} 1 \\ \end{array} \right] , F=\left[ \begin{array}{cc} sin(t)/2 &{} 0 \\ 0 &{} cos(t)/2 \\ \end{array} \right] , E_{11}=E_{12}=E_{13} =\left[ \begin{array}{cc} 0.2 &{} 0 \\ 0 &{} 0.2 \\ \end{array} \right] \).
The member functions are chosen as
where \(\sigma _{1}=\sigma _{2}=\sigma _{3}=0.8,s_{1}=-1,s_{2}=1,s_{3}=0\).
The nonlinear irregular exogenous disturbance is described by two T-S fuzzy rules, and \(W_{1}=\left[ \begin{array}{cc} -1 &{} 2 \\ -5 &{} 0 \\ \end{array} \right] , V_{1}=\left[ \begin{array}{cc} 0 &{} 4 \\ \end{array} \right] , W_{2}=\left[ \begin{array}{cc} 0 &{} -6 \\ 4 &{} 0 \\ \end{array} \right] , V_{2}=\left[ \begin{array}{cc} 0 &{} 4 \\ \end{array} \right] \).
The member functions are chosen as
where \(\sigma _{1}^{2}=0.5, \sigma _{2}^{2}=1\).
Supposed that the initial values in augmented system (10)–(11) are taken to be \(x_{0}=\left[ \begin{array}{cc} 2 &{} 3 \\ \end{array} \right] ^{T}\), \(\hat{x}_{0}=\left[ \begin{array}{cc} -2 &{} -2 \\ \end{array} \right] ^{T}\), \(w_{0}=\left[ \begin{array}{cc} 2 &{} 1 \\ \end{array} \right] ^{T}\), \(\hat{w}_{0}=\left[ \begin{array}{cc} 1 &{} 1 \\ \end{array} \right] ^{T}\).

Disturbance and its estimation

The trajectory of system output
The desired tracking objective is design as \(y_{d}=5\). Figure 17.1 displays the response of nonlinear disturbance and its observation value, which illustrates the tracking performance of the disturbance observer is satisfactory. Figure 17.2 is the trajectory of system output and the good performance dynamic tracking performance can be embodied.
17.6 Conclusion
This paper studies the anti-disturbance tracking control framework for T-S fuzzy models by using T-S disturbance modeling and disturbance observer design. The DOB PI composite controller is designed based on T-S fuzzy models and T-S fuzzy disturbance models simultaneously. As a result, a convex optimization approach is adopted to ensure the augmented closed-loop systems stable and convergence of the tracking error to zero.
References
Yang Z, Tsubakihara H (2008) A novel robust nonlinear motion controller with disturbance observer. IEEE Trans Control Syst Technol 16(1):137–147
Chen WH, Ballanceand DJ, Gawthrop PJ (2000) A nonlinear disturbance observer for robotic manipulators. IEEE Trans Ind Electron 47(4):932–938
Yang J, Li SH, Su JY, Yu XH (2013) Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances. Automatica 49(7):2287–2291
Li SH, Xia CJ, Zhou X (2012) Disturbance rejection control method for permanent magnet synchronous motor speed-regulation system. Mechatronics 22(6):706–714
Guo L, Chen WH (2005) Disturbance attenuation and rejection for systems with nonlinearity via DOBC approach. Int J. Robust Nonlinear Control 15:109–125
Guo L, Cao SY (2013) Anti-disturbance control for systems with multiple disturbances. CRC Press, Boca Raton
Liu C, Peng H (2000) Disturbance observer based tracking control. ASME J Dyn Syst Ser Control Meas 122:332–335
Guo L, Wen X, Xin X (2010) Hierarchical composite anti-disturbance control for robotic systems using robust disturbance observer. In: Robot intelligence, advanced information and knowledge processing, pp 229–243
Kempf C, Kobayashi S (1999) Disturbance observer and feedforward design for a highspeed direct drive positioning table. IEEE Trans Control Syst Technol 7(5):513–526
Kim K, Baik I, Moon G, Youn M (1999) A current control for a permanent magnet synchronous motor with a simple disturbance estimation scheme. IEEE Trans Control Syst Technol 7(5):630–633
Huang YH, Massner W (1998) A novel disturbance observer design for magnetic hard drive servo system with rotary actuator. IEEE Trans Mechatron 34:1892–1894
Wei XJ, Guo L (2009) Composite disturbance-observer-based control and terminal sliding mode control for nonlinear systems with disturbances. Int J Control 82(6):1082–1098
Yao XM, Guo L (2013) Composite anti-disturbance control for Markovian jump nonlinear systems via disturbance observer. Automatica 49(8):2538–2545
Zhang HB, Shen YY, Feng G (2007) Delay-dependent stability and \(H_{\infty }\) control for a class of fuzzy descriptor systems with timedelay. Fuzzy Sets Syst 160(12):1689–1707
Zhang HG, Yang DD, Chai TY (2007) Guaranteed cost networked control for T-S fuzzy systems with time delays. IEEE Trans Syst Man Cybern C 37(2):160–172
Yi Y, Zhang TP, Guo L (2009) Multi-objective PID control for non-Gaussian stochastic distribution system based on two-step intelligent models. Sci China-Ser F: Inf Sci 52(10):1754–1765
Qiu J, Feng G, Gao H (2011) Nonsynchronized-state estimation of multichannel networked nonlinear systems with multiple packet dropouts via T-S fuzzy-affine dynamic models. IEEE Trans Fuzzy Syst 19(1):75–90
Tseng CS (2006) Model reference output feedback fuzzy tracking control design for nonlinear discrete-time systems with time-delay. IEEE Trans Fuzzy Syst 14(1):58–70
Zhang K, Jiang B, Shi P (2012) Fault estimation observer design for discrete-time Takagi-Sugeno fuzzy systems based on piecewise Lyapunov functions. IEEE Trans Fuzzy Syst 20(1):192–200
Daniel WCH, Niu YG (2007) Robust fuzzy design for nonlinear uncertain stochastic systems via sliding-mode control. IEEE Trans Fuzzy Syst 15(3):350–358
Su XJ, Shi P, Wu LG, Nguang SK (2013) Induced L2 filtering of fuzzy stochastic systems with time-varying delays. IEEE Trans Cybern 43(4):1251–1264
Xie ZH (2000) Fuzzy controller design and stability analysis for flight control systems. Flight Dyn China 18(2):30–33
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Fan, X., Sun, Z., Yi, Y., Zhang, T. (2016). Anti-disturbance Control for T-S Fuzzy Models Using Fuzzy Disturbance Modeling. In: Jia, Y., Du, J., Li, H., Zhang, W. (eds) Proceedings of the 2015 Chinese Intelligent Systems Conference. Lecture Notes in Electrical Engineering. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-48365-7_17
Download citation
DOI: https://doi.org/10.1007/978-3-662-48365-7_17
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-48363-3
Online ISBN: 978-3-662-48365-7
eBook Packages: EngineeringEngineering (R0)