
Abstract
As in the Asian-Pacific region BDS is operational next to GPS, satellite clocks (needed for Precise Point Positioning; PPP) and satellite phase hardware biases (needed for integer ambiguity resolution enabled PPP-RTK) have been estimated from a zero baseline in Perth, Australia, and applied to dual-frequency GPS+BDS data of a single GNSS receiver at a distance of 110 km from the zero baseline. Precise orbits were obtained from the IGS (GPS) and Wuhan University (BDS). It is shown that with GPS alone the PPP solution needs on average 1 h to converge to a level of a few decimetres, whereas with BDS alone this takes on average 2.5 h, which is due to the poorer geometry of the BDS satellites in Australia. With both GPS and BDS combined this convergence time is tremendously reduced to 30 min on average. With the satellite phase biases corrected, the precision of the GPS+BDS PPP-RTK solution is at the few centimetre level.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The technique of Precise Point Positioning (PPP) relies on the availability of satellite orbit, satellite clock and—in order to limit the convergence time of the solution—ionospheric products (together with the satellite differential code biases or DCBs). Based on a long observation time (multiple hours) the position accuracy of (static) PPP can reach the level of a few centimetres. This high accuracy is within quicker reach if the PPP user incorporates corrections on the satellite hardware phase biases. Using this satellite phase bias information the PPP user is able to resolve the phase ambiguities to integer values, allowing solving his position with high, centimetre precision after ambiguity resolution. Integer ambiguity resolution enabled PPP is also referred to as PPP-AR or PPP-RTK [1]. Although PPP-RTK requires less observation time than (standard) PPP to obtain the same precision level, both techniques suffer from the presence of the ionospheric delays in the observations, slowing down the convergence of the ambiguities before they can be reliably fixed to integers. Although the need for precise ionospheric corrections remains, PPP and PPP-RTK will enormously benefit from the availability of multiple Global Navigation Satellite System (GNSS) constellations. These additional constellations will bring an enormous increase in number of satellites and signals, as compared to one constellation, such as GPS, and will be very beneficial for the performance of positioning techniques, such as PPP, RTK and PPP-RTK.
In the Asian-Pacific region the Chinese BeiDou satellite System (BDS) is operational since 2012. This regional constellation consists of 5 Geostationary Earth Orbiting (GEO) satellites, 5 Inclined Geo-Synchronous Orbiting (IGSO) satellites, as well as 4 Medium Earth Orbiting (MEO) satellites. Full global operational capability of BDS is expected by 2020. An example of the ground tracks of the BDS satellites (as observed from a receiver at Curtin University in Australia) is depicted in Fig. 52.1. Results of PPP based on real data of the BDS combined with GPS and other constellations are presented in several publications, among others [2–4], while relative positioning results (RTK; short and long baselines) are presented in, among others, [2, 5, 6]. In this chapter we will present results of PPP as well as PPP-RTK based on BDS+GPS data collected near Perth in Western Australia. This chapter is set up as follows. Section 52.2 presents the observation models underlying PPP and PPP-RTK. Section 52.3 shows results of both positioning techniques, for GPS alone, BDS alone, as well as GPS+BDS combined. Finally, Sect. 52.4 presents the conclusions.

Example of the ground tracks of the BDS satellites as observed from station CUT (Curtin University) in Perth, Australia. The 5 GEO satellites are (almost) stationary above the equator, whereas the 5 IGSO satellites follow an ‘8’ shaped ground track
2 PPP and PPP-RTK Models
The between-satellite differenced, linearized GNSS code and carrier-phase observation equations on frequency j read, for receiver r and satellite pair \( p - s \) [1]:
Here \( E( \bullet ) \) denotes the expectation, p the code and \( \phi \) the phase observables (both expressed in meter), \( \rho \) the receiver-satellite range combined with the tropospheric delay (in meter), c the speed of light (meter/second), dt the satellite clock error (in second), d the satellite code bias (in second), \( \delta \) the satellite phase bias (in second), \( \iota \) the ionospheric delay (in meter), \( \mu_{j} = \lambda_{j}^{2} /\lambda_{1}^{2} \) the frequency-dependent ionospheric coefficient with \( \lambda_{j} \) the wavelength (in meter), and z the integer carrier-phase ambiguity (in cycle). Due to the between-satellite differencing any receiver-specific parameters are eliminated.
In case of PPP and PPP-RTK the above observation equations are linearized with respect to the unknown receiver position. For this the satellite positions are needed, which in case of GPS are provided by the International GNSS Service in the form of precise IGS orbits [7]. For BDS the precise WUM orbits provided by Wuhan University [8] are used. Both these orbit products are given in the same reference frame (IGS08), so there is no need to transform them to a common reference frame. In addition to these precise satellite orbits, both PPP and PPP-RTK rely on the availability of precise satellite clocks. These are provided as ionosphere-free satellite clocks, which are interpreted as [1]:
Here the ionosphere-free clock is denoted using a tilde on top, as to distinguish it from the true satellite clock. Note that \( DCB^{ps} = d_{1}^{ps} - d_{2}^{ps} \) denotes the Differential Code Bias, i.e. the difference between the satellite code biases on two frequencies, which is pre-multiplied by the ionosphere-free coefficient \( \tfrac{{\mu_{j} }}{{\mu_{2} - \mu_{1} }} \). In case of GPS the ionosphere-free clock products are based on the L1 and L2 frequencies (i.e. the P1 and P2 code), for which these coefficients are \( \tfrac{{\mu_{1} }}{{\mu_{2} - \mu_{1} }} = 1.546 \) and \( \tfrac{{\mu_{2} }}{{\mu_{2} - \mu_{1} }} = 2.546 \). For BDS the coefficients are based on the B1 and B2 frequencies, for which they read \( \tfrac{{\mu_{1} }}{{\mu_{2} - \mu_{1} }} = 1.487 \) and \( \tfrac{{\mu_{2} }}{{\mu_{2} - \mu_{1} }} = 2.487 \).
Correcting the code and phase observations for the above clock products yields the following dual-frequency (\( j = 1,\;2 \)) observation equations for PPP:
To solve for the receiver position, the above observation equations are linearized. It is remarked that, besides the satellite clocks, the observations are also corrected for errors due to troposphere, phase windup, relativity, tides, ocean loading, etc. In addition, if in case of GPS the C/A code data are used, a correction needs to be applied for the C/A-P1 code bias. If needed, a zenith tropospheric delay (ZTD) is modelled as unknown parameter. In this chapter it is assumed that the observations are not corrected for ionospheric delays. As consequence, the ionospheric delays are unknown parameters of the model, which get biased by the DCBs coming from the clock product. This means that the ionospheric delay biased by the DCB, denoted as \( \tilde{\iota }_{r}^{ps} \) becomes an additional estimable parameter in the observation model. This parameter could be eliminated by taking the ionosphere-free observation combination, however in this chapter we solve for the uncombined observation equations. In addition to this ionospheric parameter, the corrected phase observation equation has another estimable parameter, which is the phase ambiguity, denoted as \( \tilde{z}_{r,j}^{ps} \), which not only consists of the true ambiguity, but is biased by a combination of satellite phase and code biases. Because these phase and code biases cannot be separated from the ambiguity \( z_{r,j}^{ps} \), integer ambiguity resolution is not possible. This is the well-known situation for standard PPP.
The information that is missing in order to resolve the ambiguities as integer, are satellite phase biases. Like the satellite clocks, these cannot be provided as unbiased phase biases, but only biased by other terms. In this chapter we assume them to be provided having the following interpretation [1]:
It can be seen that the first three terms in this expression exactly correspond to the bias term in the estimable PPP ambiguity in (52.3). However, there is an additional term, i.e. \( z_{1,j}^{ps} \), which is the between-satellite differenced ambiguity of the pivot receiver (denoted using subscript 1) in the reference network that is providing the satellite phase bias product. Correcting the phase observations for these satellite phase biases yields the following (PPP-RTK) observation equations (\( j = 1,\;2 \)):
Because of the satellite phase bias correction, the estimable ambiguity parameter \( \tilde{z}_{r,j}^{ps} \) now only consists of integer ambiguity terms. In fact, it is estimable as a double-differenced ambiguity, with respect to the network’s pivot receiver, and therefore automatically estimable as an integer. Thus, although the corrected observation equations for PPP in (52.3) and PPP-RTK in (52.5) will result in exactly identical models, the phase corrections and therefore the interpretation of the estimable ambiguities are completely different. The PPP-RTK model is usually solved in three steps, with the first step the ambiguity-float solution. The positioning solution of this first step is identical to the standard PPP solution. In the second step, the integer ambiguities are resolved by means of the standard LAMBDA method [9], whereas in the third step these ambiguities are held fixed (ambiguity-fixed).
In case GPS and BDS data are processed together, the code/phase observation equations of both constellations are solved together, having the receiver position (plus optionally ZTD) as common parameters. As GPS and BDS do not have identical frequencies, it is not needed to parameterize inter-system biases as additional parameters. This means that for each constellation a constellation-specific pivot satellite should be selected, in order to perform the between-satellite differencing.
3 Some PPP and PPP-RTK Results for GPS and BDS
In this section we present results for PPP as well as PPP-RTK based on real GPS+BDS data. This is done for the multi-GNSS Septentrio PolaRx4 receiver set up in New Norcia (NNOR), Australia, which is part of the Multi-GNSS Experiment (MGEX) network. As satellite phase biases for BDS data are not yet produced on a global level, the satellite clocks as well as satellite phase biases for both GPS and BDS that are needed to perform PPP and PPP-RTK are estimated from a zero baseline setup at Curtin University in Perth, Australia tracking data of both constellations.
The zero baseline is formed by two multi-GNSS Trimble NetR9 receivers (i.e. CUT0 and CUT2), connected to one common antenna. Figure 52.2 (left) depicts a map of a part of Western Australia showing the locations of CUT0/CUT2 and NNOR. The distance between CUT0/CUT2 and NNOR is about 110 km. The GNSS data that are used were collected during the full day of 14 December 2013. Table 52.1 presents some information on the data collected.

Map showing the locations of the multi-GNSS stations CUT0/CUT2 and NNOR in Western Australia (left) versus sky plot of the tracked BDS satellites in NNOR on 14 December 2013 (right)
The GPS and BDS satellite clock and phase biases determined by the zero baseline CUT0/CUT2 are in a next step applied to correct the data of NNOR. In addition, as these corrections are determined by Trimble receivers, while the receiver in NNOR is of another type (Septentrio), the BDS phase data corresponding to the GEO satellites are corrected by 0.5 cycle to account for the Inter-Satellite-Type Biases that are known to occur between the GEO and the IGSO/MEO BDS satellites in case of mixed (Septentrio-Trimble) receiver combinations [10].
Figure 52.3 (left) shows the number of GPS and BDS satellites that are tracked above the selected 15° cut-off elevation. It can be seen that the number of satellites varies between 4 and 10 during the day, whereas the number of BDS satellites varies between 6 and 10. The combined number of satellites varies between 10 and 19. Although the number of BDS satellites is comparable to the number of GPS satellites, their geometry is generally less favorable for positioning in Australia, as can be seen from their PDOP values in Fig. 52.3 (right). During the day the BDS PDOPs are much larger than for GPS, apart from a period during the beginning of the day. The worse BDS geometry can also be inferred from Fig. 52.2 (right), which shows a sky plot of the BDS satellites that are tracked at NNOR during the day. It can be seen that there is almost no satellite coverage in the East direction. However, one has to take into account that the BDS constellation is not yet final, as there will be many more MEO satellites launched the coming years.

Number of GPS and BDS satellites and combined tracked in NNOR on 14 December 2013 (left) versus PDOP values for this day, based on GPS-only, BDS-only and GPS+BDS (right)
Concerning integer ambiguity resolution in case of PPP-RTK, we decided not to resolve the ambiguities of the BDS GEO satellites, but to keep them float instead. This decision, which was also taken in [5], is motivated by the fact that the receiver-satellite geometry for these (almost) stationary satellites is barely changing and therefore it is very difficult to resolve these ambiguities using a model that includes ionospheric parameters as well. Other reasons for not including the GEO satellites in the ambiguity resolution are that the quality of its orbits is worse than of the other satellites and multipath effects are not averaged out over time [11].
As precise coordinates are available for the NNOR receiver, these will be used as ground-truth to assess the position errors obtained with PPP and PPP-RTK. To assess the performance of the PPP-RTK integer ambiguity resolution, the ratio test with a fixed failure rate of 0.001 [12] is executed to assess whether the integer solution obtained with LAMBDA can be accepted with sufficient confidence. In addition, a ground-truth for the integer ambiguities is computed as well, by solving the full day of data in a Kalman filter, keeping the ambiguities constant in time. This ground-truth solution is used to compute for every epoch of the day the time that is needed to obtain this correct integer solution, i.e. the ambiguity convergence time, also known as the time-to-fix-the-ambiguities (TTFA).
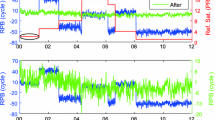
Figure 52.4 shows the TTFA during the day, for three cases: (i) GPS-only, (ii) BDS-only and (iii) GPS+BDS. The TTFAs in Fig. 52.4 (left) are computed using a Kalman filter that introduces a receiver position for every epoch that is not connected in time (“kinematic” mode), whereas the TTFAs in Fig. 52.4 (right) are based on positions that are kept constant in time (“static” mode).

Time-to-Fix-the-Ambiguities (TTFA) for single-receiver integer ambiguity resolution of receiver NNOR, based on GPS+BDS, GPS-only as well as BDS-only, solving the receiver position in kinematic mode (left) and in static mode (right)
With respect to the results in Fig. 52.4, the TTFAs are significantly worse for BDS in standalone mode as compared to GPS alone, which is due to the relatively low number of BDS ambiguities that are resolved (as the GEO ambiguities are kept float), in combination with a poor BDS geometry (see Fig. 52.3, right). Despite this, the combination of BDS with GPS turns out to be very favorable: in kinematic mode the TTFA of GPS+BDS (29 min) is still only half the time of GPS alone (64 min). Although this effect is less pronounced in static mode (GPS alone: 37 min vs. GPS+BDS: 25 min), there is still gain in combining the two constellations.
Based on the TTFAs, Figs. 52.5, 52.6 and 52.7 show the horizontal scatters as well as the vertical time series of the position errors of NNOR, estimated in the kinematic mode. Shown are the positions based on the ambiguities held float, as well as held fixed (after integer ambiguity resolution), and since these scatters and time series are based on the same number of epochs (i.e. the TTFA), they are directly comparable. The ambiguity-float positions can be considered as standard PPP results, whereas their ambiguity-fixed counterparts represent results of PPP-RTK. Based on an average TTFA of 64 min for GPS only, the float horizontal precision is at the level of a few decimeters, whereas after ambiguity fixing this is at the 1 cm level horizontally and 5 cm vertically. In case of BDS alone, the float horizontal precision is comparable to GPS, however the BDS positioning results are based on a much larger average TTFA than for GPS, benefitting the float results. The BDS-only fixed results are based on the instantaneous BDS geometry and almost a factor 3 worse than of GPS, up to a standard deviation of 12 cm in height. The positioning results for GPS+BDS combined are very similar to that of GPS only. One has however to realize that the ambiguity-float solution is based on a much shorter average TTFA, which is 29 min for GPS+BDS, versus 64 min for GPS alone.

Horizontal position scatter (top) and vertical position time series (bottom) for station NNOR based on GPS only data: ambiguity-float (left) versus ambiguity-fixed (right)

Horizontal position scatter (top) and vertical position time series (bottom) for station NNOR based on BDS only data: ambiguity-float (left) versus ambiguity-fixed (right)

Horizontal position scatter (top) and vertical position time series (bottom) for station NNOR based on GPS+BDS data: ambiguity-float (left) versus ambiguity-fixed (right)
4 Conclusions
Standard PPP and integer ambiguity resolution enabled PPP (PPP-RTK) will benefit in presence of new GNSSs, as more observations of more satellites will significantly strengthen the underlying positioning models. This benefit is mainly felt in a decrease of convergence time or time-to-fix-the-ambiguities (TTFA) when observations of multiple constellations are combined. In this chapter it has been demonstrated that combining dual-frequency GPS with dual-frequency BDS data for a single receiver Australia, where BDS is regionally operational, the TTFA for PPP-RTK ambiguity resolution is reduced from 64 min in case of GPS only to 29 min for GPS+BDS. The resulting precision based on the fixed ambiguities is at the 1 cm level for the horizontal position components and 5 cm in vertical direction.
References
Odijk D, Teunissen PJG, Zhang B (2012) Single-frequency integer ambiguity resolution enabled GPS precise point positioning. J Surv Eng 138:193–202
Shi C, Zhao Q, Li M, Tang W, Hu Z, Lou Y, Zhang H, Niu X, Liu J (2012) Precise orbit determination of BeiDou satellites with precise positioning. Sci China Earth Sci 55(7):1079–1086
Li M, Qu L, Zhao Q, Guo J, Su X, Li X (2014) Precise point positioning with the BeiDou navigation satellite system. Sensors 14:927–943
Tegedor J, Ovstedal O, Vigen E (2014) Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J Geodetic Sci 4:65–73
Odolinski R, Teunissen PJG, Odijk D (2015) Combined GPS+BDS for short to long baseline RTK positioning. Published in the mean time. Measurement Science and Technology. doi:10.1088/0957-0233/26/4/045801
Wang M, Cai H, Pan Z (2015) BDS/GPS relative positioning for long baseline with undifferenced observations. Adv Space Res 55:113–124
Dow JM, Neilan RE, Rizos C (2009) The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J Geodesy 83:191–198
Zhao Q, Guo J, Li M, Qu L, Hu Z, Shi C, Liu J (2013) Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J Geodesy 87(5):475–486
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer estimation. J Geodesy 70:65–82
Nadarajah N, Teunissen PJG, Sleewaegen JM, Montenbruck O (2014) The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solutions. doi:10.1007/s10291-014-0392-6
Wang G, de Jong K, Zhao Q, Hu Z, Guo J (2015) Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solutions 19:129–139
Verhagen S, Teunissen PJG (2013) The ratio test for future GNSS ambiguity resolution. GPS Solutions 17:535–548
Acknowledgments
This work has been done in the context of the Positioning Program Project 1.01 “New carrier phase processing strategies for achieving precise and reliable multi-satellite, multi-frequency GNSS/RNSS positioning in Australia” of the Cooperative Research Centre for Spatial Information (CRC-SI). The third author is the recipient of an Australian Research Council (ARC) Federation Fellowship (project number FF0883188). Mr. Robert Odolinski is acknowledged for creating Fig. 52.1.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Odijk, D., Zhang, B., Teunissen, P.J.G. (2015). Multi-GNSS PPP and PPP-RTK: Some GPS+BDS Results in Australia. In: Sun, J., Liu, J., Fan, S., Lu, X. (eds) China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume II. Lecture Notes in Electrical Engineering, vol 341. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-46635-3_52
Download citation
DOI: https://doi.org/10.1007/978-3-662-46635-3_52
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-46634-6
Online ISBN: 978-3-662-46635-3
eBook Packages: EngineeringEngineering (R0)