
Abstract
This paper proposes a method of Earth polar motion parameters prediction by dual differential least-squares (LS) and autoregressive (AR) model. Firstly, polar motion parameters are processed by dual differential method, the stationarity of polar motion parameters is improved. Then, LS+AR method is utilized to analyze the dual differential polar motion parameters to obtain the preliminary prediction results. Finally, the preliminary prediction results are processed by inverse dual differential method to obtain high accuracy polar motion prediction results. The prediction results are compared with EOP prediction comparison campaign (EOP_PCC) results, it shows that the short-term polar motion parameters prediction error is at the same level of EOP_PCC. The one day prediction accuracy of PMX is at the level of 0.25 mas, PMY is 0.2 mas, they are better than EOP_PCC one day polar motion prediction accuracy.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Earth orientation parameters
- Polar motion parameters prediction
- Dual differential
- Least-squares
- AR model
1 Introduction
High accuracy Earth orientation parameters (EOP) is the basic parameters for conversion between the International Celestial Reference Frame (ICRF) and the International Terrestrial Reference Frame (ITRF) [1].
EOP has been monitored with increasing accuracy by advanced space-geodetic techniques, including lunar and satellite laser ranging (SLR), very long baseline interferometry (VLBI) and Global Navigation Satellite System(GNSS), etc. [2, 3]. The high accuracy EOP is essential for manned space flight and deep space exploration mission, especially for the real time and high accuracy navigation mission. EOP is usually available with a delay of hours to days, thus, EOP prediction is adapt to the growing demands for spacecraft navigation and physical geography science research.
Polar motion prediction, UT1-UTC prediction, and length of day (LOD) prediction are the hot research on EOP prediction. Many methods have been developed and applied to EOP predictions, such as LS extrapolation [4], LS extrapolation and AR prediction (LS+AR) [5], networks prediction [6], spectral analysis and least-squares extrapolation [7], wavelet decomposition and auto-covariance prediction [8], etc.
The Earth orientation parameters prediction comparison campaign (EOP_PCC) that started in 2005 was organized for the purpose of assessing the accuracy of EOP predictions. By contrast, LS+AR prediction method is one of the highest accuracy prediction methods. However, when LS+AR prediction method is utilized, the key problems are the selection of parameters in LS extrapolation, the best order determination in AR model, AR prediction of non-stationary EOP series, etc.
At present, the existing LS+AR prediction method in the study of data stationary requirements is lack. To a certain extent, this will affect the EOP prediction accuracy more or less.
This paper researches polar motion parameters prediction starting with data’s stationary analysis, and proposes dual differential LS+AR prediction method to obtain high accuracy polar motion parameters short-term prediction results.
2 Theoretical Method
2.1 Least-squares
Least-squares model of polar motion prediction is shown in Formula (7.1), it contains linear term and periodic term. The periodic term contains Chandler wobbles, annual, half of a year, third of a year, etc.
where, \( t \) is UTC time (unit is year). \( A,B,C,D_{1} ,D_{2} ,E_{1} ,E_{2} , \ldots \)are the fitting parameters, \( p_{1} ,p_{2} , \ldots \) are the fitting periods, which could be determined by prior experience.
2.2 AR Model
For a stationary sequence \( x_{t} (t = 1,2, \ldots ,N) \), the AR model is expressed as follows
where \( \varphi_{1} ,\varphi_{2} , \ldots ,\varphi_{p} \) are model parameters, a t is white noise, p is model order. Formula (7.2) is called p order AR model, denoted by AR(p). \( a_{t} \sim N\left( {0,\sigma_{n}^{2} } \right) \), \( \sigma_{n}^{2} \) is the variance of the white noise.
The key technique of AR model is determining model order parameter p. There are many criterions which can be utilized for determining the model order parameter p, such as Final Prediction Error Criterion (FPE), Akake Information Criterion (AIC), Singular Value Decomposition (SVD) criterion, etc.
This study utilizes FPE for determining AR model order. FPE criterion function is as follows.
2.3 Prediction Error Estimates
In order to evaluate prediction error, Mean absolute error (MAE) is utilized as the prediction accuracy index shown as follows.
where o is the real observation, p is prediction value, i is prediction day, n is prediction number.
3 Dual Differential LS+AR Prediction Process
The process of the dual differential LS+AR polar motion parameters prediction is shown in Fig. 7.1.

Dual differential LS+AR prediction process
4 Calculation and Analysis
Polar motion parameters come from IERS website for prediction and accuracy verification. EOP 05C04 data is selected for comparing with EOP_PCC results. The analyzed data is from January 1, 2000 to December 31, 2009. One day has one polar motion parameter. The basic polar motion sequences are from January 1, 2000 to December 31, 2007. Dual differential LS+AR method is utilized to predict polar motion parameters from January 1, 2008 to December 31, 2009. And the polar motion parameters prediction values are compared with the real observation values. The prediction days are from 1 to 30 days, the prediction number is 731 (corresponding to two years). The prediction results are shown as follows.
Figure 7.2 shows the original polar motion component X orientation (PMX) from 2000 to 2009. Figure 7.3 shows the direct LS fitting result of PMX from 2000 to 2009. In Fig. 7.3, it can be found that the residual after LS fitting shows obvious fluctuation, and it is non-stationary. Thus, this study utilizes dual differential method for preliminarily processing polar motion parameters, then LS method is utilized to fit the differential polar motion parameters, the results are shown in Fig. 7.4. It shows that the differential results are more stationary.

PMX of from 2000 to 2009

LS fitting result of PMX from 2000 to 2009

LS fitting result of PMX dual differential from 2000 to 2007
In the same way, PMY from 2000 to 2009 is shown in Fig. 7.5. The LS fitting dual differential PMY results are shown in Fig. 7.6.

PMY from 2000 to 2009

LS fitting result of PMY dual differential from 2000 to 2007
Then, utilizing LS extrapolation, residual AR prediction and inverse dual differential, the one day polar motion prediction value can be obtained. In the same way, different prediction days prediction value can be obtained. The prediction number is 731 (corresponding to two years). MAE is utilized to evaluate the prediction accuracy, and the result is shown in Table 7.1.
Earth Orientation Parameters Prediction Comparison Campaign attracted 12 participants coming from 8 countries, who are the top professors or scholars in the time sequence analyzing filed. EOP_PCC referenced to more than 20 prediction methods. EOP_PCC contains the ultra short term (predictions to 10 days into the future), short term (30 days), and medium term (500 days) predictions.
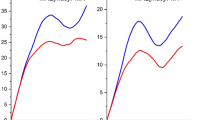
This paper compared our results (BACC results) with EOP_PCC results in ultra short term prediction and short term prediction. Figure 7.7 shows the EOP_PCC results, Fig. 7.8 shows the BACC results.

EOP_PCC prediction results of polar motion

BACC prediction results of polar motion
By comparison, BACC prediction results of polar motion are at the same level as EOP_PCC. According to one day prediction accuracy, BACC one day polar motion prediction accuracy is better than EOP_PCC. In BACC prediction, one day prediction error of PMX is at the level of 0.25 mas, PMY is at the level of 0.2 mas. EOP_PCC polar motion minimum one day predictions error is at the level of 0.5 mas for PMX, 0.35 mas for PMY [1].
5 Conclusion
The paper proposes dual differential LS+AR prediction method for polar motion prediction. The Earth polar motion parameters from IERS are utilized for prediction by dual differential LS+AR method. By comparison, this paper’s prediction accuracy is at the same level as EOP_PCC in ultra short term prediction and short term prediction. The one day prediction error of PMX is at the level of 0.25 mas, PMY is at the level of 0.2 mas in our study, this is better than EOP_PCC result. In the following work, the proposed prediction method can be used to UT1-UTC and LOD prediction.
References
Kalarus M, Schuh H, Kosek W et al (2010) Achievements of the earth orientation parameters prediction comparison campaign. J Geodyn 62:587–596
Karbon M, Nilsson T, Schuh H (2013) Determination and prediction of EOP using Kalman filtering. Geophys res 15
Xu XQ, Zhou YH (2010) High precision prediction method of earth orientation parameters. J spacecraft TT&C technol 29(2):70–76
Xu X, Zhou Y, Liao X (2012) Short-term earth orientation parameters predictions by combination of the least-squares, AR model and Kalman filter. J Geodyn 62:83–86
Guo JY, Li YB, Dai CL et al (2013) A technique to improve the accuracy of earth orientation prediction algorithms based on least squares extrapolation. J Geodyn 70:36–48
Wang QJ, Liao DC, Zhou YH (2008) Real-time rapid prediction of variations of earth’s rotational rate. Chin Sci Bull 53:969–973
Akulenko LD, Kumakshev SA, Rykhlova LV (2002) A model for the polar motion of the deformable earth adequate for astrometric data. Astron Rep 46:74–82
Kosek W, Kalarus M, Johnson TJ et al (2005) A comparison of LOD and UT1-UTC forecasts by different combination prediction techniques. Artif Satell 40:119–125
Acknowledgments
We thank the International Earth Rotation and Reference Systems Service (IERS) for providing the EOP data.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Chen, L. et al. (2015). Earth Polar Motion Parameters High Accuracy Differential Prediction. In: Shen, R., Qian, W. (eds) Proceedings of the 27th Conference of Spacecraft TT&C Technology in China. Lecture Notes in Electrical Engineering, vol 323. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-44687-4_7
Download citation
DOI: https://doi.org/10.1007/978-3-662-44687-4_7
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-44686-7
Online ISBN: 978-3-662-44687-4
eBook Packages: EngineeringEngineering (R0)