
Abstract
We reprocessed DORIS for all of 2010, using the latest model and strategy improvements to estimate Zenith Tropospheric Delays (ZTDs), as well as tropospheric horizontal gradients for about 60 ground stations. These results were compared to recent GPS-based estimates obtained at the Jet Propulsion Laboratory (JPL). After discussing some of the data processing options and current limitations of the DORIS data, we show that the DORIS-GPS comparisons possess a high degree of correlation (average being 0.97), and that total zenith delay estimates from the two techniques agree at the 3 mm level on average with 8.6 mm total RMS, with better results being obtained when a 5° elevation cutoff angle is used for DORIS. While these DORIS results cannot be used for real-time weather prediction, they could contribute to scientific investigations for climatology, thanks to the homogenous tracking network of the DORIS system, as well as the long-term history of the observation time series.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
While DORIS data have been used for years for Precise Orbit Determination (POD, Cerri et al. 2010; Lemoine et al. 2010) and Geodesy, only a few groups have tried to generate sufficiently long time series of DORIS tropospheric estimation (Willis et al. 2007a; Stepanek et al. 2010). These results were compared either during intensive campaigns such as CONT05 (Snadjrova et al. 2006) or CONT08 (Teke et al. 2011), showing small but regular improvements in data processing, or for long period of times (Bock et al. 2010), looking for possible biases relative to GPS estimation. More recently, additional parameters, such horizontal gradients (Bar-Sever et al. 1998), were derived when using the DORIS data (Flouzat et al. 2009; Willis et al. 2012) and compared to GPS estimations during a limited period of time. The goal of this paper is to present the latest tropospheric results obtained at the Institut national de l’information géographique et forestière (IGN, France) and to discuss their current accuracy, using direct comparisons with GPS data at most co-located sites in 2010.
We will first present some key aspects of the DORIS system and show how these observations can contribute to atmospheric sciences and climatology, but not yet to weather prediction (see discussion after). We will then describe our strategy to obtain zenith tropospheric delays and horizontal tropospheric gradients using DORIS and GPS techniques. After describing the method used, we will discuss the results of our inter-comparisons.

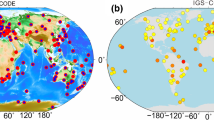
DORIS/GPS co-located stations in 2010 selected in this study (acronyms correspond to DORIS stations).
2 DORIS Data
The DORIS system (Doppler Orbitography and Radiopositioning Integrated by Satellite) provides observations since the launch of the SPOT-2 satellite in 1990. However, best results are obtained after 1993, when two or more satellites are used (Williams and Willis 2006; Willis 2007). These data are easily accessible through data centers at IGN and at NASA/CDDIS (Noll 2010) through the International DORIS Service (IDS, Tavernier et al. 2002; Willis et al. 2010a).
This system is based on a permanent tracking network of about 60 beacons, transmitting radio-electrical signals at 2 GHz and 400 MHz from ground (uplink system). About half of these DORIS stations are co-located with other space geodesy equipment (VLBI, Satellite Laser Ranging, or GNSS). Figure 1 displays the 33 co-location sites that were used in this study, where the DORIS antenna is sufficiently close to the GPS antenna (less than 200 m difference in height).
It is important to notice that unlike GPS receivers, there are only two types of DORIS ground antennas: Alcatel and Starec. The Starec antennas have progressively replaced the Alcatel antennas, and now operate at all sites (Fagard 2006). As POD is the major application of the DORIS system, ground tracking stations were very rarely moved, allowing continuity of observation over long periods of time and consequently making DORIS results valuable for global monitoring (Altamimi et al. 2005; Nocquet et al. 2006; Willis et al. 2006; Argus et al. 2010). Until now very few studies investigated possible phase center offsets for DORIS antennas and none were yet able to demonstrate any significant error from the manufacturer specifications (Willis et al. 2005b, 2007b).
We restricted our study to 1 year and selected 2010, as 5 DORIS satellites could be used: SPOT-4, SPOT-5, Envisat, Jason-2, all observed during the full year, and Cryosat-2 for half a year (only after May 30, 2010). DORIS data from the Jason-1 satellite were disregarded, due to a large sensitivity to radiation of the onboard clock when crossing the South Atlantic Anomaly (SAA), as discussed in Willis~et~al. (2004), even after removing a correction model developed by Lemoine and Capdeville (2006).
Compared to GPS, there are two important differences for the DORIS data: first of all, these data are only available to users after about 4 weeks, making these data totally useless for real-time applications such as weather prediction. Unlike GPS, DORIS does not possess a constellation of satellites as such. The number of available DORIS satellites fluctuates with time (from 2 in 1993 up to 6 as of mid 2011) and is far less numerous than GNSS. Furthermore, the DORIS satellites usually orbit at lower altitude (800 and 1,300 km), while GNSS satellites orbit at much higher orbits (around 20,000 km). Consequently, the DORIS tracking stations do not provide continuous observations of several satellites simultaneously, but only a few data points during satellite passes. Simultaneous DORIS observations from two satellites from the same ground tracking site are rare events. Figure 2 provides an estimation of the total observation time per day (using one or more DORIS satellites) for two specific days: July 14, 2007 and July 14, 2010.
Figure 2 shows that the DORIS stations are only observed 7–15 % in 2007, but 15–35 % in 2010. This significant increase can be attributed to the two more recent satellites (Jason-2 and Cryosat-2, launched respectively on June 15, 2008 and April 8, 2010). Thanks to their new multi-channel technology, the DG-XX digital receivers onboard these satellites provide a larger amount of data thanks to the seven parallels channels, especially for satellite observations at low elevation (Auriol and Tourain 2010). More observations are also available for higher latitude stations, due to the DORIS sun-synchronous (almost polar) satellites (Williams and Willis 2006).

Daily percentage of DORIS observation time available by station, sorted by latitude. As for (a) July 14, 2007 (left) and (b) July 14, 2010 (right)
For this study, we reprocessed the 2010 DORIS data, adopting a multi-satellite approach and making full use of the latest improvements in DORIS data processing at IGN using the GIPSY/OASIS software package (Willis et al. 2010b). In particular: resubmitted Jason-2 and Cryosat-2 data were used (DORISMail #0770); atmospheric drag parameter was estimated once per hour for the lowest satellites around 800 km, during geomagnetic storms and outside (Willis~et~al. 2005a; Gobinddass et al. 2010); solar radiation pressure coefficient was held fixed to empirical values derived using long DORIS data spans (Gobinddass et al. 2009a, b); a~problem only related to SPOT-5 data over the SAA (Stepanek~et~al. 2010) was mitigated by disregarding DORIS data from this satellite over South America. We also improved our processing strategy by fixing station coordinates to their proper value after displacement, instead of using the first “occupation” of this station. This is important for stations that were impacted by nearby Earthquakes, such as Arequipa (Perfettini et al. 2005), Fairbanks (Eberhart-Phillips et al. 2003), Santiago (Vigny~et~al. 2011). A detailed list of these rare events can be found in Willis et al. (2009).
DORIS data were processed on a daily basis, estimating all satellite orbits and clocks as well as tropospheric parameters for ground stations. Station coordinates were held fixed to our internal tf_110726a solution [positions and velocities derived using the full DORIS data set since 1993.0, and aligned to ITRF2008 (Altamimi et al. 2011)]. We only use ITRF2008 to estimate the best estimates of the 7-parameters for each weekly station coordinate solution. However, our DORIS solution contains all available DORIS data and is corrected for discontinuities that may have appeared after the computation of ITRF2008 (e.g. Santiago, which was affected by the large Chile Earthquake on 27-FEB-2010 of magnitude 8.8). More details about this procedure is described in Willis et al. (2010b).
Several days (43 out of 365) were rejected due to large residuals. This problem is now properly understood and will be corrected in future solutions. It corresponds to an improper parameterization due to an erroneous Fortran namelist for options. Several parameters (including clock and zenith tropospheric delays) were not properly reset at start of passes and were assumed to be constant over long period of time, exceeding by far the specification of the DORIS instruments (in particular, the oscillator stability).
For every DORIS station, a Wet Zenith Delay was estimated several times per day, while the Dry Zenith Delay was held fixed to an a priori value based on the altitude of the station using a simple formula. This simplified formula could introduce some bias in the ZTD estimation, as demonstrated by Tregoning and Herring (2006). Our current strategy could then be improved in future data processing by using the GPT model as a priori for the dry troposphere (Boehm~et~al. 2007). To avoid estimating parameters when no data is available, tropospheric delays were only estimated at the start of satellite passes (but not more frequently than every 20 min when multiple satellites are available) or every 20 min (for longer satellite passes). The tropospheric delay is assumed constant over 20 min. We should emphasize here that DORIS ZTDs are not estimated by satellite pass (as~done by most other IDS Analysis Centers), as such parameter should, by definition, be station-dependent and not satellite-dependent. We used the hydrostatic and wet GMF mapping functions (Boehm et al. 2006). The DORIS ZTD estimates with formal uncertainties larger than 7 mm (usually related to lack of observations) were rejected before further use in the inter-comparison exercise. Two parameters per day were also estimated (North and East) for horizontal tropospheric gradients to account for potential asymmetry in the lower atmosphere.
3 GPS Data
We used the IGS combined tropospheric solutions (Byun and Bar-Sever 2009), generated by JPL’s GIPSY-OASIS software package in a Precise Point Positioning (PPP) mode (Zumberge et al. 1997). The GMF tropospheric mapping function was employed (Boehm et al. 2006), and the elevation cut-off angle was set to 7°. The three tropospheric parameters (1 Wet Zenith Delays and 2 horizontal gradients) were estimated at 5-min interval as random-walk parameters. Phase Center Variation (PCV) maps were used from IGS calibration model igs05.atx (Schmid et al. 2007), making results compatible de facto with ITRF2005 (Altamimi et al. 2007). It is noteworthy to mention that the production of the IGS combined tropospheric solutions recently transitioned to the United States Naval Observatory (USNO), using a different software package and estimating tropospheric parameters as a constant piece-wise linear parameter. Tests were carried out between JPL and USNO to verify the good agreement between these two types of GPS solutions.
From the hundreds of GPS stations in this reprocessed solution, we only selected the ones in co-location with the DORIS beacons. The 5-min sampled GPS ZTD series were first decimated to 15-min interval, without any smoothing. The GPS ZTD estimates were also selected based on their formal uncertainties, with a maximum acceptance threshold of 10 mm.

Upper plot: example of ZTD estimates at Greenbelt site from DORIS (station greb) and GPS (station GODE) for year 2010. Lower plot: difference of ZTD estimates (DORIS − GPS). Unit are days of year (in 2010) for the X-axis and m for the Y-axis

(a) Mean ZTD from DORIS (unit m), (b) mean difference (DORIS ZTD minus GPS ZTD; unit mm), (c) standard deviation of difference (unit mm), (d) linear correlation coefficient, for the 41 sites observed in 2010. DORIS data were processed with a cutoff angle of 10° and estimation of a set of gradient parameters per day. Acronyms correspond to DORIS stations

(a) East–west gradient, (b) North–south gradient, DORIS station greb (in red) vs. GPS station GODE (in blue); DORIS processing procedure: 1 gradient/day, 5° cutoff; GPS processing procedure: 1 gradient/5 min (here averaged over 1 h), 7° cutoff
4 GPS/DORIS ZTD Inter-comparison Procedure
The method is the same as described by Bock et al. (2010). DORIS ZTD estimates were corrected for any difference in height between the DORIS and GPS antennas to provide equivalent estimates at the same altitude (10 m of difference in height corresponds on average to ∼2.3 mm in ZHD and ∼0.65 mm in ZWD). Both hydrostatic and wet components of the differential tropospheric delay were corrected using the Saastamoinen model (Saastamoinen 1973) applied to atmospheric parameters (pressure, temperature and humidity) extracted from ECMWF reanalysis (ERA-interim; Dee~et~al. 2011). The atmospheric parameters were bilinearly interpolated from the four nearest grid points. Station pairs with difference in heights larger than 200 m were discarded (e.g. mahb and SEY1). Among the data retained, the largest difference in heights was 145.5 m (between hbmb and HRAO).
In a first step, we searched for possible outliers by inspecting the GPS and DORIS ZTD time series and their differences for all co-location pairs. Figure 3 shows an example for the site at Greenbelt Maryland, USA.
Differences which deviate from the mean by more than three times the standard deviation are classified as outliers. For this station pair, 39 comparisons are thus rejected, which leaves at the end 3,624 comparisons with a mean difference in ZTD of 0.7 mm and a scatter (standard deviation of differences between GPS and DORIS ZTDs) of 7.3 mm. The mean formal error for the DORIS estimates is also given (4.0 mm), but the result suggest that formal errors are slightly underestimated. Based on other studies, the DORIS ZTD errors are believed to be somewhat larger than GPS ZTD errors (Snadjrova et al. 2006; Bock et al. 2007; 2010; Teke~et~al. 2011).
5 Comparing Zenith Tropospheric Delays
Figure 4 shows the average ZTD observed at the DORIS stations and the differences (mean and standard deviation) and the correlation coefficient with GPS ZTD estimates. The mean ZTD (Fig. 4a) reflects the combined effect of altitude of the site (through the hydrostatic component which is proportional to surface air pressure) and total column water vapor (TCWV). Hence, sites close to Equator have usually high ZTD because of high TCWV (e.g. krub and libc) and sites in mountainous areas have weak ZTD because of low surface pressure (e.g. arfb, monb, reub).
Figure 4b shows that at most sites the mean difference (DORIS − GPS) is very close to zero. Only some sites have large positive biases (easb, arfb, cadb, with bias > 10 mm) or negative bias (cidb, with bias < −5 mm). These sites are also among those where the correlation between DORIS and GPS estimates is the smallest (Fig. 4d). The standard deviations of the differences (Fig. 4c) show larger values in the tropical region. In this region, the DORIS errors are expected to be larger because there are fewer observations from the near-polar orbiting satellites and water vapor fluctuations are larger.
We can see in Fig. 4d that the linear correlation coefficient between GPS and DORIS is very high (always above 0.9 and 0.97 on average). Consistent with the results of Bock et al. (2010), the best agreement between DORIS and GPS is found in the higher northern latitudes. The worst results are seen the southern hemisphere at stations easb, sanb, cidb, adfb. Inspection of ZTD time series reveals that at stations cidb and adfb the outlier rejection was not efficient. Large errors remain in the DORIS solution which are not yet completely understood. Discarding these two stations, one can see that the stations where the correlation coefficient is smaller than 0.95 are all located in the southern hemisphere. The results shown in Fig. 4 differ slightly from those published by Bock et al. (2010).
The reason may be differences in DORIS and GPS data processing. Table 1 reports results for different DORIS processing procedures and different years. The first row for year 2007 is from Bock et al. (2010). The impact of estimating tropospheric gradients can be assessed by comparing the second row to the first row. The median is not affected, but both the mean bias and scatter in the bias over the ensemble of 40 stations decrease significantly. This indicates that estimating gradients improves the DORIS ZTD estimates, on average. The standard deviation of difference however increases slightly. This is expected because more parameters are estimated with the same amount of observations. The biases in 2010 (3rd and 4th row) are even smaller, demonstrating a nearly zero bias in ZTD between DORIS and GPS. Switching from a cutoff angle of 10–5° does slightly further reduce the bias.
6 Comparing Horizontal Tropospheric Gradients
In our DORIS and GPS data processing, horizontal gradients were also estimated to account for a possible asymmetry of the local troposphere. The estimated values are very small (rarely above 2 or 3 mm). Figure 5 shows an example for an important co-located site in Greenbelt.
In Fig. 5, the estimated values for GPS and DORIS are very small, showing larger scatter for both GPS and DORIS around July, probably related to the more humid and variable weather in the Washington DC area at this time of year. Correlation between GPS and DORIS horizontal gradients were already discussed in Willis et al. (2012). For the station in Greenbelt, the correlation between GPS and DORIS horizontal gradients is 0.40 in East and 0.46 in North. When taking in consideration all co-located sites, correlation between GPS and DORIS gradients is 0.267 in East and 0.370 in North.
7 Conclusions
In conclusion, ZTDs derived from a reprocessed DORIS data analysis in 2010 demonstrate only a minor improvement from previous solutions. Comparisons with IGS/ZTDs products show a high degree of correlation (0.97 on average) and demonstrate on average a 3 mm-level agreement (with 8.6 mm for RMS) between DORIS and GPS ZTDs results derived from the same software package (GIPSY-OASIS II) but using independent data and different data analysis strategies. Best comparisons are obtained when tropospheric gradients are estimated for DORIS and when a lower elevation cutoff (5°) is used. A complete reprocessing of the DORIS data since 1993.0 is now necessary in order to optimize the use these results for future climatic studies.
References
Altamimi Z, Boucher C, Willis P (2005) Terrestrial reference frame requirements within IGGOS, in IGGOS science rationale. J Geodyn 40(4–5):363–374
Altamimi Z, Collilieux X, Legrand J, Garayt B, Boucher C (2007) ITRF2005, a new release of the international terrestrial reference frame based on time series of station positions and earth orientation parameters. J Geophys Res 112(B9) (art. B09401)
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008, an improved solution of the international terrestrial reference frame. J Geod 85(8):457–473
Argus DF, Gordon RG, Heflin MB, Ma C, Eanes R, Willis P, Peltier WR, Owen S (2010) The angular velocities of the plates and the velocity of Earth’s center from space geodesy. Geophys J Int 180(3):916–960
Auriol A, Tourain C (2010) DORIS system, the new age. Adv Space Res 46(12):1484–1496
Bar-Sever YE, Kroger PM, Borjesson JA (1998) Estimating horizontal gradients of tropospheric path delay with a single GPS receiver. J Geophys Res 103(B3):5019–5035
Bock O, Bouin MN, Walpersdorff A, Lafore JP, Janicot S, Guichard F, Agusti-Panadera A (2007) Comparison of ground-based GPS precipitable water vapour to independent observations and NWP model reanalyses over Africa. Quat J R Meteror Soc 133(629):2011–2027
Bock O, Willis P, Laccara M, Bosser P (2010) An inter-comparison of zenith tropospheric delays derived from DORIS and GPS data. Adv Space Res 46(12):1648–1660
Boehm J, Niell A, Tregoning P, Schuh H (2006) Global Mapping Function (GMF), a new empirical mapping function based on numerical weather model data. Geophys Res Lett 33(7)
Boehm J, Heinkelmann R, Schuh H (2007) A global model of pressure and temperature for geodetic applications. J Geod 81(10):679–683
Byun SH, Bar-Sever YE (2009) A new type of troposphere zenith path delay product of the International GNSS service. J Geod 83(3–4):367–373
Cerri L, Berthias JP, Bertiger WI, Haines BJ, Lemoine FG, Mercier F, Ries JC, Willis P, Zelensky NP, Ziebart M (2010) Precision orbit determination standards for the Jason series of altimeter missions. Mar Geod 33(S1):379–418
Dee DP, Uppala SM, Simmons AJ, Berrisford P, Poli P et al (2011) The ERA-interim reanalysis, configuration and performance of the data assimilation system. Quat J R Meteor Soc 137(656):553–597
Eberhart-Phillips D, Hauessler PJ, Freymueller JT, Frankel AD, Rubin CM et al (2003) The 2002 Denali fault earthquake, Alaka, a large magnitude, slip-partitioned event. Science 300(5622):1113–1118
Fagard H (2006) Twenty years of evolution for the DORIS permanent network, From its initial deployment to its renovation. J Geod 80(8–11):429–456
Flouzat M, Bettinelli P, Willis P, Avouac JP, Heriter T, Gautam U (2009) Investigating tropospheric effects and seasonal position variations in GPS and DORIS time series from the Nepal Himalaya. Geophys J Int 178(3):1246–1259
Gobinddass ML, Willis P, de Viron O, Sibthorpe AJ, Zelensky NP, Ries JC, Ferland R, Bar-Sever YE, Diament M (2009a) Systematic biases in DORIS-derived geocenter time series related to solar radiation pressure mis-modelling. J Geod 83(9):849–858
Gobinddass ML, Willis P, de Viron O, Sibthorpe A, Zelensky NP, Ries JC, Ferland R, Bar-sever YE, Diament M, Lemoine FG (2009b) Improving DORIS geocenter time series using an empirical rescaling of solar radiation pressure. Adv Space Res 44(11):1279–1287
Gobinddass ML, Willis P, Diament M, Menvielle M (2010) Refining DORIS atmospheric drag estimation in preparation of ITRF2008. Adv Space Res 46(12):1566–1577
Lemoine JM, Capdeville H (2006) A corrective model for Jason-1 DORIS Doppler data in relation of the South Atlantic anomaly. J Geod 80(8–11):507–523
Lemoine FG, Zelensky NP, Chinn D, Pavlis D, Beckley B, Lutchke SB, Willis P, Ziebart M, Sibthorpe A, Boy JP, Luceri V (2010) Towards development of a consistent orbit determination, TOPEX/Poseidon, Jason-1 and Jason-2. Adv Space Res 46(12):1513–1540
Nocquet JM, Willis P, Garcia S (2006) Plate kinematics in Africa and surrounding plates from a combination of DORIS and GPS solutions. J Geod 80(8–11):591–607
Noll CE (2010) The crustal dynamics data information system, a resource to support scientific analysis using space geodesy. Adv Space Res 45(12):1421–1440
Perfettini H, Avouac JP, Ruegg JC (2005) Geodetic displacements and aftershocks following the 2001 Mw = 8.4 Peru earthquake, implications for the mechanics of the earthquake cycle along subduction zones. J Geophys Res 110(B9)
Saastamoinen J (1973) Contribution to the theory of atmospheric réfraction. Bull Geod 107:1334
Schmid R, Steigenberger P, Gendt G, Ge M, Rothacher M (2007) Generation of a consistent absolute phase center correction model for GPS receiver and satellite antennas. J Geophys Res 81:781–798
Snadjrova K, Boehm J, Willis P, Haas R, Schuh H (2006) Multi-technique comparison of tropospheric zenith delays derived from CONT02 campaign. J Geod 79(10–11):613–623
Stepanek P, Dousa J, Filler V, Hugentobler U (2010) DORIS data analysis at GOP using single-satellite and multi-satellite solutions. Adv Space Res 46(12):1578–1592
Tavernier G, Soudarin L, Larson K, Noll C, Ries J, Willis P (2002) Current status of the DORIS pilot experiment and the future international DORIS service. Adv Space Res 30(2):151–156
Teke K, Böhm J, Nilsson T, Schuh H, Steigenberger P, Dach R, Heinkelmann R, Willis P, Haase R, Garcia-Espada S, Hobiger T, Ichikawa R, Shimizu S (2011) Multi-technique comparison of troposphere zenith delays and gradients during CONT08. J Geod 85(7):395–413
Tregoning P, Herring TA (2006) Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith total delays. Geophys Res Lett 33(23), art. L23303
Vigny C, Socquet A, Peyrat S, Ruegg JC, Metois M, Madariaga R, Morvan S, Lancieri M, Lacassin R, Campos J, Carrizo D, Bejar-Pizarro M, Barrientos S, Armijo R, Aranda C, Valderas-Bermejo MC, Otrega I, Bondoux F, Baize S, Lyon-Caen H, Pavez A, Vilotte JP, Bevis M, Brooks B, Smalley R, Parra H, Baez JC, Nlanco M, Cimbaro S, Kendrick E (2011) The 2010 Mw 8.8 Maule megathrust earthquake of central Chile, monitored by GPS. Science 332(6036):1417–1421
Williams SDP, Willis P (2006) DORIS network, error analysis of weekly station coordinates. J Geod 80(8–11):525–539
Willis P (2007) Analysis of a possible future degradation in the DORIS geodetic results related to changes in the satellite constellation. Adv Space Res 39(10):1582–1588
Willis P, Haines B, Berthias JP, Sengenes P, Le Mouel JL (2004) Behavior of the DORIS/Jason oscillator over the South Atlantic anomaly. C R Geosci 336(9):839–846
Willis P, Deleflie F, Barlier F, Bar-Sever YE, Romans L (2005a) Effects of thermosphere total density perturbations on LEO orbits during severe geomagnetic conditions (Oct - Nov 2003). Adv Space Res 36(3):522–533
Willis P, Desai SD, Bertiger WI, Haines BJ, Auriol A (2005b) DORIS satellite antenna maps derived from long-term residuals time series. Adv Space Res 36(3):486–497
Willis P, Jayles C, Bar-Sever YE (2006) DORIS, from altimeric missions orbit determination to geodesy. C R Geosci 338(14–15):968–979
Willis P, Soudarin L, Jayles C, Rolland L (2007a) DORIS applications for solid earth and atmospheric sciences. C R Geosci 339(16):949–959
Willis P, Haines BJ, Kuang D (2007b) DORIS satellite phase center determination and consequences on the derived scale of the terrestrial reference frame. Adv Space Res 39(10):1589–1596
Willis P, Ries JC, Zelensky NP, Soudarin L, Fagard H, Pavlis EC, Lemoine FG (2009) DPOD2005, realization of a DORIS terrestrial reference frame for precise orbit determination. Adv Space Res 44(5):535–544
Willis P, Fagard H, Ferrage P, Lemoine FG, Noll CE, Noomen R, Otten M, Ries JC, Soudarin L, Tavernier G, Valette JJ (2010a) The international DORIS service, toward maturity. Adv Space Res 45(12):1408–1420
Willis P, Boucher C, Fagard H, Garayt B, Gobinddass ML (2010b) Contributions of the French Institut Géographique National (IGN) to the international DORIS service. Adv Space Res 45(12):1470–1480
Willis P, Bar-Sever YE, Bock O (2012) Estimating horizontal tropospheric gradients in DORIS data processing, preliminary results. IAG Symp 136:1011–1017
Zumberge JF, Heflin MB, Jefferson DC, Watkins MB, Web MH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgements
Part of this work was supported by the Centre National d’Etudes Spatiales (CNES). Part of this work was carried out at the Jet Propulsion Laboratory, California Institute of Navigation, under a contract with the National Aeronautics and Space Administration. It is based on observations with DORIS embarked on SPOTs, TOPEX/Poseidon, Envisat, Jason-2 and Cryosat-2 satellites. This paper is IPGP contribution number 3286.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Willis, P., Bock, O., Bar-Sever, Y.E. (2014). DORIS Tropospheric Estimation at IGN: Current Strategies, GPS Intercomparisons and Perspectives. In: Rizos, C., Willis, P. (eds) Earth on the Edge: Science for a Sustainable Planet. International Association of Geodesy Symposia, vol 139. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-37222-3_2
Download citation
DOI: https://doi.org/10.1007/978-3-642-37222-3_2
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-37221-6
Online ISBN: 978-3-642-37222-3
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)