
Abstract
This paper considers the maximum power point tracking (MPPT) problem of the photovoltaic array, an improved method (the application of genetic algorithms to optimize the fuzzy controller) is presented based on fuzzy control. The simulation results are shown in different external environment conditions. It can be concluded that the proposed method can quickly track the maximum power point of photovoltaic arrays, and also reduce the maximum power point oscillation energy loss. Therefore, the energy conversion efficiency of photovoltaic power generation system is improved.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
At present, as the growing energy crisis and environmental issues, it has become a global concern for effective and rational use of existing resources. The photovoltaic power generation is a broad prospect of green energy, and has become the hotspot of domestic and international academic and industrial research. The bottleneck problem of the photovoltaic cell research is the low efficiency of photoelectric conversion. In order to solve this problem, an effective measurement of maximum power point tracking Maximum Power Point Tracking (MPPT) is employed to improve the efficiency of the PV system [1–3]. This approach allows to maximize the power output of photovoltaic cells in load and environmental conditions.
Traditional MPPT control methods include the constant voltage method, perturbation and observation method and the incremental conductance method and so on [4]. But in practical application, there are various shortcomings for different methods. Recently, control based on smart technology becomes a common method [5]. In this paper, the fuzzy control technique is applied to the MPPT control, and genetic algorithms are used to optimize the fuzzy controller, which can further improve the performance of the MPPT controller. Simulation results show that this method can effectively improve the system’s ability to respond with changes of the external environment and reduce the oscillations around the maximum power point.
2 Characteristics of Photovoltaic Cells
The relations between current and voltage of photovoltaic cell output is given by
where, I is photovoltaic cell output current, I s is short circuit current, I 0 is the reverse saturation current, q is charge constant, A is p-n junction coefficient of semiconductor devices in Photovoltaic cells, K is Boltzman constant, T is absolute temperature, and V is the output voltage of Photovoltaic cell.
Photovoltaic cell is neither a constant voltage source, nor the constant current source, but a non-linear DC power supply. Its output current is approximately constant in the most range of the work. However, when it’s up to the open circuit voltage, the current sharply declines. From Fig. 95.1a and b, maximum output power of the PV array varies with the sunlight intensity and temperature. Therefore, it is necessary to control maximum power point tracking of photovoltaic arrays so that the array can obtain maximum power output under any conditions [6].

PV curves with the external environment variation. a Curve of solar radiation intensity. b Curve of the temperature changes
3 Fuzzy Controller Design
The Fuzzy inference system [7] is shown in Fig. 95.2. Mamdani fuzzy inference method is used and the defuzzification is utilized as the method in the area center of gravity.

Fuzzy inference system
3.1 Input and Output of Fuzzy Controller
The two inputs of the fuzzy controller are the error E and error change CE. The error E and error change CE have been defined in formula (95.2) and (95.3), and the output is duty cycle change of switching device in the MPPT circuit.
where, \( P_{pv} \) is PV output power and \( v_{pv} \) is PV output voltage.
3.2 Membership Function
Membership function includes normal type, triangular, rectangular, Gaussian and other forms [8]. In this paper the triangle membership function is used. Traditional triangular membership functions are shown in Fig. 95.3a.

The membership functions of fuzzy input and output variables. a Traditional membership function. b Optimized membership function
In order to improve the performance of the fuzzy controller, the genetic algorithm is used to find the optimal membership function. Specific steps are as follows:
-
(1)
Establishment of the initial population
Two inputs E(k), CE(k) and an output dD are used in fuzzy controller design. Each variable are described by five membership functions. The group includes a certain number of individuals, and each individual is composed of three chromosomes: E(k), CE(k) and dD, which is described as follows:
-
(a)
the gene of chromosome E(k): A 1, A 2, A 3, A 4 are changing in the interval (0, 1).
-
(b)
the gene of chromosome CE(k): B 1, B 2, B 3, B 4 are changing in the interval (0, 1).
-
(c)
the gene of chromosome dD: C 1, C 2, C 3, C 4 are changing in the interval (0, 1).
The respective relationships between each gene and \( x_{i} \), \( y_{i} \), \( z_{i} \) are denoted by
The schematic of the individual is shown in Fig. 95.4. In this paper, the groups containing 100 individuals are used to obtain the optimal solution.

Description of an individual
-
(2)
Applying the following fitness function to select:
where, P is the ideal power and \( P_{\hbox{max} } \) is the maximum output power of the module under standard conditions. The ways to produce the next generations are as follows:
-
(1)
The crossover operator: the continuous variables of a crossover probability are equal to 1 and the distribution of index n = 5.
-
(2)
Variation: the use of continuous variables, the probability \( P_{m} = 1/N_{g} = 1/12,\) and distribution of index n = 5.
-
(3)
Implementation of the restructuring: the optimal strategy. Parent population and offspring population are put together, selecting the best N individuals into new populations.
-
(4)
Termination conditions: Computation is terminated when the largest genetic generation is up to 60, then the fitness function achieves the minimum.
-
(3)
Optimization of membership function
The above process enables the system gradually achieve the optimal solution. In the last generation, the best individual of the population represents the optimal solution. The individual is given based on the parameter requirements. The optimal solution is obtained given the shape of the membership function, as shown in Fig. 95.3b.
3.3 Fuzzy Decision
The fuzzy rules, which are the core of the fuzzy controller, can be established according to whether the power output of photovoltaic cells is able to quickly reach a given scope of the request or not. The fuzzy rule IF A AND B then C is used [9], and the final fuzzy rules are shown in Table 95.1.
4 Simulation and Results Analysis
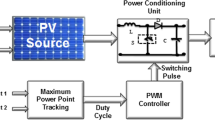
Figure 95.5 shows the simulation system block diagram. The system consists of photovoltaic modules, DC/DC converter, and the fuzzy logic controller. Simulations are employed by Matlab/Simulink [10], and under the standard state that the temperature T = 25 °C, light intensity R = 1000 W/m2, the photovoltaic cell output power waveform is shown in Fig. 95.6.

Basic block diagram of the system

Output power waveform in the standard state
Further test of the system performance are shown in the following steps
-
(1)
R = 1000 W/m2 is constant and temperature slowly roses from 25 to 30 °C at the time of 0.05–0.15 s.
-
(2)
T = 25 °C is constant and light intensity slowly rise from 1000 to 1200 W/m2 at the time of 0.05–0.15 s.
With the external environment variation, the waveform of the output power of the photovoltaic cells is shown in Fig. 95.7.

Output power waveform with external environment change. a Temperature curve. b Temperature curve. c Light intensity curve. d The battery output power waveform with light intensity change
The simulation results show that the optimized fuzzy MPPT controller possesses excellent performance. As can be seen in Fig. 95.6, the output power of photovoltaic cells can be stabilized at maximum power point in the 5 ms. Meanwhile, the steady-state tracking accuracy is up to 99.9 % and steady state accuracy is close to 100 % under standard conditions. It can be seen from Fig. 95.7 that the photovoltaic cells can quickly and accurately track the alternation as the external environment varies. The law is compliance with the output characteristics of photovoltaic cells and the new maximum power point can be obtained with very high tracking accuracy.
5 Conclusions
In order to improve the conversion efficiency of PV systems under different temperatures and light intensities, the fuzzy control is applied in the MPPT of photovoltaic cells. Firstly, the MPPT controller based on fuzzy logic control technology is designed. In order to improve the performance of the controller, the genetic algorithm is used to obtain the optimal membership function. Then, we test the optimized fuzzy MPPT controller under different conditions of temperatures and light intensities. Optimized controller shows the expected tracking performance, and has a high control accuracy and stability.
References
Salas V, Olias E, Barrado A, Lazaro A (2006) Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems. Sol Energy Mater Sol Cells 90:1555–1578
Kim TY, Ahn HG, SK Park et al (2001) A novel maximum power point tracking control for photovoltaic power system under rapidly changing solar radiation. In: Proceedings of IEEE conference on international symposium on industrial electronics, Pusan, pp 1011–1014
Esram T, Chapman PL (2007) Comparison of photovoltaic array maximum power point tracking methods. IEEE Trans Energy Convers 22(2):439–449
Mutoh N, Ohno M, Inoue Takayoshi (2006) A method for MPPT control while searching for parameters corresponding to weather conditions for PV generation systems. IEEE Trans Industr Electron 4:1055–1056
Tariq A, Jamil Asghar MS (2005) Development of an analog maximum power point tracker for photovoltaic panel. IEEE Power Electron Drives Syst (1):251–255
Shmilovitz D (2005) Photovoltaic maximum power point tracking employing load parameters. In: IEEE international symposium on industrial electronics, Dubrovnik, Piscataway, IEEE, pp 1037–1039
Ben Salah C, Chaaben M, Ben Ammar M (2008) Multi-criteria fuzzy algorithm for energy management of a domestic photovoltaic panel. Renewable Energy 33:993–1001
Zhang C, He X (2005) Maximum power point tracking by using asymmetric fuzzy control combined with PID for photovoltaic energy generation system. Trans China Electrotech Soc 20(10):72–76
Hua C, Lin J (2004) A modified tracking algorithm for maximum power tracking of solar array. Energy Convers Manage 45:911–925
Mao M, Yu S, Su J (2005) Versatile matlab simulation model for photovoltaic array with MPPT function. Acta Simulata Systematica Sinica 17(5):1248–1251
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Li, W., Sun, Y., Li, X., Sha, X., Li, Z., Du, Y. (2013). Improved MPPT Method Applied to PV System. In: Lu, W., Cai, G., Liu, W., Xing, W. (eds) Proceedings of the 2012 International Conference on Information Technology and Software Engineering. Lecture Notes in Electrical Engineering, vol 211. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-34522-7_95
Download citation
DOI: https://doi.org/10.1007/978-3-642-34522-7_95
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-34521-0
Online ISBN: 978-3-642-34522-7
eBook Packages: EngineeringEngineering (R0)