
Abstract
We apply an evolving surface finite element method (ESFEM) to a mathematical model for diffusion induced grain boundary motion. The model involves the coupling of a diffusion equation on a moving surface to an equation for the motion of the surface. We formulate a finite element approximation of the model which involves triangulated surfaces whose vertices move in time. We present numerical simulations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
- Travel Wave Solution
- Free Boundary Problem
- Boundary Motion
- Finite Element Approximation
- Phase Field Model
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
We consider the problem of determining a hypersurface \(\Gamma (t) \subset {\mathbb{R}}^{3}\) that evolves with the velocity law
where c is a scalar function that solves the diffusion equation
Here V > 0 and \(\kappa \) respectively denote the normal velocity and the mean curvature of \(\Gamma (t)\), \({\partial }^{\circ }c\ = \frac{\partial c} {\partial t} + V \boldsymbol \nu \cdot \nabla c\) denotes the material derivative of c along flow lines orthogonal to \(\Gamma (t)\), D > 0 is a constant diffusivity parameter and \(\varDelta _{\Gamma }c = \nabla _{\Gamma } \cdot \nabla _{\Gamma }c\) is the Laplace Beltrami operator (or surface Laplacian), with \(\nabla _{\Gamma }c = \nabla c -\nabla c \cdot \boldsymbol \nu \boldsymbol \nu \) denoting the tangential gradient and \(\boldsymbol \nu \) the unit normal to \(\Gamma (t)\). Lastly \(\alpha \) and \(\beta \) are positive physical constants. This model can be used to describe the physical phenomenon of diffusion induced grain boundary motion, which is the motion of grain boundaries in thin metallic films due to the absorption of solute from an external vapour, [4, 13]. Here the surface \(\Gamma (t)\) represents the grain boundary and c(x, t) is a scalar function that denotes the concentration of solute on \(\Gamma (t)\).
There are three main techniques for solving geometric evolution equations of the form (1a); the parametric approach, the level set method and the phase field approach, see [6]. Related to these three techniques are recently introduced models for solving advection-diffusion partial differential equations on evolving surfaces of the form (1b); the evolving surface finite element method proposed in [8], an Eulerian surface finite element method, [9], and a diffuse interface model [10, 11, 15]. Here we consider the parametric approach coupled with the evolving surface finite element method. In particular we use techniques introduced in [2] to present a parametric finite element approximation of the hypersurface \(\Gamma \in {\mathbb{R}}^{3}\) moving with the forced geometric motion law (1a). This approximation gives rise to triangulated surfaces \(\Gamma _{h}^{n}\) on which (1b) needs to be approximated. To this end we use the evolving surface finite element method derived in [8] whereby a finite element space is defined that is the space of continuous piecewise linear functions on the triangulated surface.
The free boundary problem (1a) and (1b) arises from formal asymptotics on the phase field model for diffusion induced grain boundary motion presented in [4] and existence and uniqueness of classical solutions to this free boundary problem are presented in [14].
The structure of the article is as follows. In the next section we introduce a weak formulation of problem (1a) and (1b) then in Sect. 3 we present a finite element approximation of the model. We conclude with Sect. 4 in which we present some numerical simulations.
2 The Model
In this section we describe the geometrical configuration that we consider and we present a weak formulation of the model.
2.1 Geometrical Configuration
The geometrical configuration we study takes the form of a domain \(\Omega := (-1,1) \times (0,L) \times (-1,1)\), containing a single hypersurface \(\Gamma (t)\) that spans the height (x 3 direction) and width (x 1 direction) of the domain. We assume that \(\Gamma (t)\) never comes in contact with the planes x 2 = 0 or x 2 = L. We supplement (1a) and (1b) with the following boundary data
where c + and c − are positive constants, and we impose the natural boundary condition
where \(\boldsymbol \mu \) is tangential to \(\partial \Gamma (t)\) and normal to \(\partial \Omega \). Furthermore we set
Physically the conditions (2a)–(2c) imply that solute is only absorbed into the grain boundary from the top and bottom of the film and that initially there is no solute in the film. To supplement (1a) we set \(\Gamma (0) = \Gamma _{0}\) and we impose that the surface remains orthogonally attached to the boundaries \(x_{1} = \pm 1\) and \(x_{3} = \pm 1\) of \(\Omega \).
2.2 Weak Formulation of the Model
Here we introduce a weak formulation of the model. First we give a parametric formulation of (1a): for parametrizations \(\mathbf{x} : \Sigma \times [0,T] \rightarrow {\mathbb{R}}^{3}\), with \(\mathbf{x}(\cdot,0) = \mathbf{x}_{0}(\cdot )\), where \(\Sigma \) is a suitable compact reference manifold in \({\mathbb{R}}^{3}\), (1a) can be written in the form
where the second identity in (3) was used for the first time by Dziuk in [7] in designing a finite element method for mean curvature flow. Second we follow the techniques introduced by Dziuk and Elliott in [8] and introduce a weak formulation of (1b). Multiplying (1b) by \(\phi \in W(\Gamma (t))\), where
integrating over \(\Gamma (t)\) and integrating by parts yields
The function c is defined to be a weak solution of (1b) if (4) holds for almost every \(t \in (0,T)\).
We now note a transport formula see [8], which states that if f is a function defined in a neighbourhood of a surface \(\Gamma (t)\) that is evolving with velocity \(\mathbf{v} = V \boldsymbol \nu \), then
Using (5) we can reformulate (4) as
Thus we arrive at the following weak formulation of the model
3 Finite Element Discretization
In this section we introduce some notation and then we present a finite element discretization of the model (6a)–(6f).
3.1 Notation
For a continuous in time discretization of (6a)–(6f) we approximate \(\Gamma (t)\) by a triangulated evolving surface \(\Gamma _{h}(t)\), such that \(\Gamma _{h}(t) = \cup _{j=1}^{J}\overline{\sigma _{j}(t)}\) where \(\{\sigma _{j}(t)\}_{j=1}^{J}\) is a family of mutually disjoint open triangles. We denote the vertices of \(\sigma _{j}(t)\) by \(\{\mathbf{q}_{j_{k}}(t)\}_{k=0}^{2}\) and we define the unit normal ν(t) to \(\Gamma _{h}(t)\) such that
We define \(\Gamma _{h}^{\pm }(t) := \Gamma _{h}(t) \cap \{ x_{3} = \pm 1\}\), and let I be the number and \(\mathcal{I}\) the set of vertex indices, such that \(\mathcal{I} := \mathcal{I}_{B}^{+} \cup \mathcal{I}_{B}^{-}\cup \mathcal{I}_{I}\), where \(\mathcal{I}_{B}^{\pm }\) denotes the set of nodes that lie on \(\Gamma _{h}^{\pm }(t)\). For each t we define the finite element space
with \(\{\chi _{i}\}_{i=1}^{I}\) denoting the standard basis of S h(t). We set
and
Since the surface \(\Gamma (t)\) intersects \(\Omega \) we follow the techniques used in [3, 5] and define
and
Next we follow the authors in [2] and introduce a weighted normal, \(\boldsymbol \omega (t) := \sum \nolimits _{i=1}^{I}\boldsymbol \omega _{i}(t)\chi _{i}\) such that \(\boldsymbol \omega _{i}(t)\) can be interpreted as a weighted normal defined at the node \(\mathbf{q}_{i}(t)\) of the surface \(\Gamma _{h}(t)\) and is defined by
where \(\mathcal{T}_{h}(t) :=\{ \sigma _{j}(t) : \mathbf{q}_{i}(t) \in \overline{\sigma _{j}(t)}\}\), \(\Lambda _{i}(t) := \cup _{\sigma _{j}(t)\in \mathcal{T}_{h}(t)}\overline{\sigma _{j}(t)}\) and \(\vert \sigma _{j}(t)\vert \) is the measure of \(\sigma _{j}(t)\).
For the fully discrete discretization we set \(t_{m} = m\tau \), \(m = 0 \rightarrow M\) and for each t m , \(m\,=\,0 \rightarrow M\), we define \(\Gamma _{h}^{m} := \Gamma _{h}(t_{m})\), \(\sigma _{j}^{m} := \sigma _{j}(t_{m})\) and \({\boldsymbol \omega }^{m} := \boldsymbol \omega (t_{m})\). Following [2] for scalar (and vector) functions \(u,v \in {L}^{2}(\Gamma )\ (\boldsymbol u,\boldsymbol v \in {[{L}^{2}(\Gamma )]}^{3})\) we introduce the L 2 inner product \(\langle \cdot,\cdot \rangle _{m}\) over \(\Gamma _{h}^{m}\): \(\langle u,v\rangle _{m} :\, =\,\int\nolimits _{\Gamma _{h}^{m}}u \cdot v\) and for piecewise continuous functions u, v we introduce the mass lumped inner product \(\langle \cdot,\cdot \rangle _{m}^{h}\):
where \(u({(\mathbf{q}_{j_{k}}^{m})}^{-}) :=\lim\limits _{\sigma _{j}^{m}\ni \mathbf{p}\rightarrow q_{j_{ k}}^{m}}u(\mathbf{p})\).
3.2 A Fully Discrete Finite Element Approximation of (6b)
We use the approach of Barrett, Garcke and Nürnberg presented in [2], to give a finite element approximation of (6b).
Given a parametrization \({\mathbf{X}}^{m-1} \in \underline{Z}_{b}^{h}(\Gamma _{h}^{m-1})\) of \(\Gamma _{h}^{m-1}\) and an approximation \(C_{h}^{m-1} \in S_{b}^{h}(\Gamma _{h}^{m-1})\) to \(c(t_{m-1})\), find \(\{{\mathbf{X}}^{m},{\kappa }^{m}\} \in \underline{Z}_{b}^{h}(\Gamma _{h}^{m-1}) \times {S}^{h}(\Gamma _{h}^{m-1})\) such that
3.3 Semi-discrete Finite Element Approximation of (6d)
In order to approximate the diffusion equation (6d) we use the evolving surface finite element method introduced by Dziuk and Elliott in [8]. We begin with the following continuous in time approximation of (6d): Find \(C_{h}(\cdot,t) \in S_{b}^{h}(\Gamma _{h}(t))\) such that
Here \(V _{h}(\cdot,t)\) denotes the normal velocity of \(\Gamma _{h}\) and is given by \(V _{h}(\cdot,t) = \sum \limits _{i=1}^{I}V _{i}(t)\chi _{i}(\cdot,t)\) with \(V _{i}(t) = \frac{d\mathbf{X}_{i}} {dt} (t) \cdot \boldsymbol \omega _{i}(t)\).
Recalling that the nodal basis functions of \({S}^{h}(\Gamma _{h}(t))\) are denoted by \(\{\chi _{i}(\cdot,t)\}_{i=1}^{I}\), from [8] we have that if the nodes move with a velocity \(\mathbf{\mathcal{V}} = V \boldsymbol \nu + \mathbf{T}\) then the basis functions satisfy the transport property
Remark 1.
From (9) we note that if the velocity of the nodes is orthogonal to \(\Gamma _{h}\) then we have \({\partial }^{\circ }\chi _{i} = {\partial }^{\bullet }\chi _{i} = 0\), for \(i = 1 \rightarrow I\) and (8) reduces to
3.4 Fully-Discrete Finite Element Approximation of (6d)
For a fully discrete approximation of (6d) we use a semi implicit time discretization; setting \(C_{h}^{m}\) to represent \(C_{h}(\cdot,t_{m})\) and noting (8) and (9) we have:
Given \(\Gamma _{h}^{m-1}\), \(\Gamma _{h}^{m}\) and \(C_{h}^{m-1} \in S_{b}^{h}(\Gamma _{h}^{m-1})\), find \(C_{h}^{m} \in S_{b}^{h}(\Gamma _{h}^{m})\) such that for all \(i \in \mathcal{I}_{I}\)
Here \(V _{h}^{m} = \sum \nolimits _{i=1}^{I}V _{i}^{m}\chi _{i}^{m}\) denotes the fully-discrete normal velocity of \(\Gamma _{h}^{m}\) and
\(\mathbf{T}_{h}^{m} = \sum \limits _{i=1}^{I}\mathbf{T}_{i}^{m}\chi _{i}^{m}\) denotes the fully-discrete tangential velocity of \(\Gamma _{h}^{m}\), with \(V _{i}^{m} := \frac{1} {\tau }(\mathbf{X}_{i}^{m} -\mathbf{X}_{ i}^{m-1}) \cdot \boldsymbol \omega _{ i}^{m}\) and \(\mathbf{T}_{i}^{m} := \frac{1} {\tau }\left ([\mathbf{X}_{i}^{m} -\mathbf{X}_{ i}^{m-1}] - [\mathbf{X}_{ i}^{m} -\mathbf{X}_{ i}^{m-1}] \cdot \boldsymbol \omega _{ i}^{m}\boldsymbol \omega _{ i}^{m}\right )\). Discretising (6e-f) gives
4 Numerical Results
In this section we display numerical simulations obtained from the scheme (7a), (7b) and (11a), (11b). All the simulations presented were produced using the finite element toolbox ALBERTA, [16] and visualised using the visualisation application PARAVIEW, [1].
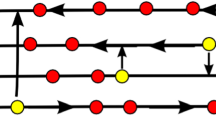
We show two sets of results. In both sets we set \(\Omega = (-1,1) \times (-0.1,4) \times (-1,1)\), and we set \(\Gamma (0)\) to be the planar surface x 2 = 0 with \({C}^{0}(x) \equiv 0\). Furthermore we set \(D = 1,\ \alpha = 5,\ \beta =\)5,000. In the first set of results, Fig. 1, we set \(c_{+} = c_{-} = 1\), while in the second set, Fig. 2, we set \(c_{+} = 1\) and \(c_{-} = 0.5\).

Evolution of a planar surface with \(c_{+} = 1,\ c_{-} = 1,\ D = 1,\ \alpha = 5,\ \beta =\)5,000

Evolution of a planar surface with \(c_{+} = 1,\ c_{-} = 0.5,\ D = 1,\ \alpha = 5,\ \beta =\)5,000
In Fig. 1 the four subplots display the approximate solution \(C_{h}(t_{m})\) on \(\Gamma _{h}(t_{m})\) at times t m = 0. 2, 0. 5, 0. 8, 1. 1. Since the interface is close to planar during the early stages of motion the concentration term in (1a) dominates the motion and as the concentration of solute is higher at the top and bottom of the interface these parts of \(\Gamma _{h}\) move faster than the middle section. Thus the mean curvature, \(\kappa \), of \(\Gamma \) becomes larger in the middle of the domain resulting in this part of \(\Gamma _{h}\) now moving faster than the parts at the top and bottom. The consequence of this motion is that after some time the concentration distribution and the shape of \(\Gamma _{h}\) do not change (see the final two subplots). In particular a travelling wave solution, of the kind studied in [12], has been reached.
In Fig. 2 we diplay the approximate solution \(C_{h}(t_{m})\) on \(\Gamma _{h}(t_{m})\) at times \(t_{m} = 0.2,0.5,0.8,1.0\). In these simulations the concentration of solute that diffuses in from the top is set to be twice that which diffuses from the bottom and as a result the top of the interface always moves faster than the bottom. Again the problem reaches a travelling wave solution.
References
Henderson, A., (2007), ParaView Guide, A Parallel Visualization Application, Kitware Inc.
Barrett, J.W., Garcke, H. & Nürnberg, R., (2008), On the parametric finite element approximation of evolving hypersurfaces in ℝ 3, J. Comput. Phys., 227, 4281–4307.
Barrett, J.W., Garcke, H. & Nürnberg, R., (2007), On the variational approximation of combined second and fourth order geometric evolution equations, SIAM J. Scientific Comp., 29, 1064–8275.
Cahn, J. W., Fife, P. & Penrose, O., (1997), A phase-field model for diffusion-induced grain-boundary motion, Acta Mater., 45, 4397–4413.
Deckelnick, K. & Elliott, C. M., (1998), Finite element error bounds for a curve shrinking with prescribed normal contact to a fixed boundary, IMA J. Num. Anal., 18, 635–654.
Deckelnick, K., Dziuk, G. & Elliott, C. M., (2005), Computation of geometric partial differential equations and mean curvature flow, Acta Numerica, 14, 1–94.
Dziuk, G., (1991), An algorithm for evolutionary surfaces Numer. Math., 58, 603–611.
Dziuk, G. & Elliott, C.M., (2007), Finite Elements on Evolving Surfaces, IMA J. Num. Anal., 27, 262–292.
Dziuk, G. & Elliott, C.M., (2010), An Eulerian approach to transport and diffusion on evolving implicit surfaces, Computing and Visualization in Science, 13, 17–28.
Elliott, C.M., Stinner, B., (2009), Analysis of a diffuse interface approach to an advection diffusion equation on a moving surface, Math. Mod. Meth. Appl. Sci., 19, 787–802.
Elliott, C.M., Stinner, B., Styles V. & Welford, R., (2011), Numerical computation of advection and diffusion on evolving diffuse interfaces, IMA J. Num. Anal., 31, 786-812.
Fife, P., Cahn, J. W. & Elliott, C. M., (2001), A free boundary model for diffusion-induced grain-boundary motion, Interfaces and Free Boundaries, 3, 291-336.
Handwerker, C., (1988), Diffusion–induced grain boundary migration in thin films, in Diffusion Phenomena in Thin Films and Microelectronic Materials, Ed. D. Gupta and P.S. Ho, Noyes Pubs. Park Ridge, N.J., 245–322.
Mayer, U.F. & Simonett, G., (1999), Classical solutions for diffusion induced grain boundary boundary motion, J. Math. Anal. Appl., 234, 660–674.
Ratz, A. & Voigt, A., (2006),PDE’s on surfaces - A diffuse interface approach, Comm. Math. Sciences, 4, 575–590.
Schmidt, A. & Siebert, K. G., (2005), Design of adaptive finite element software: The finite element toolbox ALBERTA, vol. 42 of Lecture notes in computational science and engineering, Springer.
Acknowledgements
This work was supported by the EPSRC grant EP/D078334/1.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Styles, V. (2013). An Evolving Surface Finite Element Method for the Numerical Solution of Diffusion Induced Grain Boundary Motion. In: Cangiani, A., Davidchack, R., Georgoulis, E., Gorban, A., Levesley, J., Tretyakov, M. (eds) Numerical Mathematics and Advanced Applications 2011. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33134-3_50
Download citation
DOI: https://doi.org/10.1007/978-3-642-33134-3_50
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33133-6
Online ISBN: 978-3-642-33134-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)