
Abstract
In this paper we present the analysis of the discontinuous Galerkin (DG) finite element method applied to a nonstationary nonlinear convection-diffusion problem. Using the technique of Zhang and Shu (SIAM J Numer Anal 42(2):641–666, 2004), originally for explicit schemes, we prove apriori error estimates uniform with respect to the diffusion coefficient and valid even in the purely convective case. We extend the cited analysis to the method of lines using continuous mathematical induction and a nonlinear Gronwall-type lemma. For an implicit scheme, we prove that there does not exist a Gronwall-type lemma capable of proving the desired estimates using standard arguments. Next, we use a suitable continuation of the implicit solution and use continuous mathematical induction to prove error estimates under a CFL-like condition.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Continuous Problem
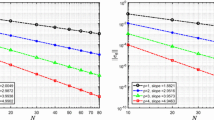
\(\varepsilon \) - spi1
Let \(\Omega \subset {\mathbb{R}}^{d},d = 1,2,3\) be a bounded open (polyhedral) domain. We treat the following nonlinear convection-diffusion problem: find \(u : \Omega \times (0,T) \rightarrow \mathbb{R}\) such that
along with the initial condition \(u(x,0) = {u}^{0}(x)\) in Ω. The diffusion coefficient \(\varepsilon \geq 0\) is a given constant, \(g,u_{D},g_{N}\), and u 0 are given functions.
We assume that the convective fluxes \(\mathbf{f} = (f_{1},\cdots \,,f_{d}) \in {(C_{b}^{2}(\mathbb{R}))}^{d} = {({C}^{2}(\mathbb{R}) \cap {W}^{2,\infty }(\mathbb{R}))}^{d}\), hence f and \({\mathbf{f}}^{{\prime}} = (f_{1}^{{\prime}},\cdots \,,f_{d}^{{\prime}})\) are globally Lipschitz continuous. For improved estimates via Remark 1, we shall assume \(\mathbf{f} \in {(C_{b}^{3}(\mathbb{R}))}^{d}\). In [4], the error analysis is extended, assuming only local properties, i.e. \(\mathbf{f} \in {({C}^{2}(\mathbb{R}))}^{d}\) and \(\mathbf{f} \in {({C}^{3}(\mathbb{R}))}^{d}\).
In our analysis, we need to assume that Γ N is an outflow boundary for either u or u h , i.e. e.g. for u, we assume \(\Gamma _{N}^{(t)} \subseteq \{ x \in \partial \Omega ;{\mathbf{f}}^{{\prime}}(u(x,t)).\mathbf{n} \geq 0\}\) and \(\Gamma _{D}^{(t)} := \partial \Omega \setminus \Gamma _{N}\).
2 Discretization
Let \(\mathcal{T}_{h}\) be (generally nonconforming) triangulation of \(\overline{\Omega }\). For \(K \in \mathcal{T}_{h}\) we set \(h = \mbox{ max}_{K\in \mathcal{T}_{h}}\mbox{ diam}(K)\). By \(\mathcal{F}_{h}\) we denote the system of all faces of all elements \(K \in \mathcal{T}_{h}\). By \(\mathcal{F}_{h}^{I},\mathcal{F}_{h}^{D},\mathcal{F}_{h}^{N},\mathcal{F}_{h}^{B}\) we denote the sets on interior, Dirichlet, Neumann and boundary edges, respectively. For each \(\Gamma \in \mathcal{F}_{h}\) we define a fixed unit normal n Γ , which has the same orientation as the outer normal to \(\partial \Omega \) if \(\Gamma \in \mathcal{F}_{h}^{B}\).
Over a triangulation \(\mathcal{T}_{h}\) we define the broken Sobolev spaces \({H}^{k}(\Omega ,\mathcal{T}_{h}) =\{ v;\,v\vert _{K} \in {H}^{k}(K),\,\forall K \in \mathcal{T}_{h}\}\). For \(\Gamma \in \mathcal{F}_{h}^{I}\) we have two neighbours \(K_{\Gamma }^{(L)},\,K_{\Gamma }^{(R)} \in \mathcal{T}_{h}\), where n Γ is the outer normal to \(K_{\Gamma }^{(L)}\). For \(v \in {H}^{1}(\Omega ,\mathcal{T}_{h})\) we define on \(\Gamma \in \mathcal{F}_{h}^{I}\): \(v\vert _{\Gamma }^{(L)} = \text{ the trace of }v\vert _{K_{\Gamma }^{(L)}}\text{ on }\Gamma ,\;v\vert _{\Gamma }^{(R)} = \text{ the trace of }v\vert _{K_{\Gamma }^{(R)}}\text{ on }\Gamma ,\;\langle v\rangle _{\Gamma } = \frac{1} {2}\big{(}v\vert _{\Gamma }^{(L)}+v\vert _{ \Gamma }^{(R)}\big{)}\)and \([v]_{\Gamma } = v\vert _{\Gamma }^{(L)} - v\vert _{\Gamma }^{(R)}.\) On \(\Gamma \in \mathcal{F}_{h}^{B}\) we set \(v_{\Gamma } = v\vert _{\Gamma }^{(L)} = \text{ the trace of }v\vert _{K_{\Gamma }^{(L)}}\text{ on }\Gamma \), while \(v\vert _{\Gamma }^{(R)} = u_{D}\) on Γ D , \(v\vert _{\Gamma }^{(R)} = v\vert _{\Gamma }^{(L)}\) on Γ N .
Let p ≥ 1 be an integer. The approximate solution will be sought in the space of discontinuous piecewise polynomial functions \(S_{h} =\{ v;\,v\vert _{K} \in {P}^{p}(K),\forall K \in \mathcal{T}_{h}\},\) where P p(K) are polynomials on K of degree ≤ p. By \((\cdot ,\cdot )\) we denote the L 2(Ω)-scalar product and by \(\|\cdot \|\) the L 2(Ω)-norm. By \(\|\cdot \|_{\infty }\), we denote the \({L}^{\infty }(\Omega )\)-norm.
We introduce the following forms defined for \(v,\varphi \in {H}^{2}(\Omega ,\mathcal{T}_{h})\). Diffusion form:
Interior and boundary penalty jump terms:
Right-hand side form:
The parameter σ in the diffusion and right-hand side forms is defined by \(\sigma \vert _{\Gamma } = C_{W}\vert \Gamma {\vert }^{-1}\), where C W > 0 is a constant, which is chosen large enough to ensure coercivity of the diffusion form – cf. Lemma 2. Depending on the value of Θ in the diffusion form, we get the symmetric (Θ = 1), incomplete (Θ = 0) and nonsymmetric interior penalty \((\Theta = -1)\) variants of the diffusion a right-hand side forms.
Finally we define the convective form
The form b h approximates convective terms with the aid of a numerical flux H(v, w, n). We assume that H has the following standard properties: H is Lipschitz-continuous, consistent, conservative and H is an E-flux, i.e.
The E-flux condition was introduced as a generalization of monotone fluxes by Osher in [5]. Many numerical fluxes used in practice are E-fluxes, e.g. Lax-Friedrichs, Godunov, Engquist-Osher and the Roe flux with entropy fix, cf. [5].
Definition 1.
We say that \(u_{h} \in {C}^{1}([0,T];S_{h})\) is a DG solution of (1) and (2), if \(u_{h}(0) = u_{h}^{0} \approx {u}^{0}\) and for all \(\varphi _{h} \in S_{h},\) and t ∈ (0, T)
3 Some Necessary Results
We assume that the weak solution u is sufficiently regular, namely \(u_{t} := \tfrac{\partial u} {\partial t} \in {L}^{2}\big{(}0,T;{H}^{p+1}(\Omega )\big{)}\), \(u \in {L}^{\infty }(0,T;{W}^{1,\infty }(\Omega )),\) where p ≥ 1 is the degree of approximation. These conditions imply \(u \in C\big{(}[0,T];{H}^{p+1}(\Omega )\big{)}\).
As for the mesh assumptions, we consider a system \(\{\mathcal{T}_{h}\}_{h\in (0,h_{0})}\), h 0 > 0, of triangulations, which are shape regular and satisfy the inverse assumption, cf. [2].
Now, for \(v \in {L}^{2}(\Omega )\) we denote by Π h v the \({L}^{2}(\Omega )\)-projection of v on S h :
Let \(\eta _{h}(t) = u(t) - \Pi _{h}u(t) \in {H}^{p+1}(\Omega ,\mathcal{T}_{h})\) and \(\xi _{h}(t) = \Pi _{h}u(t) - u_{h}(t) \in S_{h}\) for t ∈ (0, T). Then we can write the error e h as \(e_{h}(t) := u(t) - u_{h}(t) = \eta _{h}(t) + \xi _{h}(t)\). Standard approximation results give us estimates for \(\eta _{h}(t)\) in terms of power of h, e.g. \(\vert \vert \eta \vert \vert _{{L}^{2}(\Omega )} \leq C{h}^{p+1}\vert u\vert _{{H}^{p+1}}\), cf. [2].
Lemma 1.
There exists a constant C ≥ 0 independent of h,t, such that
Proof.
The proof follows the arguments of [7], where similar estimates are derived for periodic boundary conditions or compactly supported solutions. The proof for mixed Dirichlet-Neumann boundary conditions is contained in [4]. Here, we only note that the estimate is based on performing second order Taylor expansions of and using the E-flux properties for H. □
Remark 1.
We can improve Lemma (1), if we suppose \(\mathbf{f} \in {(C_{b}^{3}(\mathbb{R}))}^{d}\) and \(\Gamma _{N} = \varnothing \). Then we obtain a factor of \({h}^{-1}\|e_{h}\|_{\infty }^{2}\) instead of \({h}^{-2}\|e_{h}\|_{\infty }^{2}\) in the estimate of Lemma (1). This improved estimate will be useful in proving the resulting estimates for lower order polynomials and with a less restrictive CFL condition, cf. Remark 3.
Lemma 2 (Ellipticity and boundedness of A h , cf. [3]).
Let the constant C W be large enough. Then the form A h is elliptic and bounded , i.e.
where \(\Vert w\Vert _{DG}^{2} = \tfrac{1} {2}\big{(}\sum\limits_{K\in \mathcal{T}_{h}}\vert w\vert _{{H}^{k}(K)}^{2} + J_{h}(w,w)\big{)}\) and \(A_{h}(\cdot ,\cdot ) = a_{h}(\cdot ,\cdot ) + J_{h}(\cdot ,\cdot )\) .
4 Error Analysis for the Method of Lines
We proceed in a standard way. Due to Galerkin orthogonality, we subtract the equations for u and u h and set \(\varphi _{h} := \xi _{h}(t) \in S_{h}\). Since \(\big{(}\tfrac{\partial \xi _{h}} {\partial t} ,\,\xi _{h}\big{)} = \tfrac{1} {2}\, \tfrac{\mathrm{d}} {\mathrm{d}t}\,\Vert \xi {_{h}\|}^{2},\) we get
For the last right-hand side term, we use the Cauchy and Young’s inequalities and standard estimates for η. For the convective and diffusion terms we use Lemmas 1 and 2. Integration from 0 to t ∈ [0, T] yields
For simplicity we have assumed ξ h (0) = 0, i.e. \(u_{h}^{0} = \Pi _{h}{u}^{0}\). Otherwise, we must assume e.g. \(\|\xi _{h}(0)\| = O({h}^{p+1/2})\) and include this term in (12). We notice that if we knew apriori that \(\|e_{h}\|_{\infty } = O(h)\) then the unpleasant term \({h}^{-2}\|e_{h}\|_{\infty }^{2}\) in (12) would be O(1). Thus we could simply apply the standard Gronwall inequality to obtain the desired error estimates.
Lemma 3.
Let t ∈ [0,T] and p ≥ d∕2. If \(\|e_{h}({\vartheta})\| \leq {h}^{1+d/2}\) for all \({\vartheta} \in [0,t]\) , then there exists a constant C T independent of h,t and \(\varepsilon \) such that
Proof.
The assumptions imply, using the inverse inequality and estimates of η, that
where the constant C is independent of \(h,{\vartheta},t\). Using this estimate in (12) gives us
Applying Gronwall’s inequality gives us the desired estimate for ξ h , which along with similar estimates for η gives us (13). □
Now it remains to get rid of the apriori assumption \(\|e_{h}\|_{\infty } = O(h)\). In [7] this is done for an explicit scheme using mathematical induction. Starting from \(\|e_{h}^{0}\| = O({h}^{p+1/2})\), the following induction step is proved:
For the method of lines we have no discrete structure with respect to time and hence cannot use mathematical induction straightforwardly. However, we can divide [0, T] into a finite number of sufficiently small intervals \([t_{n},t_{n+1}]\) on which “e h does not change too much” and use induction with respect to n. This is essentially a continuous mathematical induction argument, a concept introduced in [1].
Remark 2.
Due to the regularity assumptions, \(u,u_{h} \in C([0,T];{L}^{2}(\Omega ))\). Since [0, T] is a compact set, \(e_{h}(\cdot )\) is a uniformly continuous function from [0, T] to L 2(Ω), i.e.
Theorem 1 (Main theorem).
Let \(p > 1 + d/2\) . Then there exists h 1 > 0 such that for all h ∈ (0,h 1 ] we have the estimate
Proof.
We have \(p > 1 + d/2\), thus for all sufficiently small h, we have \(C_{T}({h}^{p+1/2} + \sqrt{\varepsilon }{h}^{p}) \leq \tfrac{1} {2}{h}^{1+d/2}\). We fix an arbitrary h. By Remark 2, there exists δ > 0, such that if \(s,\bar{s} \in [0,T],\vert s -\bar{ s}\vert \leq \varDelta \), then \(\|e_{h}(s) - e_{h}(\bar{s})\| \leq \tfrac{1} {2}{h}^{1+d/2}\). We define \(t_{i} = i\varDelta ,\,i = 0,1,\ldots \) and set \(N :=\max \{ i = 0,1,\ldots ;t_{i} < T\}\), \(t_{N+1} := T\). This defines a partition \(0 = t_{0} < t_{1} < \cdots < t_{N+1} = T\) of [0, T] into N + 1 intervals of length (at most) δ.
We shall now prove by induction that for all \(n = 1,\ldots ,N + 1\)
The desired error estimate is thus obtained by taking \(n := N + 1\) in (19).
-
(i)
n = 1: Since \(\|e_{h}(0)\| \leq \tfrac{1} {2}{h}^{1+d/2}\). By uniform continuity, we have for all s ∈ [0, t 1]
$$\|e_{h}(s)\| \leq \| e_{h}(0)\| +\| e_{h}(s) - e_{h}(0)\| \leq \tfrac{1} {2}{h}^{1+d/2} + \tfrac{1} {2}{h}^{1+d/2} = {h}^{1+d/2}.$$Therefore, by Lemma 3 we obtain estimate (19) on [0, t 1], i.e. for n = 1.
-
(ii)
Induction step: We assume that (19) holds for general n < N + 1. Therefore \(\|e_{h}(t_{n})\| \leq C_{T}({h}^{p+1/2} + \sqrt{\varepsilon }{h}^{p}) \leq \tfrac{1} {2}{h}^{1+d/2}\). By uniform continuity, for all \(s \in [t_{n},t_{n+1}]\)
This and the induction assumption imply that \(\|e_{h}(s)\| \leq {h}^{1+d/2}\) for \(s \in [0,t_{n}] \cup [t_{n},t_{n+1}] = [0,t_{n+1}]\). By Lemma 3, we obtain estimate (19) on [0, t n + 1]. □
Remark 3.
If we assume \(\mathbf{f} \in {(C_{b}^{3}(\mathbb{R}))}^{d}\) then by Remark 1 we get the improved assumption \(p > (1 + d)/2\) in Theorem 1. If \(\varepsilon = 0\) we need to assume only p > d ∕ 2.
Remark 4.
For the method of lines we can use a nonlinear Gronwall-type lemma to prove Theorem 1 directly, cf. [4]. As stated in Remark 6, this is not possible for an implicit scheme, since an analogous discrete Gronwall lemma cannot exist.
5 Error Estimates for a Fully Implicit Scheme
In this section, we shall introduce and analyze the DG scheme with a standard implicit Euler time discretization. Here we cannot use the approach of [7] for the explicit scheme, since we were unable to prove the first implication in the induction step (16). On the other hand, in Lemma 6 we prove that for the implicit Euler scheme we cannot use a discrete Gronwall-type lemma as mentioned in Remark 4.
We consider a partition \(0 = t_{0} < t_{1} < \cdots < t_{N+1} = T\) of [0, T] and set \(\tau _{n} = t_{n+1} - t_{n}\) for \(n = 0,\cdots \,,N\). The exact solution u(t n ) will be approximated by \(u_{h}^{n} \in S_{h}\).
Definition 2.
We say that \(\{u_{h}^{n}\}_{n=0}^{N} \subset S_{h}\) is an implicit Euler DGFE solution of the convection-diffusion problem (1) and (2), if \(u_{h}^{0} = \Pi _{h}{u}^{0}\) and for all \(\varphi _{h} \in S_{h},n = 0,\cdots \,,N\)
Similarly as in Sect. 3, we define \(\eta _{h}^{n} = u(t_{n}) - \Pi _{h}u(t_{n}) \in {H}^{p+1}(\Omega ,\mathcal{T}_{h})\) and \(\xi _{h}^{n} = \Pi _{h}u(t_{n}) - u_{h}^{n} \in S_{h}\). Then we can write the error \(e_{h}^{n}\) as \(e_{h}^{n} := u(t_{n}) - u_{h}^{n} = \eta _{h}^{n} + \xi _{h}^{n}\).
First, we analyze problem (22), proving that \(u_{h}^{n+1}\) exists uniquely and depends continuously on τ n . To this end we define an abstract formulation of problem (22):
Definition 3.
(Auxiliary problem) Let t ∈ [0, T], τ ∈ [0, T] and \(U_{h} \in S_{h}\). We seek \(u_{\tau } \in S_{h}\) such that
Remark 5.
If we take \(\tau := \tau _{n},U_{h} := u_{h}^{n},t := t_{n+1}\) and define \(u_{h}^{n+1} := u_{\tau }\), the auxiliary problem (23) reduces to equation (22), which defines \(u_{h}^{n+1}\). If we take τ : = 0 the solution of (23) is \(u_{\tau } = u_{h}^{n}\). Between these two cases \(u_{\tau }\) depends continuously on τ:
Lemma 4.
There exist constants \(C_{1},C_{2} > 0\) independent of \(h,\tau ,t,\varepsilon \) , such that the following holds. Let \(t \in [0,T],h \in (0,h_{0}),U_{h} \in S_{h}\) and τ ∈ [0,τ 0 ), where \(\tau _{0} =\max \{ C_{1}\varepsilon ,C_{2}h\}\) . Then the solution u τ of (23) exists, is uniquely determined and \(\|u_{\tau }\|\) depends continuously on \(\tau \in [0,\tau _{0})\) .
Proof.
Problem (23) is a nonlinear equation for u τ on the finite-dimensional space S h . The statements follow from the nonlinear Lax-Milgram theorem, cf. [6]. For details of the proof, see [4]. □
Definition 4 (Continuated discrete solution).
Let \(\tilde{u}_{h} : [0,T] \rightarrow S_{h}\) such that for \(s \in [t_{n},t_{n+1}]\) we set \(\tilde{u}_{h}(s) := u_{\tau }\), the solution of the auxiliary problem (23) with \(\tau := s - t_{n}\), t : = t n + 1 and \(U_{h} := u_{h}^{n}\). Furthermore, we define \(\tilde{e}_{h} := u -\tilde{ u}_{h}\) and \(\tilde{\xi }_{h} := \Pi _{h}u -\tilde{ u}_{h}\).
Under the assumptions of Lemma 4, \(\tilde{u}_{h},\tilde{e}_{h} \in C([0,T];{L}^{2}(\Omega ))\) and \(\tilde{u}_{h}\) is uniquely determined. Also, \(\tilde{u}_{h}(t_{n}) = u_{h}^{n}\) and \(\tilde{e}_{h}(t_{n}) = e_{h}^{n}\) for \(n = 0,\cdots \,,N\). Therefore, estimates of \(\tilde{e}_{h}(\cdot )\) imply estimates of \(e_{h}^{n}\). Since \(\tilde{u}_{h}\) is constructed using problem (23), which is essentially the implicit scheme (22) with special data, we can derive error estimates for \(\tilde{u}_{h}\) in a standard manner. For simplicity we assume a uniform partition of [0, T].
Lemma 5.
Let p > d∕2 and \(s \in (t_{n},t_{n+1}]\) for some \(n \in \{ 0,\cdots \,,N - 1\}\) . If \(\|\tilde{e}_{h}(s)\| \leq {h}^{1+d/2}\) and \(\|\tilde{e}_{h}(t_{k})\| \leq {h}^{1+d/2}\) for all \(k = 0,\cdots \,,n,\) then there exists C T > 0 independent of s,n,h,τ such that
Proof.
We subtract (23) from the equation for the exact solution. Thus \(\tilde{e}_{h}(s)\) satisfies
We set \(\varphi _{h} :=\tilde{ \xi }_{h}(s)\) and use the fact that \(2(a - b,a) =\| {a\|}^{2} -\| {b\|}^{2} +\| a - {b\|}^{2}\). We estimate the convective terms using Lemma 1 and the diffusion terms using Lemma 2. The right-hand side represents the temporal error and is estimated as usual. Thus
The assumptions imply \(\|\tilde{e}_{h}(s)\|_{\infty }\leq Ch\), eliminating the factor h − 2. Thus
Similarly, we may derive estimates at t k + 1:
Combining these estimates and using the discrete Gronwall lemma gives us the desired estimate for \(\tilde{\xi }_{h}\). Standard estimates for η give us the estimate for \(\tilde{e}_{h}\). □
Theorem 2 (Main theorem – implicit version).
Let \(p > 1 + d/2\) . Let \(h_{1},\tau _{1} > 0\) be such that \(C_{T}(h_{1}^{p+1/2} + \sqrt{\varepsilon }h_{1}^{p} + \tau _{1}) = \tfrac{1} {2}h_{1}^{1+d/2}\) and \(\tau _{1} < \tau _{0}\) , where τ 0 is defined in Lemma 4. Then for all \(h \in (0,h_{1}),\tau \in (0,\tau _{1})\) we have the estimate
Proof.
Again, \(\tilde{e}_{h}(\cdot )\) is a uniformly continuous function from [0, T] to \({L}^{2}(\Omega )\). This allows to use continuous mathematical induction to eliminate the apriori assumption \(\|\tilde{e}_{h}(t)\| = O({h}^{1+d/2})\) from Lemma 5. The proof thus follows that of Theorem 1. □
Remark 6.
The reason we introduced the continuation of \(u_{h}^{n}\) is that a more standard, straightforward approach is insufficient. Specifically, we prove in [4] that there does not exist a Gronwall-type lemma which could prove the desired error estimate (28) only from the error equation of the implicit scheme tested by \(\xi _{h}^{n+1}\) and the derived estimates of individual terms contained therein.
6 Conclusion
We have presented an analysis of the DG method for a nonlinear convection-diffusion problem. Building on results from [7], which dealt with an explicit time discretization, we proved apriori \({L}^{\infty }({L}^{2})\) error estimates independent of the diffusion coefficient for the method of lines and a fully implicit scheme. We have derived the key estimates for the case of mixed Dirichlet-Neumann boundary conditions, improving the results of [7]. For the method of lines, the error estimates are derived using a continuous mathematical induction argument or a nonlinear Gronwall lemma. For the implicit time discretization, we show that a similar discrete Gronwall lemma does not exist and prove the error estimates using continuous mathematical induction applied to a suitable continuation of the discrete solution. However, using this technique, we obtain an unnatural CFL-like condition for the implicit scheme. In [4], the presented results are extended to of a locally Lipschitz continuous f.
References
Chao Y. R., A note on “Continuous mathematical induction”, Bull. Amer. Math. Soc., 26 (1), 17–18 (1919).
Ciarlet P.G., The Finite Element Method for Elliptic Problems, North-Holland, Amsterdam (1979).
Dolejší V., Feistauer M., Kučera V. and Sobotíková V., An optimal \({L}^{\infty }({L}^{2})\) -error estimate for the discontinuous Galerkin approximation of a nonlinear non-stationary convection-diffusion problem, IMA J. Numer. Anal., 28, 496–521 (2008).
Kučera V., On diffusion-uniform error estimates for the DG method applied to singularly perturbed problems, The Preprint Series of the School of Mathematics, preprint No. MATH-knm-2011/3 (2011), http://www.karlin.mff.cuni.cz/ms-preprints/prep.php.
Osher S., Riemann solvers, the entropy condition, and difference approximations, SIAM. J. Numer. Anal., 21, 217–235 (1984).
Zeidler E., Nonlinear Functional Analysis and Its Applications II/B: Nonlinear Monotone Operators, Springer (1986).
Zhang Q. and Shu C.-W., Error estimates to smooth solutions of Runge–Kutta discontinuous Galerkin methods for scalar conservation laws, SIAM J. Numer. Anal., 42(2), 641–666 (2004).
Acknowledgements
The work was supported by the project P201/11/P414 of the Czech Science Foundation.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Kučera, V. (2013). On ε-Uniform Error Estimates For Singularly Perturbed Problems in the DG Method. In: Cangiani, A., Davidchack, R., Georgoulis, E., Gorban, A., Levesley, J., Tretyakov, M. (eds) Numerical Mathematics and Advanced Applications 2011. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33134-3_40
Download citation
DOI: https://doi.org/10.1007/978-3-642-33134-3_40
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33133-6
Online ISBN: 978-3-642-33134-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)