
Abstract
The integrated optimization problem of multi-level production planning for large and complex discrete manufacturing system was taken as research object in this paper. Firstly, the decision-making process of multi-level distributed production planning in large and complex system was proposed based on system survey. Secondly, the integrated optimization theoretical model of multilevel production planning was formulated by weighted combinatorial optimization method, considering customer satisfaction (quality and delivery), lean manufacturing (bottleneck utilization and cost) as the optimization objective. Finally, augmented lagrangian relaxation method and Heuristic algorithm were adopted and a rule-based hybrid algorithm was designed in order to efficiently solve nonlinear inequality constraints combinatorial optimization problems. This study provided a theoretical approach to solve the scientific problem of production planning decision for the large and complex discrete manufacturing system.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Augmented lagrangian relaxation method
- Combinatorial optimization
- Hybrid heuristic algorithm
- Large and complex discrete manufacturing systems
- Multi-level production planning
Introduction
Research on the production planning has been more than 50 years. Research methods are more and more mature, but there is still a great gap between the study results and industrial state (Kempf et al. 2011). With the development of science and technology, production planning will do inevitably toward the direction of integrated, dynamic and practical, multiple objectives, high-level optimal and the research trend will be seen from centralized manufacturing to the development of distributed manufacturing (Argoneto et al. 2008). Large discrete manufacturing system is a complex multi-level distributed manufacturing system whose production planning with multi-project and multi-parts, different processes, multilevel features, all levels of planning was influenced and constrained by each other (Cai et al. 2011). Today’s production planning problems should be able to deal with the problem from advanced to low-level collaborative integrated decision-making (Maravelias and Sung 2009). Decision-making of production planning for large discrete manufacturing system is characteristic of multiple objectives, multiple constraints and uncertainty, whose integrated optimization model is well known as a NP-hard problem. At present, existing research achievements are less, such as the literatures (Maravelias and Sung 2009; Luo Chunpeng and Rong Gang 2009; Sugimura et al. 2001; Li et al. 2012; Gang 2009; Kis and Kovacs 2012) made only a preliminary study. However, the issue considered was one-sided in current research as that only attached the importance to production cycle, inventory cost, and so on, which has not formed a complete theoretical system (Kis and Kovacs 2012); The research object involving discrete manufacturing system, system characteristic, environment and uncertain factors were generally not taken into consideration, so it was difficult to get a solution in line with the industrial actual state and the demand of the industrial. Therefore, the research and application still face some challenges (Stadtler 2005).
Integrated optimization problem of multi-level production planning for large and complex discrete manufacturing system was taken as research object in this paper. The process of decision-making of production planning was combed based on actual investigation and analysis of system. Considering customer satisfaction (quality and delivery) and enterprise operational efficiency (output and lean production) comprehensively as the optimization objective, the integrated optimization theoretical model with actual system characteristics of multi-level production planning was formulated, and then a effective solution scheme and algorithm for it was sought. This study provided a theoretical approach to scientifically solve the problem of production planning decision for the large and complex discrete manufacturing system.
Decision-Making Process of Multi-level Distribution Production Planning
Modern large discrete manufacturing system makes geographically dispersed a number of enterprise users, suppliers, and the association of manufacturers and enterprises manufacturing plants and internal several manufacturing workshops integrated classifically using information technology and network technology, the network multi-level distributed manufacturing system is established.
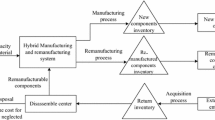
The classification decision system of production planning based on information system is shown in Fig. 14.1.

Classification decision system of production planning based on information system
In this paper, aiming at large discrete manufacturing system, production planning decision will be divided into four levels: the first level is called the enterprise level plan, and the other three levels are respectively called the project manager level plan, the factory level plan and the workshop level plan.
Optimization Decision Model
Sets and Input Parameters
-
I: set of products, indexed by i
-
R: set of product parts, R = {rij,i = 1,…,n; j = 1,…,m}
-
K: set of processing steps, K = {K ijp ,i = 1,…,n;j = 1,…,m; p = 1,…,q}, p is the number of steps
-
T: set of manufacturing times, T = {t ijp , i = 1,…,n;j = 1,…,m; p = 1,…,q}, t ijp is the quota of process p
-
W: set of weights of products and components \( \mathrm{ W}=\{{{\mathrm{ W}}_{{ij\mathrm{ p}}}}\text{,}\mathrm{ i}=\text{1,}\ldots,\mathrm{ n};\mathrm{ j}=\text{1,}\ldots,\mathrm{ m}\text{,}\mathrm{ p}=\text{1,}\ldots,\mathrm{ q}\} \);
-
M: set of stations, M = {M e ,Ne,e = 1,…,E}, M e is set of the amount of type of equipment, assuming only one part can be processed on one machine at the same time
-
α: state index of equipment is used, when in use \( \alpha =1 \), otherwise \( \alpha =0 \)
-
C ij : total cost of production of part j of product i
-
W ijp : the weight of part j of product i at the end of process p
-
w ij,p,p−1 : amount of material transporting of part j of product i between the process p and the process p−1
-
d ij,p,p−1 : distance of material transporting of part j of product i between the process p and the process p−1
-
T’ e,t : in course of task time of equipment of type M e within time t
-
O ij,t : order of part j of product i within t
-
\( {{t^{\prime}}_{ij }} \): delivery of part j of product i
-
t ij : manufacturing completion time of the part j of product i
-
h ijp,e : unit time cost per when part j of product i using equipment of type M e to process p
-
t ijp,e : time of the part j of product i using equipment of type M e to process p
-
\( {Q_{ijc }} \): customer demand for products quality index
-
\( {Q_{ije }} \): comprehensive technical performance index of equipment;
-
\( {\beta_h} \): multi-objective integrated weights
-
\( \delta \): state index whether the type M e is bottleneck machine, when M e is, \( \delta =1 \), otherwise \( \delta =0 \)
Optimizing Objectives
According to the actual production, customer satisfaction (the product quality and delivery for the index) and enterprise operation efficiency and benefit are mainly used as decision-making objectives of production planning for large discrete manufacturing systems. Output capacity (with bottleneck equipment utilization index) and lean production and zero waste are generally used as operation efficiency and benefit of enterprise. In this paper, dimensionless indexes are adopted, each of which is independent of each other. Specific indexes are described as follows:
-
1.
The customer satisfaction : quality index of product. The quality of mechanical products mainly depends on machining and assembly, and the precision of machining mainly depends on the precision index of comprehensive performance of the equipment. The precision index of comprehensive performance of a single equipment is: \( Q=\sqrt{{\frac{{\sum {{{{(\frac{{{T_{pi }}}}{{{T_{si }}}})}}^2}} }}{n}}} \), here, Tpi is the single precision value of element of i of actual measurement of the equipment; Tsi is a single precision value of standard article; n is the number of terms of actual measurement. Quality index of product is represented by reliability assurance index. That’s to maximize the ratio of the comprehensive technical performance index of equipment and the quality index of customer demand of product.
$$ Z(Q)=\max \sum\limits_{{i\in I}} {\sum\limits_{{j\in R}} {\frac{{{Q_{ije }}}}{{{Q_{ijc }}}}} }, {Q_{ije }}=\sum\limits_{{e\in E}} {{Q_{{ij{M_e}}}}} $$(14.1) -
2.
A second customer satisfaction index : product delivery. It is represented by delivery completion rate index, that’s to minimize the ratio of the actual completion time and order delivery, and it is also a basic task of the production system to plan and organize.
$$ Z(T)=\min \sum\limits_{{i\in I}} {\sum\limits_{{j\in R}} {\frac{{t_{ij }}}{{{{{t^{\prime}}}_{ij }}}}} } $$(14.2) -
3.
Utilization index of bottleneck equipment : According to Theory of Constraints, output capacity depends on the utilization of bottleneck resource. Bottleneck can be identified by manual or intelligent system. The index is to maximize the ratio of actual working time and available working time of bottleneck equipment (system time minus the time that is running and that has plans to carry out its mandate).
$$ Z(U)=\max U=\max \sum\limits_{{i\in I}} {\sum\limits_{{j\in R}} {\sum\limits_{{e\in E}} {\frac{{{t_{ijp,t,e }}.\alpha .{o_{ij }}.\delta }}{{{N_e}({T_{e,t }}-{{{T^{\prime}}}_{e,t }})}}} } }, 0\le U\le 1,{T_{e,t }}\ne {{T^{\prime}}_{e,t }} $$(14.3) -
4.
Objectives of lean production : waste at least. If production planning and organization of large discrete manufacturing system improper can often result in the phenomenon of “big car Mara” and high logistics cost, the product tardiness problem and other issues, which can cause a great waste. Lean production, zero defect, zero waste, JIT production are objectives of the modern enterprise in business to pursuit excellence. This paper minimize the ratio of sum of cost of using equipment and cost of transportation and total cost as one optimizing objective.
$$ Z(V)=\mathrm{ m}in\sum\limits_{{i\in I}} {\sum\limits_{{j\in R}} {\frac{{\sum\limits_{{p\in K}} {\sum\limits_{{e\in E}} {{h_{ijp,e }}{t_{ijp,e }}} } +\sum\limits_{{p\in K}} {{w_{ij,p,p-1 }}{d_{ij,p,p-1 }}} }}{{{C_{ij }}}}} } $$(14.4)
Integrated Optimizing Model
Integrated optimization problem of decision-making of production planning is a combinatorial optimization problem with characteristic of computational complexity, which need obtain the optimal solution from set of feasible solution of the problem of combination. This paper, weighting coefficients \( {\beta_h} \) are set according to degrees of importance that the multiple objective functions are to the systems. The optimization model was established as follow by using a weighted combination method:
Formula (14.5) is the integrated optimization objective of decision-making of production planning of factory and job shop scheduling. Constraints (14.6) ensure quality of the product. Constraints (14.7) limit the delivery of each product, here \( \zeta \) is liberalization ratio of random factors. Constraints (14.8) limit capacity of station with given amount time, considering the task which is being executed and that has been planned to implement. Constraints (14.9) limit the process. Constraints (14.10) limit the weight of parts. Constraints (14.11) is the cost control, supposing the waste of the production system no more than \( \theta \).
Solution of Model
In current related literatures, heuristic algorithm (Iskander 1997), genetic algorithm (GA) (Sortrakul et al. 2005), particle swarm optimization ant colony algorithm (Guo et al. 2009), hybrid evolutionary algorithm (Li et al. 2011) and augmented lagrange method (Shah et al. 2011; Nishi et al. 2007) are mainly used methods for solving global optimal solutions of combinatorial optimization problems of production planning. In this paper, general augmented lagrange relaxation method is adopted, which solve the solution by transforming the nonlinear inequality constrained optimization problem into the unconstrained minimum problem. Multiplier vector \( {\lambda^T} \) and parameter \( \sigma \) of penalty function are introduced, and then the general augmented lagrange function L hestenes-powell is constructed as follows:
The Augmented Lagrange Relaxation
Augmented lagrangian relaxation is one of the most widely used methods presented for solving the complicated optimization problem, which decompose the combinatorial optimization problem into sub problems (Shah et al. 2011). The objective function (14.5) and constraint condition functions (14.6, 14.7, and 14.8) are converted to construct the augmented lagrange function as follows:
In order to simplify solving nonlinear problem, variables are set as follows:
Then formula (14.13) is converted to:
Combinatorial optimization objective \( f(x,\lambda, \sigma ) \) is decomposed into high-level production planning (the enterprise or the factory level) optimization \( {f_{pp }}(x,\lambda, \sigma ) \) and low-level job shop scheduling optimization \( {f_{sp }}(x,\lambda, \sigma ) \) as follows:
Among them,
Algorithm Design
On nonlinear constrained optimization problem, these have a better global convergence of the algorithm are heuristic algorithm, multiplier penalty function method and sequential quadratic programming method, and so on.
In view of complexity of the research object, it will not obtain the global optimal solution on the basis of single algorithm, according to the practical operation experience of production system, a hybrid algorithm based on rule was designed in this paper which combined the multiplier penalty function method, heuristic algorithm and computer information system. The algorithm design is shown in Fig. 14.2. The iterative rule and basic step are as follows:
-
Step 1: Select initial point \( {x^{(1) }} \), \( {\lambda^{(1) }} \). \( \varepsilon \ge 0 \) is expected to small enough. Set k = 1.
-
Step 2: Make \( {x^{(k) }} \) as a initial point to solve the unconstrained problem \( {f_{pp }}({x^{(k) }},\lambda, \sigma ) \) and \( {f_{pp }}({x^{(k) }},\lambda, \sigma ) \), then obtain: \( f({x^{(k) }},\lambda, \sigma ) \), \( g\left( {{x^{(k) }}} \right)={{\left[ {\left( {x_{{ij,\,\,1}}^{\mathrm{k}}-1} \right),\left( {x_{{ij,\,\,\,2}}^{\mathrm{k}}-1} \right),\left( {x_{{ij,\,\,3}}^{\mathrm{k}}-1} \right),\left( {x_{{ij,\,\,4}}^{\mathrm{k}}-1} \right)} \right]}^T} \), if \( {{\left\| {g({x^{(k) }})} \right\|}}\le \varepsilon \), then stop and get the optimization solution \( {f^{*}}=f({x^{(k) }},\lambda, \sigma ) \), otherwise, then turn to the next step.
-
Step3: Compute \( {\lambda_l}^{(k+1) }={\lambda_l}^{(k) }-{\sigma_k}{g_l}({x^{(k) }}),l=1,2,\ldots,{L_e},\;{\lambda_l}^{(k+1) }=\max (0,{\lambda_l}^{(k) }-{\sigma_k}{g_l}({x^{(k) }})),l={L_e}+1,\ldots,L \),
Make \( {\sigma_{k+1 }}=\rho {\sigma_k},k=k+1 \), here \( \rho \) is integer, then turn to step 2.

Production planning integration hybrid algorithm
Conclusion
Production planning is the core task of enterprise production management, which directly related to competition factors such as quality of the product, delivery and cost. In this paper, the large and complex discrete manufacturing system was taken as research object, and some actual survey analysis of the system was also carried out, production planning decision process of whose was combed. Considering the customer satisfaction (quality and delivery) and business efficiency (output and lean production) and other optimization objectives, an integrated optimization model with multiple projects in different parts, process, multi-objective, constraint, random uncertainty and other system characteristics was established by using weighted combination optimization method. Finally, augmented lagrangian relaxation method was adopted in order to effectively solve the nonlinear inequality constrained optimization problems, which is the most widely used method to solve the complex large scale optimization problems, augmented lagrange function was constructed. According to the practical operation experience and heuristic algorithm, a rule based hybrid algorithm was designed. This paper provided a theoretical method to solve the problem of integrated optimization of multilevel production planning. Due to limited space, example validations of the effectiveness of the model and algorithm will do further research in the follow-up article.
References
Argoneto P, Perrone G, Renna P (2008) Production planning in production networks: models for medium and short-term planning [M]. Springer, London
Cai Y, Kutanoglu E, Hasenbein J (2011) Production planning and scheduling: interaction and coordination, in planning production and inventories in the extended enterprise [M]. Springer, London
Gang LCR (2009) A strategy for the integration of production planning and scheduling in refineries under uncertainty [J]. Chin J Chem Eng 17(1):113–127
Guo YW, Li WD, Mileham AR, Owen GW (2009) Applications of particle swarm optimisation in integrated process planning and scheduling [J]. Robot Comput Integr Manuf 25(2):280–288
Iskander SPW (1997) A survey of scheduling rules. Oper Res 25(1):45–61
Kempf KG et al (2011) Planning production and inventories in the extended enterprise: a state of the art handbook [M], International series in operations research and management science 151. Springer, New York/Dordrecht/Heidelberg/London
Kis T, Kovacs A (2012) A cutting plane approach for integrated planning and scheduling [J]. Comput Oper Res 39(2):320–327
Li X, Gao L, Li W (2011) Application of game theory based hybrid algorithm for multi-objective integrated process planning and scheduling [J]. Expert Syst Appl 39(1):288–297
Li X, Gao L, Li W (2012) Application of game theory based hybrid algorithm for multi-objective integrated process planning and scheduling [J]. Expert Syst Appl 39(1):288–297
Luo Chunpeng, Rong Gang (2009) A Strategy for Integration of Production and Scheduling in Refineries under Uncertainty [J]. Chinese Journal of Chem Eng 17(1):13–12
Maravelias CT, Sung C (2009) Integration of production planning and scheduling: overview, challenges and opportunities [J]. Comput Chem Eng 33(12):1919–1930
Nishi T, Konishi M, Ago M (2007) A distributed decision making system for integrated optimization of production scheduling and distribution for aluminum production line [J]. Comput Chem Eng 31(10):1205–1221
Shah NK, Ierapetritou MG (2011) Integrated production planning and scheduling optimization of multisite, multiproduct process industry [J]. Comput Chem Eng 37:214–226
Sortrakul N, Nachtmann HL, Cassady CR (2005) Genetic algorithms for integrated preventive maintenance planning and production scheduling for a single machine [J]. Comput Ind 56(2):161–168
Stadtler H (2005) Supply chain management and advanced planning—basics, overview and challenges [J]. Eur J Op Res 163:563–575
Sugimura N, Hino R, Moriwaki T (2001) Integrated process planning and scheduling in Holonic manufacturing systems [C]. In: Proceedings of IEEE international symposium on assembly and task planning, Soft Research Park
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Yang, Xy., Wang, X., Shi, Gh. (2013). Integrated Optimization of Production Planning for Large and Complex Discrete Manufacturing System. In: Dou, R. (eds) Proceedings of 2012 3rd International Asia Conference on Industrial Engineering and Management Innovation (IEMI2012). Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33012-4_14
Download citation
DOI: https://doi.org/10.1007/978-3-642-33012-4_14
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33011-7
Online ISBN: 978-3-642-33012-4
eBook Packages: Business and EconomicsBusiness and Management (R0)