
Abstract
With increasing of offshore wind turbines (OWTs) in recent years, the supporting structure are needed to suite the cases with water depth greater than 100 m. In such cases, the effects of wind, wave and current become much obvious, and jacket support structure are recommended for the OWTs. During the service period, the soil-pile interaction has a significant effect on the dynamic response of the OWT structure. Thus, this paper aims to first investigate the characteristics of soil-pile interaction under the cyclic loadings, and then study the dynamic responses of the jacket support OWTs. Based on the bounding surface elasto-plastic theory, the cyclic t-z curve is proposed, which used to simulate the load-displacement relationships along the pile shaft. Related parameters can be analyzed and calibrated based on the constant normal stiffness cyclic direct shear test of pile-soil interface. The cyclic t-z curves are programmed using the software COMSOL, and used in the FEM model for the dynamic simulation of jacket foundation OWT. Under two-way sinusoidal regular load case, the dynamic responses of jacket foundation OWT are simulated and studied. The results show that the API t-z curve will underestimate natural frequency, which leads to insecure design for jacket foundation OWTs. And the proposed cyclic t-z model can reflect natural frequency degradation under cyclic loading, which can well evaluate the dynamic response than API method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Offshore Wind Turbines (OWT)
- Jacket Foundations
- Cyclic Direct Shear Tests
- Pile-soil Interaction
- Constant Normal Stiffness (CNS)
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The soil-pile interaction has a significant effect on the dynamic response of the OWT structure, including natural frequency degradation, permanent accumulated rotation (Wei et al. 2015; Carswell et al. 2016). The current design methods are based on the elastic theory in the API (2007) and DNV (2013) codes, so, the code methods can’t consider the natural frequency change under cyclic loads. Dong (2012) proposed a p-y model based on the boundary surface elasto-plastic theory, which can simulate the soil-pile interaction under cyclic loading. McCarron (2016) proposed a boundary surface model for soil resistance to cyclic lateral pile displacement with arbitrary direction.
Compared to monopile, the pile resistance of jacket foundation mainly depend on the tension and pression which results that the t-z curve has great effect on the dynamic response of OWTs. This paper aims to first investigate the characteristics of soil-pile interaction (t-z curve) under the cyclic loadings, and then study the dynamic responses of the jacket support OWTs. Related parameters in cyclic t-z model can be calibrated by cyclic direct shear test of pile-soil interface. The intention is to develop a new method to evaluate the dynamic response of jacket OWTs.
2 Boundary Surface Model Theoretical Framework
Traditional p-y, t-z curves aren’t suitable for cyclic loading and two-way loading. Based on the boundary surface theory, this paper developed a t-z model, which has cyclic weakening effect.
2.1 Elasto-Plastic Cyclic t-z Model
Model Building
The t-z model relating the pile axial displacement z at a certain depth and the pile axial resistance t for unit area. The displacement increment dz caused by the resistance increment dt is decomposed into elastic part and plastic part, which are showed in Fig. 1, and this can be described as:
where \( dz^{e} \), \( dz^{p} \) are the elastic, plastic displacement increment respectively.

Constitution of soil-pile interactive spring
The elastic-plastic resistance factor relating the resistance increment dt and the axial displacement increment dz is of the form:
Firstly, define the boundary,
and the boundary length is
In the Eqs. 5–7, pm is the maximum soil-pile interface friction in a certain depth in history. When dp > 0, ρ is the distance between the minimum boundary −pm and the current p; When dp < 0, ρ is the distance between the maximum boundary pm and the current p. That is to say, when
when
Dong (2012) gives the plastic resistance factor Kp expression in p-y model:
where h is curve shape parameter, f(yp) is degradation function:
where n is model parameters, equal to 10 and α is degradation parameter, \( \int {\left| {dy^{p} } \right|} \) is accumulated plastic displacement of spring, yr is the reference displacement.
The study found that for the t-z curve in sand, the displacement required for the soil-pile surface ultimate resistance is far less than that of p-y curve, which meas t-z curve in sand degradates slower than p-y curve. So, the degradation function in the reference (Dong 2012) is not suitable for soil-pile surface mechanics in sand under cyclic loading. In addition, parameters in the p-y model can’t be calibrated using soil element laboratory tests.
This paper adopt the p-y curve theory framework in reference (Dong 2012) to develop a t-z model in which the parameters can be calibrated using soil element laboratory tests. And then, this paper develops a new t-z curve degradation function in sand, which makes results are in good agreement with the experimental results. The new degradation function is showed in Eq. 12:
where a, b are model parameters.
Model Parameters’ Calibration Based on Soil Element Laboratory Tests
In order to fix the parameters in the model at every depth, a certain simplification is needed to deal with the actual problems. The main assumptions are listed as follows:
-
(1)
The same soil at different depth have the same displacement to reach the ultimate resistance.
-
(2)
The same soil at different depth have the same friction angle of soil-pile interface.
-
(3)
The same soil at different depth have the same degradation law in soil-pile surface mechanics.
Based on the three assumptions, model parameters at every depth can be confirmed.
-
(1)
Elastic resistance factor Ke
Elastic resistance factor Ke is the initial tangent modulus for t-z curve, which is a constant in the model. The relationship between shear stress and shear displacement can be obtained by direct shear test of soil-pile interface, which is called τ-z curve. The initial tangent modulus of the τ-z curve is elastic resistance factor Ke.
-
(2)
Capacity pu
pu is the ultimate strength of the soil-pile interface, which can be calibrated by direct shear test of soil-pile interface at a certain normal stress. In addition, pu also can be estimated by Eq. 13:
$$ p_{{^{{_{u} }} }} = \sigma \cdot \tan \varphi \cdot K $$(13)where σ is effective stress at a certain depth, \( \varphi \) is soil-pile surface friction angle, K is coefficient of lateral pressure, equal to 0.8.
-
(3)
Curve shape parameter h
Curve shape parameter h controls the t-z curve’s shape for monotonic loading, which can be calibrated through direct shear test of soil-pile interface.
-
(4)
Degraded parameters a, b
Degraded parameter a, b control the stiffness degradation under cyclic loading. The test results found that the strength of the interface is greatly degraded after first cycle, and in the subsequent cycles, the strength degradation of the interface is smaller, as well as the gap between different cycles decreases gradually. Parameter a controls the strength degradation in the first cycle, b controls the strength degradation in the subsequent cycles. Through cyclic direct shear test of the soil-pile surface, parameters a, b can be obtained by fitting date or try method.
In this way, this part explanation can calibrate t-z model parameters based on soil element laboratory tests.
3 Engineering Application
This part is an example of engineering application to calibrate t-z model parameters based on the cyclic direct shear test of soil-pile surface results obtained from reference (Shang 2016). After parameters calibration, the cyclic t-z curves are programmed using the software COMSOL, and used in the FEM model for the dynamic simulation of jacket foundation OWT.
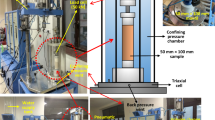
3.1 Introduction About Cyclic Direct Shear Test of Soil-Pile Surface
From reference (Shang 2016), the cyclic direct shear test of soil-pile surface under constant normal stiffness (CNS) condition has 10 mm shear displacement amplitude and 20 cycles, and the shear speed is 5 mm/min, the normal stress is 90 kPa. The sand used in test is China ISO standard sand, which d50 is 0.34 mm, Dr = 90%. The surface of steel plate is treated with polishing, and the roughness of the surface is close to the roughness of the steel pipe pile.
3.2 t-z Model Parameters’ Calibration
-
(1)
Elastic Resistance Factor K e
From the results of soil-pile surface cyclic direct shear test, the relationship between shear stress and shear displacement in the first loading can be obtained. In Fig. 2(a), it is can be seen that the first few points are approximated to a linear, so, the line’s sloop is the elastic resistance factor Ke. In this case, \( K_{e} = 3.862 \times 10^{7} \) Pa/m.
Fig. 2. 
Calibration of elastic resistance factor Ke (a) and curve shape parameter h (b)
-
(2)
Curve Shape Parameter h
Due to h control the shape of the stress-displacement curve, we can adjust the value of h to make the simulated curve fits in well with the first loading curve (before peak point). Figure 2(b) shows the comparison of simulation curve and test curve when h = 2.5.

-
(3)
Friction Angle of Soil-Pile Surface φ
Friction angle of soil-pile surface φ can be obtained using Eq. 14.
$$ \varphi = \arctan \left( {\frac{{\tau_{\hbox{max} } }}{\sigma }} \right){ = }\arctan \frac{35.21}{90}\;{ = }\;21.367^{ \circ } $$(14)where \( \tau_{\hbox{max} } \) is the peak strength in the first loading, σ is normal stress.
-
(4)
Degraded Parameters a, b
Due to the test data isn’t complete, data fitting can’t be carried out to calibrate a, b. In this case, using try method to calibrate a, b. Figure 3 shows the comparison between simulation and test date hysteresis loops when a = 0.05, b = 0.55. It can be seen that the simulation curve coincides with the test curve in general.
Fig. 3. 
Calibration of degradative parameters a, b

3.3 Brief Introduction About the Numerical Model
In this part, using FEM software COMSOL builds a numerical model to study the effect of cyclic degraded t-z curve to dynamic response of jacket foundation OWT. Some detail information about the jacket foundation OWT can be found in Table 1. The soil condition is assumed to the homogeneous sand which is the same with the above tested sand. The jacket foundation OWT numerical model is built by using the beam element, and the number of total elements are 224. To study the effect of cyclic t-z curve, this numerical model is combined with the API p-y, API Q-z and the cyclic t-z.
In this paper, one load case under two-way deterministic condition is investigated. The load direction is along the diagonal of the jacket structure which is the most dangerous case, and the point load magnitude acted on the hub is showed in Eq. 15.
where f is the load frequency, f = 0.1 Hz.
4 Results and Discussion
The numerical simulation founds that the first order natural frequency has degraded from 0.31942 to 0.31743 Hz after 18 cycles. Table 2 shows the initial natural frequencies, natural frequencies’ change after 18 loading cycles and the natural frequencies obtained by using the API t-z curve.
The results show that the cyclic t-z model can consider natural frequency degradation after loading cycles. So, the method is more accurate to reflect the fact. At the same time, it can be seen that the natural frequencies obtained by using the API t-z curve is lower. A main problem in the jacket structure design is the global stiffness over the upper limit, so, using API t-z curve will underestimate natural frequencies which leads to insecure design.
5 Conclusion
This paper developed a cyclic t-z model based on the boundary surface theory, and studied the cyclic t-z model’s effects on the dynamic response of jacket foundation OWTs by using FEM method. The results show that the API t-z curve will underestimate natural frequencies, which leads to insecure design. And the proposed cyclic t-z model can reflect natural frequencies degradation under cyclic loading, which can better evaluate the dynamic response than API method.
References
American Petroleum Institute (API): Recommended practice for planning, designing and constructing fixed offshore platforms-working stress design. API Recommended Practice 2A-WSD (RP2A-WSD), Errata and Supplement 3, August 2007
Carswell, W., Arwade, S.R., Degroot, D.J., et al.: Natural frequency degradation and permanent accumulated rotation for offshore wind turbine monopiles in clay. Renew. Energy 97, 319–330 (2016)
DNV, DNV-OS-J101: Design of Offshore Wind Turbine Structure. Det Norske, Vertas AS (2013)
Mccarron, W.O.: Bounding surface model for soil resistance to cyclic lateral pile displacements with arbitrary direction. Comput. Geotech. 71, 47–55 (2016)
Shang, W.: Study on the Weakening Mechanism of Pile Soil Interface Under Cyclic Loading. Qingdao Technological University, Shandong (2016)
Dong, S.: Elastoplastic p–Y model and incremental finite element method for nonlinear foundation beams. J. Geotech. Eng. 34(8), 1469–1474 (2012)
Wei, S., Park, H.C., Chung, C.W., et al.: Soil–structure interaction on the response of jacket-type offshore wind turbine. Int. J. Precis. Eng. Manuf. Green Technol. 2(2), 139–148 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Zhou, W., Guo, Z., Wang, L., Rui, S. (2019). Dynamic Responses of Jacket Foundation Offshore Wind Turbine Considering the Cyclic Loading Effects. In: Ferrari, A., Laloui, L. (eds) Energy Geotechnics. SEG 2018. Springer Series in Geomechanics and Geoengineering. Springer, Cham. https://doi.org/10.1007/978-3-319-99670-7_56
Download citation
DOI: https://doi.org/10.1007/978-3-319-99670-7_56
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-99669-1
Online ISBN: 978-3-319-99670-7
eBook Packages: EngineeringEngineering (R0)