
Abstract
Road noise pollution is one of the most topical environmental issues for local authorities, under the circumstances of increasingly demanding legislation in this area. In this context, the use of road noise models is of particular importance - on the one hand, in the design of new road infrastructures - in order to assess the acoustic impact and avoid further passive noise protection measures that can be very costly, and, on the other hand, for the existing road networks, to minimize noise measurement campaigns only to the volume required to calibrate the model. After a brief presentation of the most commonly used road noise prediction models, a series of simulations were carried out using the Dutch 2002 software based on the British CoRTN model for different values of traffic characteristics on the road artery in front of Building T of the University of Pitesti. Immediate noise measurement at the level of the building, under the same road traffic conditions as in the simulation, confirms the veracity of the results obtained by means of simulation. Finally, a complex model is proposed for predicting the immission of road noise on the basis of road traffic and noise propagation characteristics, where, in the case of long and narrow road arteries, when traffic simulation is carried out at a macro level, the complex model is operable on the basis of already existing noise emission models.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The noise produced by road traffic is constantly under the attention of local authorities, which must monitor road noise and take action to maintain its parameters within the legal boundaries - beyond which road noise is to be classified as noise pollution. The noise level can be determined by its actual measurement, as shown in the other chapters, or it can be calculated by appropriate mathematical models, depending on the characteristics of road traffic and on the medium of noise propagation from the source to the receiver [2]. These are, in a complete wording, models of noise prediction function of road traffic.
It should be noted that the noise emitted by a stationary vehicle is produced only by the vehicle itself, but in the case of a moving vehicle it is the result of three components: the vehicle running noise, the rolling noise (produced by the interaction between the vehicle and the running track) and the aerodynamic noise (produced by the interaction between the vehicle and the atmospheric air). All these three components are the direct result of road traffic – characteristics of vehicles, traffic structure, velocity, traffic flow, road cover, weather conditions. The noise perceived by the receiver (in the case of noise pollution, the receiver is the human being, because it is the human being who is exposed to pollution) is the immitted noise.
The connection between noise emission and noise immission is expressed on the basis of sound propagation laws. As a result, road noise can be expressed in terms of road traffic, taking into account the propagation medium. Research on the prediction of the noise received (noise immission) function of road traffic has been conducted since the middle of the last century in the context of the more and more sustained ecological campaigns promoted by civil society.
Typically, road noise prediction mathematical models take into account traffic flows - for light and heavy vehicles, the road surface characteristics and the distance from the road to the receiver. Several models have been developed around the world, taking into account the particularities of different countries - in terms of road, car park and climate. The use of traffic noise models (TNM) can have two purposes. On the one hand, to design new road infrastructures in order to assess the acoustic impact and to avoid further passive noise protection measures, which can be very costly, on the other hand, for the existing road networks, to minimize noise measurement campaigns only to the volume required for model calibration. Many countries have decided to regulate the use of these models, determining which ones can be adopted to simulate road noise. The most frequently used models are analysed in what follows, with a focus on their main features and particularities.
2 Evolution of Road Noise Prediction Models
The first attempts to make noise prediction were made in the middle of the last century [6], mainly by evaluating the 50% quintile of the noise level, L50 [dB], defined as the noise level exceeded in 50% of the measurement period. These models consider road traffic flows as continuous fluid flows at a common speed for all vehicles (flow velocity) and take into account the distance to the noise source, but without distinguishing between different types of vehicles.
Subsequently, models are proposed which contain a parameter that allows them to be calibrated based on a sample of experimental data taken. Moreover, the percentage of heavy-duty vehicles in road traffic is also taken into account. For countries with warm weather, there are proposed models that take into account motorcycle flows as well (alongside light vehicle and heavy-duty vehicle flows). Trying to aggregate all these models into a general expression in which any one of them could be found by customization, we arrive at a general expression of the equivalent Leq level calculated according to the statistical traffic noise model, as the next relation [6]:
where Q is the flow of vehicles (the total number of vehicles, irrespective of their type), P is the proportion of heavy-duty vehicles, d is the distance from the observation point to the traffic current axis, and A, B and C are constants by which each model is customized.
As far as the expression in the right parenthesis is concerned, the proportion of heavy duty vehicles P is taken into account because they emit a louder noise than the light ones, the ratio between the noise level attributable to a heavy-duty vehicle and that attributable to a light vehicle being n, called the acoustic equivalent of heavy duty vehicles. As a result, an equivalent traffic flow can be defined in terms of noise, Qeq, according to the relation:
where Q is the flow of vehicles (the total number of vehicles, irrespective of their type), P is the proportion of heavy-duty vehicles, and n is the acoustic equivalent of heavy-duty vehicles.
Coefficients A, B and C can be obtained, for an established investigation area, by linear regression methods, based on different values of the Leq equivalent noise level determined for different traffic flows (Q, P) and distances (d). The acoustic equivalent of heavy-duty vehicles (defined as the number of light vehicles generating acoustic energy equal to that generated by a single heavy-duty vehicle) can be estimated both by regression methods and by measurements made for the noise emission of a single vehicle. The same can be done to estimate the acoustic equivalent of other categories of vehicles, such as motorcycles, buses, etc.
Many countries have conducted studies in order to adopt a road noise assessment methodology or road noise assessment procedures at the national level. Within these national road noise assessment rules, road noise prediction models have also been integrated, which often have a character of originality because they follow the specificity of the country with regard to the determining factors for the emission and propagation of traffic noise.
The most well-known models are those developed in countries with particular concerns in the field, among which we should mention the German model-RLS 90 (1990), the French model-NMPB Routes (2008), the American model-HWA Traffic Noise Level (1995), the British model-CoRTN procedure (1988), the Italian model-CNR (1991), the Japanese Model-ASJ (1993), the Chinese model-GIS Traffic Noise Level (2002), the Thai model-ERTC (1999). These mathematical models of road noise estimation are to be found as distinct (and optional) modules in road traffic modelling software, such as the Visum software [7] from the PTV Vision program package or the Emme software from the INRO Software package.
By analyzing these models of immitted road noise prediction [3], it can be noted that all models are based on a first calculation size (reference size or standard size), which is an acoustic energy descriptor – the Leq equivalent noise level or a quintile of the noise level, L10 or L50. The calculated value of this size is then corrected by various parameters - field absorption, weather conditions, longitudinal slope, average speed, traffic flow type etc.
3 Research Conducted to Predict the Immitted Road Noise
In order to determine by mathematical modelling what noise level results from the traffic identified on the road network near the buildings of the University of Pitesti, the results of the road traffic measurements carried out in this area [3, 5] were used, the main road traffic parameters obtained being the nature of traffic (fluent or pulsating), the structure of traffic (the proportion of heavy-duty vehicles in traffic flows), the hourly traffic volume and the average speed of traffic.
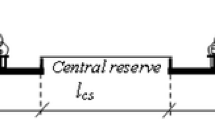
In order to achieve the road noise modelling in the proximity of the road artery in front of Building T of the Faculty of Mechanics and Technology (Gh. Şincai Street) two road noise calculation programs were used - a calculation program of the New Transport Agency Zeeland [11] and a calculation program using the Dutch road noise assessment model [12], according to the latest Dutch standard in the field, developed in 2002, both of which were based on the British CoRTN model (1998). Thus, an application was performed for Building T of the University of Pitesti, where the lecture and laboratory rooms of the Faculty of Mechanics and Technology are situated, for the façade from Gh. Şincai Street (see Fig. 1).

Urbanistic conditions at road noise modelling in the building T area.
These calculation programs are based on the British CoRTN model (Calculation of Road Traffic Noise), which uses traffic data for daytime (7.00 a.m.–10.00 p.m.) and night time (10.00 p.m.–7.00 a.m.) and uses the base noise level for a 10-m distance as reference, L10 [dBA], calculated with the relation:
where q is the hourly traffic flow and the assumed assumptions are: the basic speed is v = 75 km/h, the percentage of heavy-duty vehicles is P = 0%, the slope of the road is G = 0%, the source line is 3.5 m from the edge of the road and the road is singular, with a width of at least 5.0 m.
Before the immitted noise measurements were made for the case of Building T, simulations were made to analyse the results obtained through these road noise prediction models, allowing for the formulation of opinions on their adequacy for the case under consideration. This calculation algorithm allows to calculate the noise level Ldn for day and night in the simplified case of the road sections where the propagation of noise to nearby buildings is not shielded by obstacles, thus it is free. Therefore, in order to highlight the specificity of this model as well as possible, the results obtained for different scenarios are further analysed, maintaining the same geometrical conditions (of the space between the noise source-line and the façade of Building T).
3.1 The Level of Noise Function of the Volume of Traffic (Light Traffic, Only During Daytime)
Conditions: unshielded area - free acoustic field and linear noise source, road at ground level, façade of the building at 25 m from the road axis, at a 5-m height, smooth asphalt, rough terrain - determines reflections, on the opposite side the surface is not reflective due to the slope of the road, great distance from the intersection, which has no influences; only circulated by cars, during daytime exclusively, 07.00 a.m.–10.00 p.m., at an average speed of 50 km/h; traffic volumes increase from 0 to 3000 veh/h). Results: only the Ldn day-night indicator is calculated, since the noise level during the night time is, of course, zero (Ln = 0 dBA), but as the volume of traffic increases, the noise level Ldn calculated for daytime and night time will be the one in the graph (see Fig. 2), observing the continuous but still less and less small increase from 50 dBA to 64 dBA.

Ldn noise level variation during daytime, depending on the volume of light traffic.
3.2 The Level of Noise Function of the Volume of Traffic (Light Traffic, Only During Night Time)
Conditions: circulated only by cars, during night time exclusively, 10.00 p.m–07.00 a.m., at an average speed of 50 km/h; the value range for traffic volume is, naturally, narrower: from 0 to 1000 veh/h. Results: As compared to the previous case - although still one traffic component is taken into account, this time, night time traffic - both indicators - Ldn and Ln – are obtained. As the traffic volume increases, the noise level for night time Ln increases from 49 to 62 dBA, and the Ldn noise level calculated for daytime and night time increases from 54 dBA to 67 dBA. Both levels of noise are growing less and less slowly, maintaining a difference of about 5 dBA, and soften to peak traffic values of 1000 veh/h (see Fig. 3).

Ldn and Ln noise level variation during night time, depending on the volume of light traffic.
3.3 The Level of Noise Function of the Volume of Traffic (Composite Traffic, with the Presence of Heavy-Duty Vehicles, Only During Daytime)
Conditions: circulated by cars and trucks (the percentage of heavy-duty vehicles is 10%), only during the day, 07.00 a.m.–10.00 p.m., at an average speed of 40 km/h; traffic volumes increase from 0 to 3000 veh/h). Results: only the daytime-night time Ldn indicator is calculated. The noise level during night time is, of course, zero (Ln = 0 dB), but as traffic volume increases, the Ldn noise level calculated for daytime and night time will be the one in the graph, with less and less small increases, but with values higher by about 2 dBA than those existing when there are no heavy-duty vehicles in traffic, from 52 dBA to 66 dBA (see Fig. 4).

Ldn noise level variation during daytime, depending on the volume of composite traffic.
3.4 The Ldn Noise Level According to the Height of the Façade Where the Road Noise Is Received
Conditions: the height of the receiver varies from 2 m to 20 m; there is a traffic volume of 1500 standard veh./hour, made up of cars and trucks (the percentage of heavy-duty vehicles is 10%), only during the day from 07.00 a.m. to 10.00 p.m., at an average speed of 40 km/h. Results: only the daytime-night time Ldn indicator is calculated. The noise level during night time is, of course, zero (Ln = 0 dBA). The noise level at the façade varies very little, from the minimum value at the ground floor level, of 61 dBA, to a maximum value of 63 dBA halfway through the façade, and at the top it is again reduced by about 1 dBA (see Fig. 5).

Variation of Ldn noise level during daytime, function of height.
This reduced variation on the height of the building façade is explained by the fairly long distance from the road, of about 25 m, so that the effects of the noise reflection processes, which add to the incident noise, have a small weight.
3.5 The Noise Level According to the Percentage of Heavy-Duty Vehicles, % HV, for Daytime Composite Traffic and Night Time Light Traffic, with Different Average Speeds
Conditions: During daytime there is a traffic volume of 1500 vehicles per hour, made up of cars and trucks, and during night time the average hourly volume of cars is 200 veh/h, 07.00 a.m.–10.00 p.m., at an average speed of 60 km/h. There were introduced the specified data on traffic volumes, average speeds and percentage of heavy-duty vehicles (existing only during the day), as well as the data corresponding to the geometry of the ground (a maximum angle of 127°, since there are no obstacles to noise; the absence of a road intersection in the proximity).
In order to study the noise level variance according to the percentage of heavy-duty vehicles, % HV, simulations were carried out with the Dutch 2002 software for percentages (%) of HV from 0% to 100% (from 0 to 1500 HV), under the conditions of the situation identified by traffic measurements [3], with hourly volumes in peak traffic of 1500 veh/h (the equivalence coefficient of heavy-duty vehicles in standard vehicles is automatically used by the software and corresponds to that of SR 7348/2001 [9] norm and of AND 584-2002 normative [10]: C = 2,5) and at an hourly volume overnight of 200 veh/h.
Table 1 contains the results obtained by simulating with % HV from 0 to 100%, for two values of traffic hourly volume: 1500 veh/h and 3000 veh/h.
It is found that by doubling the traffic there is an increase of the noise level with quite low values, from 1 dBA (for 0% HV) to 2 dBA (for 100% HV) – see Fig. 6.

Variation of daytime noise level Ldn, depending on the percentage of heavy-duty vehicles, % HV.
In contrast, the effect of % HV on road noise is important: the increase in noise level in relation to % HV is quasi-linear, but substantial: from 65 to 72 dBA and, respectively, from 66 to 74 dBA.
But the verosimilitude of these road noise prediction models for Building T requires the measurement of the noise level at the level of the façade, at a 5-m height (these being the conditions for the scenario for which road noise modelling has been performed).
This was performed with the equipment from the Noise and Vibration Laboratory of the Faculty of Mechanics and Technology [4], which is located on the first floor on the façade that is the subject of the analyses presented, with very close values obtained, the differences being reasonable, less than 5%, which makes it possible to assert that the mathematical model used is viable in the case of the road arteries from the municipality of Pitesti.
4 Conclusions: The Proposal of an Integrated Model for Predicting the Road Noise that is Immitted
As a result of the above, it is to be noticed that there is a variety of models for road noise prediction, but some conclusions of interest can be drawn that could serve as the basis for the proposal of an integrating model for road noise prediction - for different areas of the road network (defined by road intersections and road arteries), for the various characteristics of road traffic and for the various characteristics of road circulation.
The fact that the main differentiation of road noise sources can be made according to the characteristics of road traffic [1, 3] is taken into account:
-
when the receiver is at a small distance from the traffic flows, as compared to the distance between vehicles (related to traffic density), the most appropriate approach is to take into account, as noise sources, individual vehicles - punctiform sources;
-
otherwise, it is advisable to consider the entire road flow as the source of noise (defined by its characteristics - debit, velocity, density), therefore as a source-line.
Consideration of individual vehicles as punctiform noise sources actually means calling into question the „vehicle-driver” entity, which requires an approach based on the microsimulation of road traffic. The motion of the vehicle is kinematically defined this way (speed and acceleration), but also the operation regimes of vehicle vehicles (load and speed) are considered, these being transient modes when crossing the road intersection, regimes in the case of which the noise emissions are very high.
As for the movement on road arteries which are not in the vicinity of road intersections, the movement of vehicles can be considered stable (constant speed), so the approach can be based on road flow characteristics, which are also stable [7, 8].
Consequently, given the modelling of traffic and the modelling of road noise in a coordinated fashion, the following immitted road noise prediction model (noise perceived by the receiver) has been proposed based on the characteristics of road traffic and on those of the noise propagation environment (see Fig. 7).

The integrated model proposed for predicting immitted road noise.
This complex model has an integrating character - it is developed in light of the characteristics of the entire “driver - road – vehicle” system, as well as of the noise propagation environment (by means of which the noise emitted is transmitted to the receiver, where immitted noise is perceived - attenuated and with modified features).
Thus, in the case of long and narrow road arteries, when considering traffic flows (traffic macrosimulation), the model is operable on the basis of existing models, according to the analysis presented.
References
Boroiu, A.A., Neagu, E.: Traffic and Road Safety. Applications. University of Pitesti Publishing House, Pitesti (2015)
Boroiu, A.A., Ivan, F., Parlac, S.: Road Noise Modelling. University of Pitesti Publishing House, Pitesti (2016)
Boroiu, A.A.: Studies and research on reducing phonic pollution of automotives by organization of road circulation. Ph.D. Thesis, University of Pitesti (2017)
Boroiu, A.A.: Road Noise Pollution. University of Pitesti Publishing House, Pitesti (2018)
Neagu, E.: Traffic and Road Safety. University of Pitesti Publishing House, Pitesti (2003)
Quartieri, J., Mastorakis, N.E., Iannone, G., Guarnaccia, C., D’Ambrosio, S., Troisi, A. et al.: A review of traffic noise predictive models. In: Recent Advances in Applied and Theoretical Mechanics, pp. 72–80 (2010)
PTV AG Visum 11,5: User Manual. PTV (Planung Transport Verkehr). AG Karlsruhe, epubli GmbH, Berlin (2012)
Transportation Research Board (TRB) of National Academies of Science: Highway Capacity Manual. National Academies of Science, Washington (2010)
SR 7348/2001 Vehicles equivalent for traffic capacity determination
Order of the Ministry of Transport no. 617/2003 for the approval of technical regulation Rules for establishing the calculating traffic for road design in terms of carrying capacity and traffic capacity—indicative AND 584-2002. Road Technical Bulletin, no. 5 (2004)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Boroiu, AA., Neagu, E., Boroiu, A., Parlac, S. (2019). A Comparative Analysis of the Road Noise Immission Models. In: Burnete, N., Varga, B. (eds) Proceedings of the 4th International Congress of Automotive and Transport Engineering (AMMA 2018). AMMA2018 2018. Proceedings in Automotive Engineering. Springer, Cham. https://doi.org/10.1007/978-3-319-94409-8_98
Download citation
DOI: https://doi.org/10.1007/978-3-319-94409-8_98
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-94408-1
Online ISBN: 978-3-319-94409-8
eBook Packages: EngineeringEngineering (R0)