
Abstract
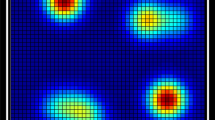
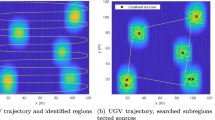
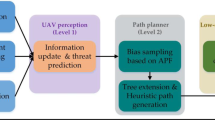
In this paper, we present a framework to solve the problem of rapidly determining regions of interest (ROIs) from an unknown intensity distribution, especially in radiation fields. The vast majority of existing literature on robotics area coverage does not report the identification of ROIs. In a radiation field, ROIs limit the range of exploration to mitigate the monitoring problem. However, considering the limited resources of Unmanned Aerial Vehicle (UAV) as a mobile measurement system, it is challenging to determine ROIs in unknown radiation fields. Given the target area, we attempt to plan a path that facilitates the localization of ROIs with a single UAV, while minimizing the exploration cost. To reduce the complexity of exploration of large scale environment, initially whole areas are adaptively decomposed by the hierarchical method based on Voronoi based subdivision. Once an informative decomposed sub area is selected by maximizing a utility function, the robot heuristically reaches to contaminated areas and then a boundary estimation algorithm is adopted to estimate the environmental boundaries. Finally, the detailed boundaries are approximated by ellipses, called the ROIs of the target area and whole procedures are iterated to sequentially cover the all areas. The simulation results demonstrate that our framework allows a single UAV to efficiently and explore a given target area to maximize the localization rate of ROIs.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others
References
Acar, E.U., Choset, H., Lee, J.Y.: Sensor-based coverage with extended range detectors. IEEE Trans. Robot. 22, 189–198 (2006)
Acar, E.U., Choset, H., Zhang, Y., Schervish, M.: Path planning for robotic demining: robust sensor-based coverage of unstructured environments and probabilistic methods. Int. J. Robot. Res. 22(7–8), 441–466 (2003)
Choset, H.: Coverage for robotics—a survey of recent results. Ann. Math. Artif. Intell. 31(1–4), 113–126 (2001)
Dames, P., Kumar, V.: Autonomous localization of an unknown number of targets without data association using teams of mobile sensors. IEEE Trans. Automat. Sci. Eng. 12, 850–864 (2015)
Galceran, E., Carreras, M.: A survey on coverage path planning for robotics. Robot. Autonom. Syst. 61, 1258–1276 (2013)
Guillen-Climent, M.L., Zarco-Tejada, P.J., Berni, J.A.J., North, P.R.J., Villalobos, F.J.: Mapping radiation interception in row-structured orchards using 3d simulation and high-resolution airborne imagery acquired from a uav. Precision Agri. 13, 473–500 (2012)
Han, J., Xu, Y., Di, L., Chen, Y.: Low-cost multi-uav technologies for contour mapping of nuclear radiation field. J. Intelligen. Robot. Syst. 70, 401–410 (2013)
Lahijanian, M., Maly, M.R., Fried, D., Kavraki, L.E., Kress-gazit, H., Member, S., Vardi, M.Y.: Environ. Partial Satisfact. Guarant. 32(3), 583–599 (2016)
Matveev, A.S., Hoy, M.C., Ovchinnikov, K., Anisimov, A., Savkin, A.V.: Robot navigation for monitoring unsteady environmental boundaries without field gradient estimation. Automatica 62, 227–235 (2015)
Mitchell, D., Chakraborty, N., Sycara, K., Michael, N.: Multi-robot persistent coverage with stochastic task costs. In: IEEE International Conference on Intelligent Robots and Systems, pp. 3401–3406 (2015)
Paull, L., Seto, M., Li, H.: Area coverage planning that accounts for pose uncertainty with an AUV seabed surveying application. Proceedings of IEEE International Conference on Robotics and Automation pp. 6592–6599 (2014)
Paull, L., Thibault, C., Nagaty, A., Seto, M., Li, H.: Sensor-driven area coverage for an autonomous fixed-wing unmanned aerial vehicle. IEEE Trans. Cybernet. 44, 1605–1618 (2014)
Soltero, D.E., Schwager, M., Rus, D.: Decentralized path planning for coverage tasks using gradient descent adaptive control. Int. J. Robot. Res. 33, 401–425 (2014)
Strimel, G.P., Veloso, M.M.: Coverage planning with finite resources. In: IEEE International Conference on Intelligent Robots and Systems, pp. 2950–2956 (2014)
Xu, L.: Graph Planning for Environmental Coverage. Carnegie Mellon University, p. 135 Aug. 2011
Yehoshua, R., Agmon, N., Kaminka, G.A.: Robotic adversarial coverage of known environments. Int. J. Robot. Res. 1–26 (2016)
Acknowledgements
The authors would like to thank Ministry of Education, Culture, Sport, Science and Technology (MEXT) - Japan, for the financial support through MEXT scholarship. In addition, this work was supported by the Industrial Convergence Core Technology Development Program (No. 10063172) funded by MOTIE, Korea.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Pinkam, N., Newaz, A.A.R., Jeong, S., Chong, N.Y. (2019). Rapid Coverage of Regions of Interest for Environmental Monitoring. In: Kim, JH., et al. Robot Intelligence Technology and Applications 5. RiTA 2017. Advances in Intelligent Systems and Computing, vol 751. Springer, Cham. https://doi.org/10.1007/978-3-319-78452-6_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-78452-6_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-78451-9
Online ISBN: 978-3-319-78452-6
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)