
Abstract
Big data is a popular topic that highly attracts the attentions of researchers from all over the world. How to mine valuable information from such huge volumes of data remains an open problem. As the most widely used technology of decision tree, imperfect data stream leads to tree size explosion and detrimental accuracy problems. Over-fitting problem and the imbalanced class distribution reduce the performance of the original decision tree algorithm for stream mining. In this chapter, we propose an Optimized Very Fast Decision Tree (OVFDT) that possesses an optimized node-splitting control mechanism using Hoeffding bound. Accuracy, tree size, and learning time are the significant factors influencing the algorithm’s performance. Naturally, a bigger tree size takes longer computation time. OVFDT is a pioneer model equipped with an incremental optimization mechanism that seeks for a balance between accuracy and tree size for data stream mining. OVFDT operates incrementally by a test-then-train approach. Two new methods of functional tree leaves are proposed to improve the accuracy with which the tree model makes a prediction for a new data stream in the testing phase. The optimized node-splitting mechanism controls the tree model growth in the training phase. The experiment shows that OVFDT obtains an optimal tree structure in numeric and nominal datasets.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Introduction
Big data is a popular topic that highly attracts attentions of researchers from all over the world. How to mine valuable information from such huge volumes of data remains an open problem. Although fast development of hardware is capable of handling much larger volumes of data than ever before, in the author’s opinion, a well-designed algorithm is crucial in solving the problems associated with big data. Data stream mining methodologies propose one-pass algorithms that are capable of discovering knowledge hidden behind massive and continuously moving data. Stream mining provides a good solution for such big data problems, even for potentially infinite volumes of data.
Decision tree learning is one of the most significant classifying techniques in data mining and has been applied to many areas, including business intelligence, health-care and biomedicine, and so forth. The traditional approach to building a decision tree, designed by greedy search, loads a full set of data into memory and partitions the data into a hierarchy of nodes and leaves. The tree cannot be changed when new data are acquired, unless the whole model is rebuilt by reloading the complete set of historical data together with the new data. This approach is unsuitable for unbounded input data such as data streams, in which new data continuously flow in at high speed. A new generation of algorithms has been developed for incremental decision tree, a pioneer of which using a Hoeffding bound (HB) in node-splitting is so called Very Fast Decision Tree (VFDT) (Pedro and Geoff 2000), which can build a decision tree simply by keeping track of the statistics of the attributes of the incoming data. When sufficient statistics have accumulated at each leaf, a node-splitting algorithm determines whether there is enough statistical evidence in favor of a node-split, which expands the tree by replacing the leaf with a new decision node. This decision tree learns by incrementally updating the model while scanning the data stream on the fly. In the past decade, VFDT has been extended to some improved algorithms, inheriting the use of HB (see in section “Background”). This powerful concept is in contrast to a traditional decision tree that requires the reading of a full dataset for tree induction. The obvious advantage is its real-time mining capability, which frees it from the need to store up all of the data to retrain the decision tree because the moving data streams are infinite.
On one hand, the challenge for data stream mining is associated with the imbalanced class distribution. The term “imbalanced data” refers to irregular class distributions in a dataset. For example, a large percentage of training samples may be biased toward class A, leaving few samples that describe class B. Both noise and imbalanced class distribution significantly impair the accuracy of a decision tree classifier through confusion and misclassification prompted by the inappropriate data. The size of the decision tree will also grow excessively large under noisy data. To tackle these problems, some researchers applied data manipulation techniques to handle the imbalanced class distribution problems, including under-sampling, resampling, a recognition-based induction scheme (Nitesh et al. 2004), and a feature subset selection approach (Mladenic and Grobelnik 1999).
On the other hand, despite the difference in their tree-building processes, both traditional and incremental decision trees suffer from a phenomenon called over-fitting when the input data are infected with noise. The noise confuses the tree-building process with conflicting instances. Consequently, the tree size becomes very large and eventually describes noise rather than the underlying relationship. With traditional decision trees, the under-performing branches created by noise and biases are commonly pruned by cross-validating them with separate sets of training and testing data. Pruning algorithms (Elomaa 1999) help keep the size of the decision tree in check; however, the majority are post-pruning techniques that remove relevant tree paths after a whole model has been built from a stationary dataset. Post-pruning of a decision tree in high-speed data stream mining, however, may not be possible (or desirable) because of the nature of incremental access to the constantly incoming data streams. Incremental optimization seeks for solutions that evolve over time in response to environmental changes. In general, there are three performance metrics for incremental problems: ratio, sum, and demand (Hartline 2008). Ratio metric uses a worst-case measurement to determine the distance between the optimal solution and the solution made at each time step. Sum metric is the expected value metric over all time steps. A weight function while summing solution values can easily settle the problem of natural bias for late-stage solution. Demand metric is a decision metric measuring the degree of specific quantitative requirements satisfaction.
VFDT handles streaming data that tree structure keeps on updating when new data arrive. It only requires reading some samples satisfying the statistical bound (referring to the HB) to construct a decision tree. Since it cannot analyze over the whole training dataset in one time, normal optimization methods using full dataset to search for an optima between the accuracy and tree size do not work well here.
Our previous work has provided a solution for sustainable prediction accuracy and regulates the growth of the decision tree to a reasonable extent, even in the presence of noise. Moderated Very Fast Decision Tree (MVFDT) is a novel extension of the VFDT model (Yang and Fong 2011) that includes optimizing the tree-growing process via adaptive tie-breaking threshold instead of a user pre-defined value in VFDT.
In this chapter, for optimizing VFDT, we devise a new version, so called optimized VFDT (OVFDT), which can provide an incremental optimization on prediction accuracy, tree size, and learning time. The contributions of OVFDT are: (1) it contains four types of functional tree leaf that improve the classification accuracy; (2) it inherits the mechanism of MVFDT that uses an adaptive tie-breaking threshold instead of a user pre-defined. To this end, it may suit for the aforementioned real applications; (3) it contains an incremental optimization mechanism in the node-splitting test that obtains an optimal tree structure as a result. By running simulation experiments, the optimized value of adaptive tie is proved to be ideal for constraining the optimal tree growth.
Background
Decision Tree in Data Stream Mining
A decision tree classification problem is defined as follows: N is a set of examples of the form (X, y), where X is a vector of d attributes and y is a discrete class label. k is the index of class label. Suppose a class label with the k th discrete value is yk. Attribute X i is the i th attribute in X, and is assigned a value of x i1 , x i2 … x iJ , where 1 ≤ i ≤ d and J is the number of different values X i . The classification goal is to produce a decision tree model from N examples, which predicts the classes of y in future examples with high accuracy. In data stream mining, the example size is very large or unlimited, N→∞.
VFDT algorithm (Pedro and Geoff 2000) constructs an incremental decision tree by using constant memory and constant time-per-sample. VFDT is a pioneering predictive technique that utilizes the Hoeffding bound. The tree is built by recursively replacing leaves with decision nodes. Sufficient statistics n ijk of attribute X i with a value of x ij are stored in each leaf with a class label assigning to a value y k . A heuristic evaluation function H(⋅) is used to determine split attributes for converting leaves to nodes. Nodes contain the split attributes and leaves contain only the class labels. The leaf represents a class according to the sample label. When a sample enters, it traverses the tree from the root to a leaf, evaluating the relevant attributes at every node. Once the sample reaches a leaf, the sufficient statistics are updated. At this time, the system evaluates each possible condition based on the attribute values; if the statistics are sufficient to support one test over the others, then a leaf is converted to a decision node. The decision node contains the number of possible values for the chosen attribute according to the installed split test. The main elements of VFDT include, first, a tree-initializing process that initially contains only a single leaf and, second, a tree-growing process that contains a splitting check using a heuristic function H(⋅) and Hoeffding bound (HB). VFDT uses information gain as H(⋅).
The formula of HB is shown in (6.1). HB controls over errors in the attribute-splitting distribution selection, where R is the range of classes’ distribution and n is the number of instances that have fallen into a leaf. To evaluate a splitting-value for attribute X i , it chooses the best two values. Suppose x ia is the best value of H(⋅) where x ia = arg max H (x ij ); suppose x ib is the second best value where x ib = arg max H (x ij ), ∀ j ≠ a; suppose ΔH (X i ) is the difference of the best two values for attribute X i , where ΔH (X i ) = ΔH (x ia ) − ΔH (x ib ). Let n be the observed number of instances, HB is used to compute high confidence intervals for the true mean r true of attribute x ij to class y k that r − HB ≤ r true < r + HB where \( r=\left(1/n\right){\sum}_i^n ri \). If after observing n min examples, the inequality r + HB < 1 holds, then r true < 1, meaning that the best attribute x ia observed over a portion of the stream is truly the best attribute over entire stream. Thus, a splitting-value x ij of attribute X i can be found without full attribute values even when we don’t know all values of X i . In other words, it does not train a model from full data and the tree is growing incrementally when more and more data come.
In the past decade, several research papers have proposed different methodologies to improve the accuracy of VFDT. Such incremental decision tree algorithms using HB in node-splitting test are so called Hoeffding Tree (HT). HOT (Pfahringer et al. 2007) proposes an algorithm producing some optional tree branches at the same time, replacing those rules with lower accuracy by optional ones. The classification accuracy has been improved significantly while learning speed is slowed because of the construction of optional tree branches. Some of options are inactive branches consuming computer resource. Functional tree leaf is originally proposed to integrate to incremental decision tree in VFDTc (Gama et al. 2003). Consequently, Naïve Bayes classifier on the tree leaf has improved classification accuracy. The functional tree leaf is able to handle both continuous and discrete values in data streams, but no direct evidence shows it can handle such imperfections like noise and bias in data streams. FlexDT (Hashemi and Yang 2009) proposes a Sigmoid function to handle noisy data and missing values. Sigmoid function is used to decide what true node-splitting value, but sacrificing algorithm speed. For this reason, the lightweight algorithm with fast learning speed is favored for data streams environment. CBDT (Stefan et al. 2009) is a forest of trees algorithm that maintains a number of trees, each of which is rooted on a different attributes and grows independently. It is sensitive to the concept-drift in data streams according to the sliding-window mechanism. VFDR (Gama and Kosina 2011) is a decision rule learner using HB. The same as VFDT, VFDR proposes a rule-expending mechanism that constructs the decision rules (ordered or unordered) from data stream on the fly.
There are two popular platforms for implementing stream-mining decision tree algorithms. Very Fast Machine Learning (VFML) (Hulten and Domingos 2003) is a C-based tool for mining time-changing high-speed data streams. Massive Online Analysis (MOA) (Bifet et al. 2001) is Java-based software for massive data analysis, which is a well-known open source project extended from WEKA data mining. In both platforms, the parameters of VFDT must be pre-configured. For different tree induction tasks, the parameter setup is distinguished.
MOA is an open source project with a user-friendly graphic interface. It also provides several ways to evaluate algorithm’s performance. Hence, some VFDT-extended algorithms have been built-in this platform. For example, the VFDT algorithms embedded in MOA (released on Nov. 2011) are: Ensemble Hoeffding Tree (Oza and Russell 2001) is an online bagging method with some ensemble VFDT classifiers. Adaptive Size Hoeffding Tree (ASHT) (Bifet et al. 2009) is derived from VFDT adding a maximum number of split nodes. ASHT has a maximum number of split nodes. After one node splits, if the number of split nodes is higher than the maximum value, then it deletes some nodes to reduce its size. Besides, it is designed for handling concept-drift data streams AdaHOT (Bifet et al. 2009) is also derived from HOT. Each leaf stored an estimation of current error. The weight of node in voting process was proportional to the square of inverse of error. AdaHOT combines HOT with a voting mechanism on each node. It also extends the advantages using optional trees to replace the tree branches of bad performance. Based on an assumption “there has been no change in the average value inside the window”, ADWIN (Bifet and Gavalda 2007) proposes a solution to detect changes by a variable-length window of recently seen instances. In this chapter, the OVFDT algorithm is developed on the fundamental of MOA platform. All experiments are also run on MOA platform.
Relationship Among Accuracy, Tree Size, and Time
When data contains noisy values, it may confuse the result of heuristic function. The difference of the best two heuristic evaluation for attribute X i , where \( \varDelta \overline{H}\left({X}_i\right)=H\left({x}_{ia}\right)-H\kern0.28em \left({x}_{ib}\right) \), may be negligible. To solve this problem, a fixed tie-breaking τ, which is a user pre-defined threshold for incremental learning decision tree, is proposed as pre-pruning mechanism to control the tree growth speed (Hulten et al. 2001). This threshold constrains the node-splitting condition that \( \varDelta \overline{H}\left({X}_i\right)\le \mathrm{HB}<\tau \). An efficient τ guarantees a minimum tree growth in case of tree size explosion problem. τ must be set before a new learning starts; however, so far there has not been a unique τ suitable for all problems. In other words, there is not a single default value that works well in all tasks so far. The choice of τ hence depends on the data and their nature. It is said that the excessive invocation of tie breaking brings the performance of decision tree learning declining significantly on complex and noise data, even with the additional condition by the parameter τ.
A proposed solution (Geoffrey et al. 2005) to overcome this detrimental effect is an improved tie-breaking mechanism, which not only considers the best (x ia ) and the second best (x ib ) splitting candidates in terms of heuristic function but also uses the worst candidate (x ic ). At the same time, an extra parameter is imported, α, which determines how many times smaller the gap should be before it is considered as a tie. The attribute-splitting condition becomes: when α × (H(x ia ) − H(x ib )) < (H(x ib ) − H(x ic )), the attribution x ia shall be split as a node. Obviously, this approach uses two extra elements, α and x ic , which bring extra computation to the original algorithm.
In addition to the tie-breaking threshold τ, n min is the number of instances a leaf should observe between split attempts. In other words, τ is a user-defined value to control the tree-growing speed, and n min is a user-defined value to control the interval time to check node-splitting. The former is used to constrain tree size and the latter is used to constrain the learning speed. In order to optimize accuracy, tree size, and speed for decision tree learning, first of all, an example is given for demonstrating the relationship among these three factors for data streams.
In this example, the testing datasets are synthetic added bias class. We use MOA to generate the tested datasets. LED24 is the nominal data structure and Waveform21 is the numeric data structure. Both datasets share the origins with the sample generators donated by UCI machine learning repository. LED24 problem uses 24 binary attributes to classify 10 different classes. The goal of Waveform21 task is to differentiate between three different classes of waveform, each of which is generated from a combination of two or three base waves. It has 21 numeric attributes. The data stream problem is simulated by large number of instances, which are as many as one million for both datasets. The accuracy, tree size, and time are recorded with changing the pre-defined values of τ and n min. From Table 6.1, we can see that:
-
In general, the bigger tree size brings a higher accuracy, even caused by the over-fitting problem, but taking more learning time.
-
τ is proposed to control the tree size growing. A bigger τ brings a faster tree size growth, but longer computation time. But because the memory is limited, the tree size does not increase while τ reaches a threshold (τ = 0.7 for LED24; τ = 0.4 for Waveform21).
-
n min is proposed to control the learning time. A bigger n min brings a faster learning speed, but smaller tree size and lower accuracy.
However, the only way to detect the best tie-breaking threshold for a certain task is trying all the possibilities in VFDT. It is impractical for real-world applications. In this chapter, we propose the adaptive tie-breaking threshold using the incremental optimization methodology. The breakthrough of our work is the optimized node-splitting control, which will be specified in the following sections.
Incrementally Optimized Decision Tree
Motivation and Overview
OVFDT, which is based on the original VFDT design, is implemented on a test-then-train approach (Fig. 6.1) for classifying continuously arriving data streams, even for infinite data streams. The whole test-then-train process is synchronized such that when the data stream arrives, one segment at a time, the decision tree is being tested first for prediction output and training (which is also known as updating) of the decision tree then occurs incrementally. The description of testing process will be explained in section “OVFDT Testing Approach” in detail, and the training process will be explained in section “OVFDT Training Approach”. Ideally, the node-splitting test updates the tree model in order to improve the accuracy, while a bigger tree model takes longer computation time. The situation to do the node-splitting check is when the number of instances in a leaf l is greater than the pre-defined value n min.

A test-then-train OVFDT workflow
Imperfect data streams, including noisy data and bias class distribution, decline the performance of VFDT. Figure 6.2 shows the results of accuracy, tree size, and computation time using VFDT, the same dataset structure added with imperfect values. The ideal stream is free from noise and has a uniform proportion of class samples, which is rare in real world. From the experiment result comparing ideal data streams to imperfect data streams, we conclude lemma 1:

VFDT performance for: (a) ideal data, (b) data with noise, (c) data with noise and bias. X-axis presents the accuracy and y-axis the number of samples
Lemma 1
Imperfections in data streams worsen the performance of VFDT. The tree size and the computation time are increased, but the accuracy is declined. In other words, the optimization goal is to increase the accuracy but not enlarge the tree size, within an acceptable computation time. Naturally a bigger tree size takes longer computation time. For this reason, the computation time is dependent on the tree size.
In the decision tree model, each path from the root to a leaf is considered as a way to present a rule. To ensure a high accuracy, there must be sufficient number of rules, which is the number of leaves in the tree model. Suppose Hoeffding Tree (HT) is the decision tree algorithm using Hoeffding bound (HB) as the node-splitting test. Let \( \mathrm{Accu}\left({\mathrm{HT}}_{m^{th}}\right) \) be the accuracy function for the decision tree structure HT at the mth node-splitting estimation, and let \( \mathrm{Size}\left({\mathrm{HT}}_{m^{th}}\right) \) be the tree size, then:
where R(⋅) is a mapping function of tree size to accuracy. Most incremental optimization functions can be expressed as the sum of several sub-objective functions:
where Φ m : χ ⊂ ℝp →ℝ is a continuously differentiable function whose domain χ is a nonempty, convex and closed set. We consider the following optimization problems:
Based on Lemma 1, we propose a solution to optimize the decision tree structure by improving the original VFDT that:
The tree model is updated when a node-splitting appears. Original VFDT considers the HB as the only index to split node. However, it is not enough. In terms of the above optimization goal, OVFDT proposes an optimized node-splitting control during the tree-building process.
OVFDT Test-Then-Train Process
Data streams are open-ended problem that traditional sampling strategies are not viable in the non-stopping streams scenario. OVFDT is an improved version of the original VFDT and its extensions using HB to decide the node-splitting. The most significant contribution is OVFDT that can obtain an optimal tree structure by balancing the accuracy and tree size. It is useful for data mining especially in the events of the tree size explosion, when the decision tree is subject to imperfect streams including noisy data and imbalanced class distribution.
HT algorithms run a test-then-train approach to build a decision tree mode. When new stream arrives, it will be sorted from the root to a predicted leaf. Comparing the predictive class to the true class of this data stream, we can maintain an error matrix for every tree leaf in the testing process. In terms of the stored statistics matrix, the decision tree model is being updated in the training process. Table 6.2 presents the differences between OVFDT and HT algorithms (including the original VFDT and its extensions). Figure 6.3 shows the input parameters and the output of OVFDT and the approach presented as pseudo code.

Pseudo code of input and the test-then-train approach
OVFDT Testing Approach
Suppose X is a vector of d attributes, and y is the class with k different values included in the data streams. For decision tree prediction learning tasks, the learning goal is to induce a function of , where \( {\widehat{y}}_k \) is the predicted class by Hoeffding Tree (HT) according to a functional tree leaf strategy Ƒ. When a new data stream (X, y k ) arrives, it traverses from the root of the decision tree to an existing leaf by the current decision tree structure, provided that the root has existed initially. Otherwise, the heuristic function is used to constructs a tree model with a single root node.
When new instance comes, it will be sorted from the root to a leaf by the current tree model. The classifier on the leaf can further enhance the prediction accuracy via the embedded Naïve Bayes classifier. OVFDT embed four different classifiers \( \mathcal{\digamma} \) to improve the performance of prediction. They are Majority Class (\( {\digamma}^{\mathrm{MC}} \)), Naïve Bayes (\( {\digamma}^{\mathrm{NB}} \)), Weighted Naïve Bayes (\( {\digamma}^{\mathrm{WNB}} \)) and Adaptive (\( {\digamma}^{\mathrm{Adaptive}} \)).
Suppose \( {\widehat{y}}_k \) the predicted class value and y k is actual class in data streams with a vector of attribute X. A sufficient statistics matrix stores the number of passed-by samples, which contain attribute X i with a value x ij belonging to a certain y k so far. We call this statistics table Observed Class Distribution (OCD) matrix. The size of OCD is J × K, where J is the total number of distinct values for attribute X i and K is the number of distinct class values. Suppose n ijk is the sufficient statistic that reflects the number of attribute X i with a value x ij belonging to class y k . Therefore, OCD on node X i is defined as:
For a certain leaf that attribute X i with a value of x ij :
Majority Class classifier chooses the class with the maximum value as the predicted class in a leaf. Thus, \( {\digamma}^{\mathrm{MC}} \) predicts the class with a value that:
Naïve Bayes classifier chooses the class with the maximum possibility computed by Naïve Bayes, as the predictive class in a leaf. The formula of Naïve Bayes is:
OCD of leaf with value x ij is updated incrementally. Thus, \( {\digamma}^{\mathrm{NB}} \) predicts the class with a value that:
Weighted Naïve Bayes classifier proposes to reduce the effect of imbalanced class distribution. It chooses the class with the maximum possibility computed by weighted Naïve Bayes, as the predictive class in a leaf:
OCD of leaf with value x ij is updated. Thus, \( {\digamma}^{\mathrm{WNB}} \) predicts the class with a value that:
Adaptive classifier chooses the classifier with the least error from the alternative \( {\digamma}^{\mathrm{MC}} \), \( {\digamma}^{\mathrm{NB}} \) and \( {\digamma}^{\mathrm{WNB}} \). For each time classifier is implemented on the leaf, suppose γ is the index of classifier implementation on leaf assigned to x ij , and suppose Γ is the total number of implementation, where Γ\( ={\sum}_{k=1}^K{n}_{ijk} \). The error of a classifier \( \mathcal{\digamma} \) to class y k is calculated by:
Therefore, \( {\digamma}^{\mathrm{Adaptive}} \) predicts the class with a value that is chosen by the classifier \( \mathcal{\digamma} \) with minimum error:
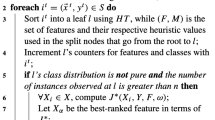
After the stream traverses the whole HT, it is assigned to a predicted class \( {\widehat{y}}_k \), which according to the functional tree leaf Ƒ. Comparing the predicted class \( {\widehat{y}}_k \) to the actual class y k , the statistics of correctly C T and incorrectly C F prediction are updated immediately. Meanwhile, the sufficient statistics n ijk , which is a count of attribute x i with value j belongs to class y k , are updated in each node. This series of actions is so called a testing approach in this chapter. Figure 6.4 gives the pseudo code of this approach. According to the functional tree leaf strategy, the current HT sorts a newly arrived sample (X, y k ) from the root to a predicted leaf \( {\hat{y}}_k \). Comparing the predicted class \( {\hat{y}}_k \) to the actual class y k , the sequential-error statistics of C T and C F prediction are updated immediately.

Pseudo code of testing approach
To store OCD for OVFDT, \( {\digamma}^{\mathrm{MC}} \), \( {\digamma}^{\mathrm{NB}} \), and \( {\digamma}^{\mathrm{WNB}} \) require memory proportional to O (N ⋅ I ⋅ J ⋅ K ), where N is the number of nodes in tree model; I is the number of attributes; J is the maximum number of values per attribute; K is the number of classes. OCD of \( {\digamma}^{\mathrm{NB}} \) and \( {\digamma}^{\mathrm{WNB}} \) are converted from that of \( {\digamma}^{\mathrm{MC}} \). In other words, we don’t require extra memory to store three different OCD for \( {\digamma}^{\mathrm{Adaptive}} \) respectively. When required, it can be converted from \( {\digamma}^{\mathrm{MC}} \).
OVFDT Training Approach
Right after the testing approach, the training follows. Node-splitting estimation is used to initially decide if HT should be updated or not; that depends on the amount of samples received so far that can potentially be represented by additional underlying rules in the decision tree. In principle, the optimized node-splitting estimation should apply on every single new sample that arrives. Of course this will be too exhaustive, and it will slow down the tree-building process. Instead, a parameter n min is proposed in VFDT that only do the node-splitting estimation when n min examples have been observed on a leaf. In the node-splitting estimation, the tree model should be updated when a heuristic function H(⋅) chooses the most appropriate attribute with highest heuristic function value H(x a ) as a node-splitting according to HB and tie-breaking threshold. The heuristic function is implemented as an information gain here. This situ of node-splitting estimation constitutes to the so-called training phase.
The node-splitting test is modified to use a dynamic tie-breaking threshold τ, which restricts the attribute splitting as a decision node. The τ parameter traditionally is pre-configured with a default value defined by the user. The optimal value is usually not known until all of the possibilities in an experiment have been tried. An example has been presented in section “Relationship Among Accuracy, Tree Size, and Time”. Longitudinal testing of different values in advance is certainly not favorable in real-time applications. Instead, we assign a dynamic tie threshold, equal to the dynamic mean of HB at each pass of stream data, as the splitting threshold, which controls the node-splitting during the tree-building process. Tie-breaking that occurs close to the HB mean can effectively narrow the variance distribution. HB mean is calculated dynamically whenever new data arrives.
The estimation of splits and ties is only executed once for every n min (a user-supplied value) samples that arrive at a leaf. Instead of a pre-configured tie, OVFDT uses an adaptive tie that is calculated by incremental computing. At the i th node-splitting estimation, the HB estimates the sufficient statistics for a large enough sample size to split a new node, which corresponds to the leaf l. Let Т l be an adaptive tie corresponding to leaf l, within k estimations seen so far. Suppose μ l is a binary variable that takes the value of 1 if HB relates to leaf l, and 0 otherwise. T l is computed by:
To constrain HB fluctuation, an upper bound ТlUPPER and a lower bound ТlLOWER are proposed in the adaptive tie mechanism. The formulas are:
For lightweight operations, we propose an error-based pre-pruning mechanism for OVFDT, which stops non-informative split node before it splits into a new node. The pre-pruning takes into account the node-splitting error both globally and locally.
According to the optimization goal mentioned in section “Motivation and Overview”, besides the HB, we also consider the global and local accuracy in terms of the sequential-error statistics of C T and C F prediction computed by functional tree leaf. Let ∆C m be the difference between C T and C F , and m is the index of testing approach. Then ∆C m is computed by (6.4), which reflects the global accuracy of the current HT prediction on the newly arrived data streams. If ΔC m ≥ 0, the number of correct predictions is no less than the number of incorrect predictions in the current tree structure; otherwise, the current tree graph needs to be updated by node-splitting. In this approach, the statistics of correctly C T and incorrectly C F prediction are updated. Suppose ∆C m = C T − C F , which reflects the accuracy of HT. If ∆C declines, it means the global accuracy of current HT model worsens. Likewise, compare ∆C m and ∆C m+1 , the local accuracy is monitored during the node-splitting. If ∆C m is greater than ∆C m+1 , it means the current accuracy is declining locally. In this case, the HT should be updated to suit the newly arrival data streams.
Lemma 2 Monitor Global Accuracy
The model’s accuracy varies whenever a node splits and the tree structure is updated. Overall accuracy of current tree model is monitored during node-splitting by comparing the number of correctly and incorrectly predicted samples. The number of correctly predicted instances and otherwise is recorded as global performance indicators so far. This monitoring allows the global accuracy to be determined.
Lemma 3 Monitor Local Accuracy
The global accuracy can be tracked by comparing the number of correctly predicted samples with the number of wrongly predicted ones. Likewise, comparing the global accuracy measured at the current node-splitting estimation with the previous splitting, the increment in accuracy is being tracked dynamically. This monitoring allows us to check whether the current node-splitting is advantageous at each step by comparing with the previous step.
Figure 6.5 gives an example why our proposed pre-pruning takes into account both the local and the global accuracy in the incremental pruning. At the i th node-splitting estimation, the difference between correctly and incorrectly predicted classes was ∆C i , and ∆C i+1 was at i+1th estimation. (∆C i − ∆C i+1 ) was negative that the local accuracy of i+1th estimation was worse than its previous one, while both were on a global increasing trend. Hence, if accuracy is getting worse, it is necessary to update the HT structure.

Example of incremental pruning
Combining the prediction statistics gathered in the testing phase, Fig. 6.6 presents the pseudo code of the training phase in OVFDT in building an upright tree. The optimized node-splitting control is presented in Fig. 6.6 Line 7. In each node-splitting estimation process, HB value that relates to a leaf l is recorded. The recorded HB values are used to compute the adaptive tie, which uses the mean of HB to each leaf l, instead of a fixed user-defined value in VFDT.

Pseudo code of training approach
Evaluation
Evaluation Platform and Datasets
A Java package with OVFDT and an embedded MOA toolkit was constructed as a simulation platform for experiments. The running environment was a Windows 7 PC with Intel Quad 2.8GHz CPU and 8G RAM. In all of the experiments, the parameters of the algorithms were δ = 10−6 and n min = 200, which are default values suggested by MOA. δ is the allowable error in split decision and values closer to zero will take longer to decide; n min is the number of instances a leaf should observe between split attempts. The main goal of this section is to provide evidence of the improvement of OVFDT compared to the original VFDT.
The experimental datasets, including pure nominal datasets, pure numeric datasets, and mixed datasets, were either synthetics generated by the MOA Generator or extracted from real-world applications that are publicly available for download from the UCI repository. The descriptions of each experimental dataset are listed in Table 6.3. The generated datasets were also used in previous VFDT-related studies.
The testing ran using a test-then-train approach that is common in stream mining. When a new instance arrived that represented a segment of the incoming data stream, it was sorted by the tree model into a predicted class. This was the testing approach for deriving the predicted class via the latest form of the decision tree. Compared to the actual class label it belonged to, the tree model was updated in the training approach because the prediction accuracy was known. The decision tree can typically take either form of incoming data instances; if the instances are labeled they will be used for training or learning for the decision tree to update itself. If unlabeled, the instances are taken as unseen samples and a prediction is made in the testing phase. In our experiments, all instances were labeled because our objective was to measure the performance of model learning and prediction accuracy.
Synthetic Data
LED24 was generated by MOA. In the experiment, we added 10% noisy data to simulate imperfect data streams. The LED24 problem used 24 binary attributes to classify 10 different classes. Waveform was generated by the MOA Generator. The dataset was donated by David Aha to the UCI repository. The goal of the task was to differentiate between three different classes of Waveform. There were two types of waveform: Wave21 had 21 numeric attributes and Wave40 had 40 numeric attributes, all of which contained noise. Random Tree (RTS and RTC) was also generated by the MOA Generator. It built a decision tree by choosing attributes to split randomly and assigning a random class label to each leaf. As long as a tree was constructed, new samples were generated by assigning uniformly distributed random values to attributes. Those attributes determined the class label through the tree. Radial basis Function (RBFS and RBFC) is a fixed number of random centroids generator. A random position, a single standard deviation, a class label and weight are generated by a centroid.
UCI Data
Connect-4 contained all of the legal 8-ply positions in a two-player game of Connect-4. In the game, the player’s next move was not forced and the game was won once four chessmen were connected. Personal activity data (PAD) recorded the data streams collected from 4 sensors on the players’ bodies. Each sensor collected 3 numeric data. Cover Type was used to predict forest cover type from cartographic variables. Nursery was from a hierarchical decision model originally developed to rank applications for nursery schools. Because of its known underlying concept structure, this dataset can be useful for testing constructive learning induction and structure discovery algorithms.
Accuracy Comparison
Table 6.4 shows the comparison results of the accuracy tests. On average, OVFDT obtained a higher accuracy for the pure nominal datasets than the mixed datasets. For the numeric Waveform datasets, OVFDT also displayed better accuracy than the other VFDTs. This phenomenon was particularly obvious in OVFDT with the adaptive Functional Tree Leaf. For each dataset, a detailed comparison of its accuracy with the new arrival data streams is illustrated in the Appendix.
Our comparison of the four functional tree leaf strategies revealed that OVFDTADP generally had the highest accuracy in the most experimental datasets. An improvement comparison of functional tree leaf strategies is given in Table 6.5. The majority class functional tree leaf strategy was chosen as a benchmark. As a result, the adaptive functional tree leaf strategy obtained the best accuracy, with Ƒ Adaptive≻Ƒ WNB≻Ƒ NB≻Ƒ MC. This result appeared in both VFDT and OVFDT methods.
Tree Size Comparison
For all of the datasets, a comparison of tree size is shown in Table 6.6. For the pure nominal and mixed datasets, VFDT with a smaller τ generally had smaller tree sizes, but OVFDT obtained the smallest tree size with the pure numeric datasets. For each dataset, a detailed comparison of accuracy with the new arrival data streams is illustrated in the Appendix. The charts in the Appendix essentially show the performance on the y-axis and the dataset samples on the x-axis.
Tree Learning Time Comparison
A comparison of tree learning time is shown in Table 6.7. For all of the datasets, the majority class functional tree leaf consumed the least time in this experiment due to its simplicity. The computation times of the other three Functional Tree Leaves, using the Naïve Bayes classifier, were close.
Stability of Functional Tree Leaf in OVFDT
Stability is related to the degree of variance in the prediction results. A stable model is translated into a useful model and its prediction accuracy over the same datasets does not vary significantly, regardless of how many times it is tested. To show the stability of different functional tree leaf mechanisms in OVFDT, we ran the evaluation based on those synthetic datasets ten times. In this experiment, the synthetic datasets were generated using different random seeds. Hence, the generated data streams had exactly the same data formats, but different random values. The average and its variance of accuracy in the testing are shown in Table 6.8. Generally, datasets that only contained the homogenous attribute types (numeric attributes only or nominal attributes only) had smaller variances. The proposed adaptive functional tree leaf obtained the least variances because it had more stable and comparable accuracy than the other functional tree leaves.
Optimal Tree Model
Figure 6.7 presents a comparison of the optima ratio, which was calculated by optimization function accuracy/tree size in (6.5). The higher this ratio is, the better the optimal result. Comparing VFDT to OVFDT, the ratios of OVFDT were clearly higher than those of VFDT. In other words, the optimal tree structures were achieved in the pure numeric and mixed datasets.

Comparison of optimal tree structures between VFDT and OVFDT
Conclusion
Imperfect data stream leads to tree size explosion and detrimental accuracy problems. In original VFDT, a tie-breaking threshold that takes a user-defined value is proposed to alleviate this problem by controlling the node-splitting process that is a way of tree growth. But there is no single default value that always works well and that user-defined value is static throughout the stream mining operation. In this chapter, we propose an extended version of VFDT which we called it Optimized-VFDT (OVFDT) algorithm that uses an adaptive tie mechanism to automatically search for an optimized amount of tree node-splitting, balancing the accuracy, the tree size and the time, during the tree-building process. The optimized node-splitting mechanism controls the attribute-splitting estimation incrementally. Balancing between the accuracy and tree size is important, as stream mining is supposed to operate in limited memory computing environment and a reasonable accuracy is needed. It is a known contradiction that high accuracy requires a large tree with many decision paths, and too sparse the decision tree results in poor accuracy. The experiment results show that OVFDT meet the optimization goal and achieve a better performance gain ratio in terms of high prediction accuracy and compact tree size than the other VFDTs. That is, with the minimum tree size, OVFDT can achieve the highest possible accuracy. This advantage can be technically accomplished by means of simple incremental optimization mechanisms as described in this chapter. They are light-weighted and suitable for incremental learning. The contribution is significant because OVFDT can potentially be further modified into other variants of VFDT models in various applications, while the best possible (optimal) accuracy and minimum tree size can always be guaranteed.
Reference
Bifet, A., & Gavalda, R. (2007 ). Learning from Time-Changing Data with Adaptive Windowing. In Proceedings of SIAM International Conference on Data Mining (pp. 443–448).
Bifet A., Geoff, H., Bernhard, P., Jesse, R., Philipp, K., Hardy, K., Timm, J., & Thomas, S. (2001). MOA: A Real-Time Analytics Open Source Framework. In Machine Learning and Knowledge Discovery in Databases (pp. 617–620). Lecture Notes in Computer Science, Volume 6913/2011.
Bifet, A., Holmes, G., Pfahringer, B., Kirkby, R., & Gavalda, R. (2009). New Ensemble Methods for Evolving Data Streams. In Proceedings 15th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (pp. 139–147). New York: ACM.
Elomaa, T. (1999). The Biases of Decision Tree Pruning Strategies, Advances in Intelligent Data Analysis (pp. 63–74). Lecture Notes in Computer Science, Volume 1642/1999. Berlin/Heidelberg: Springer.
Gama, J., & Kosina, P. (2011). Learning Decision Rules from Data Streams. In T. Walsh (Ed.), Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence – Volume Two (Vol. 2, pp. 1255–1260). Menlo Park: AAAI Press.
Gama J, Rocha R., & Medas P. (2003). Accurate Decision Trees for Mining High-Speed Data Streams. In Proceedings of the Ninth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (pp. 523–528). ACM, New York.
Geoffrey H., Richard K., & Bernhard P. (2005). Tie Breaking in Hoeffding Trees. In Proceedings Workshop W6: Second International Workshop on Knowledge Discovery in Data Streams (pp. 107–116).
Hartline J. R. K. (2008). Incremental Optimization (PhD Thesis). Faculty of the Graduate School, Cornell University.
Hashemi, S., & Yang, Y. (2009). Flexible Decision Tree for Data Stream Classification in the Presence of Concept Change, Noise and Missing Values. Data Mining and Knowledge Discovery, 19(1), 95–131.
Hulten G., & Domingos P. (2003). VFML – A Toolkit for Mining High-Speed Time-Changing Data Streams. http://www.cs.washington.edu/dm/vfml/
Hulten G., Spencer L., & Domingos P. (2001). Mining Time-Changing Data Streams. In Proceedings of the 7th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (pp. 97–106).
Mladenic D., & Grobelnik M. (1999). Feature Selection for Unbalanced Class Distribution and Naive Bayes, In Proceeding ICML ‘99 Proceedings of the Sixteenth International Conference on Machine Learning (pp. 258–267). ISBN 1-55860-612-2, Morgan Kaufmann.
Nitesh, C., Nathalie, J., & Alek, K. (2004). Special Issue on Learning from Imbalanced Data Sets. ACM SIGKDD Explorations, 6(1), 1–6.
Oza N., & Russell S. (2001). Online Bagging and Boosting. In Artificial Intelligence and Statistics (pp. 105–112). San Mateo: Morgan Kaufmann.
Pedro D., & Geoff H. (2000). Mining High-Speed Data Streams. In Proceeding of the Sixth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (pp. 71–80).
Pfahringer B., Holmes G., & Kirkby R. (2007). New Options for Hoeffding Trees. In Proceedings in Australian Conference on Artificial Intelligence (pp. 90–99).
Stefan H., Russel P., & Yun S. K. (2009). CBDT: A Concept Based Approach to Data Stream Mining (pp. 1006–1012). Lecture Notes in Computer Science, Volume 5476/2009.
Yang H., & Fong S. (2011). Moderated VFDT in Stream Mining Using Adaptive Tie Threshold and Incremental Pruning. In Proceedings of the 13th International Conference on Data Warehousing And Knowledge Discovery (pp. 471–483). Berlin/Heidelberg: Springer-Verlag.
Acknowledgment
The authors are thankful for the financial support from the research grants “Temporal Data Stream Mining by Using Incrementally Optimized Very Fast Decision Forest (iOVFDF)”, Grant no. MYRG2015-00128-FST offered by the University of Macau, FST, and RDAO, and “A scalable data stream mining methodology: stream-based holistic analytics and reasoning in parallel”, Grant no. FDCT-126/2014/A3, offered by FDCT Macau.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 The Author(s)
About this chapter

Cite this chapter
Yang, H., Fong, S. (2018). Incremental Optimization Mechanism for Constructing a Balanced Very Fast Decision Tree for Big Data. In: Moutinho, L., Sokele, M. (eds) Innovative Research Methodologies in Management. Palgrave Macmillan, Cham. https://doi.org/10.1007/978-3-319-64394-6_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-64394-6_6
Published:
Publisher Name: Palgrave Macmillan, Cham
Print ISBN: 978-3-319-64393-9
Online ISBN: 978-3-319-64394-6
eBook Packages: Business and ManagementBusiness and Management (R0)