
Abstract
A new direct Boundary Element (BEM) technique is established to analyze plates on tension-less elastic foundation. The soil is modeled as Winkler springs. The considered BEM is based on the formulation of shear deformable plate bending theory according to Reissner. The developed technique is based on coupling the PLPAK software with iterative process to eliminate tensile stresses underneath the considered plate. Tensile zones are redistributed until the final contact zone of plate is reached. Examples are tested and results are compared to analytical and previously published results to verify the proposed technique.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

1 Introduction
Solving plates on tensionless foundation can be divided into two main categories of solution. First solution is to solve the problem using iterative procedure to consider the miscontact between plate and foundation. Second solution is to embedded the contact problem in a system of nonlinear equations and solve it using optimization algorithm. Boundary element method (BEM) is widely used to solve plate on foundation problem. Katsikadelis and Armenakas [1] presented analysis of thin plates on elastic foundation. A BEM formulation based on shear deformable plates according to Reissner [2] was derived by Vander Weeën [3]. Rashed et al. [4,5,6] extended Vander Weeën formulation to model foundation plates.
Several studies are presented to solve plates on tensionless foundations. Weitsman [7] presented analysis of tensionless beams, or plates, and their supporting Winkler or Reissner subgrade due to concentrated loads. Celep [8] presented the behavior of elastic plates of rectangular shape on a tensionless Winkler foundation using auxiliary function. Galerkin’s method is used to reduce the problem to a system of algebraic equations. Li and Dempsey [9] used an iterative procedure to analyze unbonded contact of a square thin plate under centrally symmetric vertical loading on elastic Winkler or EHS foundation. Sapountzakis and Katsikadelis [10] presented boundary element solution for unilateral contact problems of thin elastic plates resting on linear or nonlinear subgrade by solving a system of nonlinear algebraic equations. Xiao et al. [11] presented a BE-LCEM solution for thin free edge plates on elastic half space with unilateral contact. Silva et al. [12] used finite element method to discretize the plate and foundation then used three alternative optimization linear complementary problems to solve plates on tensionless elastic foundations. T-element analysis of plates on unilateral elastic Winkler type foundation using hybrid-Trefftz finite element algorithm was presented by Jirousek [13]. Xiao [14] presented a BE-LCEM solution to solve unilateral free edges thick plates. Nonlinear bending behavior of Reissner-Mindlin plates with free edges resting on tensionless elastic foundations using admissible functions was presented by Hui-Shen and Yu [15]. Silveira et al. [16] presented a nonlinear analysis of structural elements under unilateral contact constrains studied by a Ritz approach using a mathematical programming technique. Results of finite element analysis of beam elements on unilateral elastic foundation using special zero thickness element designed for foundation modeling is presented by Torbacki [17]. Buczkowski and Torbacki [18] presented finite element analysis of plate on layered tensionless foundation. Kongtng and Sukawat [19] used the method of finite Hankel integral transform techniques for solving the mixed boundary value problem of unilaterally supported rectangular plates loaded by uniformly distributed load.
In this paper, an iterative procedure is developed to solve thick plates on tensionless Winkler foundation. The boundary element formulation is used to extract the stiffness matrix of the plate supported on Winkler springs. The main advantage of the proposed technique that it merge between the advantage of the boundary element method, modeling plate using integral equation, and the simplicity of finite element method, solving nonlinear equations iteratively in matrix form. One of the advantages of the proposed technique is its practicality. In the formulation of Xiao [19] although solving of thick plates on tensionless foundations, the results were not accurate near corners as it will be shown in the examples of this paper. Also, this formulation is suitable to be extended for solving plates on Winkler elastic-plastic foundations. Numerical examples are presented to verify efficiency and practicality of the proposed technique.
2 BEM for Plate on Winkler Foundation
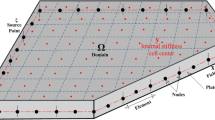
Formulation of direct boundary integral equation of the plate [6] based on Reissner plate bending theory [2] is used. Consider a general plate domain Ω and boundary Γ with internal Winkler cells as shown in Fig. 1. The indecial notation is used in this paper where the Greek indexes vary from 1 to 2 and Roman indexes vary from 1 to 3. The integral equation can be represented as follows:

General plate for BEM formulation of the plate.
Where Tij(ξ,x), Uij(ξ,x) are the two-point fundamental solution kernels for tractions and displacements respectively [3]. The two points ξ and x are the source and the field points respectively. uj(x) and tj(x) denote the boundary generalized displacements and tractions. Cij(ξ) is the jump term. The symbols ν and λ denote the plate Poison’s ratio and shear factor. c denotes the number of internal Winkler cells that having domain Ω, Fk denotes the Winkler cell two bending moments (F1 = Mxx, F2 = Myy) and column vertical force (F3 = F). The field point y denotes the point of the internal Winkler cell center.
After discretizing the boundary of the plate to NE quadratic elements each node has three unknowns. Due to internal Winkler cells inside the domain additional three unknowns are added, so another collocation scheme is carried out at each internal Winkler cell center to add additional equations. The collocation scheme is carried out as follows:
Where Y is a new source point located at each cell center.
Equations (1) and (2) after discretization of plate boundary can be re-written in a matrix form as follows:
Where [A]3N×3N, [A1]3Nc×3N, [A2]3N×3Nc, [A3]3Nc×3Nc and {RHS}3Nc×1 contains the coefficients of the integrals presented in Eqs. (1) and (2). [0]3N×3Nc, [I]3Nc×3Nc are the null and identity matrices respectively. The vector {u/t}3N×1 contains the unknown boundary values displacement or traction, the vector {F}3Nc×1 contains the unknown values of internal Winkler cell forces and {uc}3Nc×1 contains the unknown values of internal Winkler cell displacement. The relation between {u3Nc×1 and{F}3Nc×1 can be as follows:
Where \( \left[ {{\text{K}}^{\text{c}} } \right]_{{ 3 {\text{Nc}} \times 3 {\text{Nc}}}} \) is the stiffness matrix of the internal Winkler cells.
In order to extract the stiffness matrix of the plate like FEM. Since the stiffness matrix of the plate is independent on the loading, then neither the no domain load nor the cells area loading is considered. As a result of this assumption the vector {RHS}3Nc×1 will be zeros consequently, Eq. (3) can be re-written as follows:
In order to get {Fc}3Ncx1 represents a certain case of the stiffness {uc}3Ncx1 is forced to be unity. Cases of loading equal to the 3Nc are considered to extract the plate stiffness matrix as follows:
Where {Kp}3Ncx3Nc is the required plate stiffness matrix.
Winkler stiffness values of each cell are added as a diagonal matrix to the plate stiffness matrix [Kp] to extract [K Overall]3Nc×3Nc the overall stiffness of the plate rested on elastic foundation. Also condensed load vector of plate is computed {P plate} 3Nc ×1. The overall equilibrium equation can be written as follows:
3 Proposed Iterative Procedure
In this section, simulation of soil as tensionless material is established using a new iterative procedure to solve plate on tensionless foundation. Figure 2 demonstrates flowchart of the iterative procedure. The system of equations in Eq. (7) is solved then the internal forces of soil are computed. The internal forces of soil are used to get the most tensile stressed cell. Elimination procedure is used to eliminate the most tensile stressed cell DOF stiffness matrix to simulate the loss of contact between plate and soil. The system of equations is resolved. This iterative procedure is used until reaching the real contact zone i.e. no tensile stresses appear in the soil reactions. In order to optimize the solution the formulation is implemented into a computer code. It is worth to be noted that this procedure is valid also in solving plates on elastic perfectly plastic soil by applying a virtual load equal to the allowable compressive stress of the soil at the eliminated cells DOFs.

Flowchart for developed iterative procedure.
4 Numerical Examples
Example 1: Simply supported beam on tensionless Winkler foundation.
Consider the simply supported beam having the width sides of the plate restrained by one pinned element/side as shown in Fig. 3. The beam is subjected to concentrated moments M = 100 along its edges as shown in Fig. 3, Poisson’s ratio of the plate material is ν = 0, foundation Winkler stiffness parameter K is 71.68.

Simply supported beam resting on Winkler foundation and subjected to concentrated moments (M = 100) on its edges.
The simply supported beam is modeled as thick plate with plate dimensions a = 10, b = 1.0 and t = 0.4, the Young’s modulus is E = 106. The soil is modeled as Winkler with 40 cells as shown in Fig. 4. It has to be noted that any unit system is possible.

Beam proposed technique model on Winkler foundation.
The beam is solved by the proposed technique and results are compared to results obtained from Silva et al. [12]. It can be seen from results that the proposed technique of obtained the same contact length (x/a = 0.43) which was also obtained in [12]. In addition, deflection along centerline of the beam (x-axis) and contact reaction are in a good agreement with results of ref. [12] as shown in Figs. 5 and 6.

Deflection along the beam centerline in Example 1.

Contact reaction along the beam centerline in Example 1.
Example 2: Free edge square plate on tensionless Winkler foundation.
This example consists of free edges square plate. The side of plate is a = 400 cm. The Young’s modulus is E = 2.6x106 N/cm2, Poisson’s ratio of the plate material is (ν = 0.15). Different plate thicknesses (t) are employed 30,40,60,80,100 cm. The foundation stiffness parameter K is 500 N/cm3. Plate is loaded by patch distributed load q = 1000 N/cm2 over area of 20 cm × 20 cm at its center, as shown in Fig. 7. The plate is modeled as thick plate rested on Winkler foundation as shown in Fig. 7 with soil discretization as shown in Fig. 8.

Free edge square plate dimensions under patch load in Example 2.

Proposed technique model of Example 2.
Results are compared to results obtained in Xiao [14]. All models are solved with different thicknesses (30, 40, 60, 80,100 cm). Table 1 demonstrates the contact regions for different thicknesses of raft. Figures 9, 10, 11 and 12 demonstrate the deflection along diagonal strip (indicated in Fig. 7) for different thicknesses of raft, Xiao [14] results and FEM for both bilateral results (at left of graph) and unilateral results (at right of graph) are plotted also on these figures for the sake of comparison.

Deflection along the diagonal strip for plate thickness = 30 cm for all models.

Deflection along the diagonal strip for plate thickness = 40 cm for all models.

Deflection along the diagonal strip for plate thickness = 60 cm for all models.

Deflection along the diagonal strip for plate thickness = 80 cm for all models.
It can be seen from results that proposed technique obtained the same contact area that is obtained in [14] and in FEM. Deflection is in a good agreement with results of Xiao [14] except at corners, at which some inaccurate results due to singularity problems near boundary elements appear in the formulation of Xiao [14]. It can be seen that the presented formulation results are in good agreement with results from FEM. This demonstrates the advantages of the proposed technique over the formulation of Xiao [14].
5 Conclusions
In this paper, solving plates on tensionless Winkler soil is presented using an efficient technique. The plate stiffness matrix is extracted using boundary element formulation. An iterative technique is used to eliminate the tensile stresses.
Several examples are presented and from results it can be concluded that the main advantages of this technique is:
-
1.
The simplicity of dealing with the nonlinearity nature of the problem.
-
2.
Avoiding the stresses concentration zones appears in finite element solutions by using the advantages of boundary element formulation.
-
3.
Suitable to be extended to include solving plates on Winkler elastic-plastic foundations.
-
4.
Accurate results near corners unlike in the formulation of Xiao [14] as shown in the examples of this paper.
-
5.
Solving any geometry and any boundary conditions of the plate.
References
Katsikadelis, J.T., Armenakas, A.E.: Plates on elastic foundation by BIE method. J. Eng. Mech. 110, 1086–1105 (1984)
Reissner, E.: On bending of elastic plates. Quart. Appl. Mathe. 5, 55–68 (1947)
Vander Weeën, F.: Application of the boundary integral equation method to Reissner’s plate model. Int. J. Numer. Methods Eng. 18, 1–10 (1982)
Rashed, Y.F., Aliabadi, M.H., Brebbia, C.A.: The boundary element method for thick plates on a Winkler foundation. Int. J. Numer. Methods Eng. 41, 1435–1462 (1998)
Rashed, Y.F., Aliabadi, M.H.: Boundary element analysis of buildings foundation plates. Eng. Anal. Boundary Elem. 24, 201–206 (2000)
Rashed, Y.F.: A boundary/domain element method for analysis of building raft foundations. Eng. Anal. Boundary Elem. 29, 859–877 (2005)
Weitsman, Y.: On foundations that react on compression only. ASME J. Appl. Mech. 37, 1019–1030 (1970)
Celep, Z.: Rectangular plates resting on tensionless elastic foundation. J. Eng. Mech. 114, 2083–2092 (1988)
Hui, L., Dempsey, J.P.: Unbonded contact of a square plate on an elastic half-space or a Winkler foundation. ASME J. Appl. Mech. 55, 430–436 (1988)
Sapountzakis, E.J., Katsikadelis, J.T.: Unilaterally supported plates on elastic foundations by the boundary element method. ASME J. Appl. Mech. 59, 580–586 (1992)
Kexin, M., Suying, F., Xiao, J.: A BEM solution for plates on elastic half-space with unilateral contact. Eng. Anal. Boundary Elem. 23, 189–194 (1999)
Silva, A.R.D., Silveira, R.A.M., GonÇalves, P.B.: Numerical methods for analysis of plates on tensionless elastic foundations. Int. J. Solids Struct. 38, 2083–2100 (2001)
Jirousek, J., Zieliński, A.P., Wróblewski, A.: T–element analysis of plates on unilateral elastic Winkler–type foundation. Comput. Assist. Mech. Eng. Sci. 8, 343–358 (2001)
Xiao, J.R.: Boundary element analysis of unilateral supported Reissner plates on elastic foundations. Comput. Mech. 27, 1–10 (2001)
Shen, H.S., Yu, L.: Nonlinear bending behavior of Reissner-Mindlin plates with free edges resting on tensionless elastic foundations. Int. J. Solids Struct. 41, 4809–4825 (2004)
Silveira, R.A.M., Pereira, W.L.A., GonÇalves, P.B.: Nonlinear analysis of structural elements under unilateral contact constrains by a Ritz type approach. Int. J. Solids Struct. 45, 2629–2650 (2008)
Torbacki, W.: Numerical analysis of beams on unilateral elastic foundation. Arch. Mater. Sci. Eng. 29(2), 109–112 (2009)
Buczkowski, R., Torbacki, W.: Finite element analysis of plate on layered tensionless foundations. Arch. Civil Eng. LvI, 3 (2009)
Kongtong, P., Sukawat, D.: Coupled integral equations for uniformly loaded rectangular plates resting on unilateral supports. Int. J. Math. Anal. 7, 847–862 (2013)
Acknowledgements
This project was supported financially by the Science and Technology Development Fund (STDF), Egypt, Grant No 14910. The authors would like to acknowledge the support of (STDF).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Farid, A.F., Rashed, Y.F. (2018). Boundary Element Analysis of Shear-Deformable Plates on Tension-Less Winkler Foundation. In: Bouassida, M., Meguid, M. (eds) Ground Improvement and Earth Structures. GeoMEast 2017. Sustainable Civil Infrastructures. Springer, Cham. https://doi.org/10.1007/978-3-319-63889-8_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-63889-8_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-63888-1
Online ISBN: 978-3-319-63889-8
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)