
Abstract
Modern robotic manipulators play an essential role in industry, developing several tasks in an easy way, enhancing the accuracy of the final product and reducing the executing time. Also they can be found in other fields as aerospace industry, several medical applications, gaming industry, and so on. In particular, the parallel manipulators have acquired a great relevance in the last years. Indeed, many research activities and projects deal with the study and development of this type of robots. Nevertheless, usually, a bilateral communication between industry and research does not exist, even among the different existing research areas. This causes a lack of knowledge regarding works that have been carried out, the ones that are under development and the possible future investigations. Hence, once a specific field of knowledge has acquired a certain level of maturity, it is convenient to reflect its current state of the art. In this sense, the authors of this paper present a review of the different fields in which parallel manipulators have a significant participation, and also the most active research topics in the analysis and design of these robots. Besides, several contributions of the authors to this field are cited.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Robots
- Parallel manipulators
- State of the art
- Practical applications
- Design criteria
- Reconfigurable mechanism
1 Introduction
As known, in a parallel robot the end-effector is linked to the frame by means of independent kinematic chains called legs [1]. This closed-loop architecture has some advantages related to its high load/weight ratio, high stiffness along its workspace, low inertia, high velocities and accelerations and good accuracy. However compared their serial counterparts, they have a limited workspace and a complex kinematics due to the singularities associated to the parallel architecture.
The first modern application of a parallel robot was developed in 1928 by James E. Gwinett who patented [2] an ingenious design for the amusement industry. In 1942, Willard L.V. Pollard designed the first parallel robot for an industrial application (spray painting) [3]. In 1947, the engineer Eric Gough developed the parallel manipulator known as the Hexapod widely used for different applications. The system was originally designed for the Dunlop Tyres Company for tyre quality testing. In 1965, D. Stewart published a paper presenting a parallel robot with very similar characteristics to the one designed by Gough, to be used in flight simulators [4]. Due to their similarities, frequently the Hexapod is referred as the Gough-Stewart platform. Also, the engineer Klaus Cappel, developed and patented independently in 1967 other Hexapod also for flight simulation purposes.
2 Practical Applications of Parallel Robots
In this section some current applications of the parallel robots are presented. Also in [5], other industrial applications of these architectures are discussed.
-
Machine tools.
Machining operations are very demanding in terms of kinematic and dynamic specifications. Consequently, parallel architectures are a valuable option for this field. Between the different parallel kinematic machines (PKMs) developed in recent years, we highlight the machining centre Variax Hexacenter (Giddings and Lewis), and the Sprint Z 3-head (Technologie GmbH). The Octahedral Hexapod VOH-1000 (Ingersoll) with architecture similar to the Variax is also a five-axis machine tool based on the Hexapod. Variax has an accuracy of 11 µm and the Octahedral Hexapod of 20 µm. Other design of Ingersoll is the HOH-600, in which the tool has a horizontal plane. The Sprint Z 3-head allows the tool orientation in a range of ± 40° reaching a speed in end-effector of 80°/s.
Between the machining centres presented in [6] we highlight the Cosmo Centre PM-600 (Okuma), oriented to the production of aluminium dies. The DECKEL MAHO Pfronten TriCenter DMT100, has an hybrid architecture combining an 3-dof parallel manipulator and a 2-dof serial chain for milling. The Vertical Turning Machine Index V100 is used for milling and laser welding.
One of the most successful parallel robots is the Tricept (SMT Tricept AB). It has three actuated and one passive kinematic chains obtaining in the end-effector high stiffness and 2R1T motion pattern.
-
Pick and place.
Parallel robots are very competitive for pick & place applications where low mobility manipulators (less than 6-dof) capable to reach high speeds and accelerations are required. Normally robots with three translational degrees of freedom or four degrees of freedom (Schönflies motion) are required.
The first 3-dof spatial manipulator, the Delta robot [7], was developed in 1990 by Raymond Clavel. This robot has three equal kinematic chains containing a parallelogram. Three rotational motors located in the frame actuate the robot. Also, an actuated telescopic leg connecting the frame with the end-effector provides and additional uncoupled rotational degree of freedom. This concept has been used in successful robots as the IRB 340 FlexPicker (ABB) able to perform 150 pick & place cycles in less than one minute with a speed of 10 m/s and a maximum acceleration of 10 g. There are different variants of the Delta robot that use linear actuators [8] or able to change the orientation of their rotational actuators which is the case of the NUWAR robot (Western Australia University) capable of reaching accelerations of 600 m/s2. Other parallel robots that generate a 3T motion pattern are: STAR robot (Hervé and Sparacino), 3 − R RPaR robot of Maryland University (Stamper), 3 − U P U robot (Tsai and Joshi) and the Cartesian robot 3 − C RR designed simultaneously in Laval University (Kong and Gosselin) and California Riverside (Kim and Tsai).
Other robots in this field are the Paraplacer, which has a hybrid structure, the Triglide that is a variant of the Delta robot with linear actuators or the Hexa with 6 dof. Recently in the University of Montreal, [9] has been developed the DEXTAR robot, based on a kinematic structure 5R, which has the ability to change its configuration between its working modes in order to enlarge the opened workspace [10].
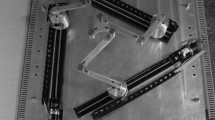
As said the so-called Shönflies motion, is quite demanded in pick & place operation. A recent design is the SMG (McGill University) [11]. The CompMech research group has also developed a prototype with Schönflies motion (Fig. 1) whose final dimensions were obtained from a multiobjective optimization [12].

Prototype of Schönflies parallel manipulator. CompMech research group, department of mechanical engineering UPV/EHU/
-
Automobile industry.
The automobile industry has been one of the pioneer fields in the use of robots in its production chains. Related to parallel manipulator, the Hexapod is again the most common architecture. Volkswagen in cooperation with Moog has implemented a testing bench in which this architecture is used to test suspension systems and to make fatigue analysis of different components. Also, the parallel robot F-200iB (Fanuc) is used for the elevation and positioning of vehicles.
In this sector, we highlight the MAST (Multi Axis Shaking Tables). These machines are able to generate in their end-effector a coupled motion of translations and rotations. They are widely used for the dynamic evaluation of vehicle components. In the last years, different MAST bases on parallel architectures have been developed. Basically they are based on the Hexapod or on a frame locating three or more linear actuators.
-
Medical applications.
Parallel robots have been also introduced in the medical, rehabilitation and surgical field. In [13] is presented a miniature robot for precision demanding spinal surgical operations. This robot has been the main module of the surgical system SpineAssist (Mazor Surgical Technologies).
In neurosurgery we highlight the parallel robot SurgiScope (ISIS, Intelligent Surgical Instruments & Systems). This robot is used as a telesurgery tool in neurosurgery.
-
Space applications
The Spherical Primary Optimal Telescope, SPOT, is part of the a research project started in 2003 in the Goddard Space Flight Centre, for developing new concepts for future spatial telescopes. The purpose is to design a robust architecture with three degrees of freedom, tip and tilt rotations and vertical translation, in order to move in a synchronized way the different modules that form the telescope mirror. The final solution is based on the Tripod robot with three kinematic chains and linear actuators.
The Aerospace Manufacturing Technology Centre (AMTC) of Canada is exploring the application of the Hexapod for drilling and milling aerospace materials and components.
-
Flight simulators
As cited in the introduction, one of the first applications of the parallel robots was their implementation in flight simulators. In recent years, we highlight the flight simulator GRACE - Generic Research Aircraft Cockpit Environment (National Aerospace Research Lab of Holland). It consists on a hexapod with reconfiguration capacity in order to simulate different aircraft conditions as the Airbus 330 or the Boeing 747-400.
-
Other applications.
High-speed camera. The Agile Eye is a spherical 3 − RRR parallel manipulator designed for locating a camera in its end-effector. It was designed at Laval University [14] obtaining a vision range of 140° with a torsion of ± 30°, reaching velocities and accelerations higher than 1000°/s and 20000°/s2 respectively.
Haptic devices. They are used to give force and even tactile feedback to the user of a virtual environment. Born for the gaming industry, for example the Novint Falcon parallel manipulator, nowadays they are being implemented in other sectors as the medical or industrial fields.
High precision miniaturized robots. In the IWF of Braunschweig University (Germany) some of these robots have been developed. As an example, the APIS robot is able to perform a planar motion with three degrees of freedom. Piezoelectric rotational motors actuate it. Other miniaturized parallel robot is MICABO with a 3T1R motion pattern. This robot has a 3-PRR architecture where the P joint is actuated via a piezoelectric linear actuator and the R pairs are compliant joints. These robots lie in the field of MEMS (Micro Electro Mechanical Systems) with a great development in recent years.
Cable-driven parallel manipulators. Usually these robots have a hexapod architecture but in this case, cables actuate them. The purpose is to obtain very light structures reaching high accelerations with low energy consumption. In [15] the capabilities of this class of robots are analysed focusing on the project Tendon-Based Stewart-Platforms in Theory and Application - SEGESTA. The prototype developed in this project has been implemented in Duisburg University for high-speed manipulability tests. Other potential applications for these robots are: portable rescue cranes [16], aerodynamic tests in wind tunnels [17], medical rehabilitation devices [18], etc.
Three degree of freedom parallel robots. In this category lie the manipulators for orienting a solid in the space and the manipulators with coupled degrees of freedom, as is the case of the 3-RPS and 3-PRS platforms. The most common architecture of this class of robots is an end-effector linked to the frame by three kinematic chains with R joints with axes intersecting in the centre of rotation of the end-effector. This is the case of the Agile Eye previously cited. Other architectures use SPS or UPU kinematic chains. Also, a spherical joint constraints the end-effector’s motion to a pure rotation. Some applications of these orientation robots are: solar panels and spatial antennas [19] or component manipulation [20]. Related the robots with coupled degrees of freedom, in [21] is presented a 1T2R robot for telescopic applications that was also implemented in a machine tool and in a vehicle-testing bench. This class of robots has parasitic motions due to the dependency between some output parameters.
3 Kinematic Design Criteria
In this section, the most relevant kinematic criteria for the design of parallel manipulators are reviewed.
-
Workspace assessment
For the workspace calculation of parallel robots, in literature we can find three types of methods: the discretization methods, the geometrical methods and the analytical methods.
The discretization methods [22] generate a mesh of nodes. Each node corresponds to a location of the end-effector. Then, by solving the inverse kinematic problem it is checked if the node belongs to the manipulator’s workspace or not. It has to be taken into account that the inverse kinematic problem is quite straight in parallel robots. These methods are quite easy to implement in a computer but they have a high computational cost and the accuracy depends on the refinement of the mesh. In this category, we can find the Interval Analysis method [23].
The geometrical methods are widely used to obtain the boundaries of the workspace. The first step is the definition of the surfaces generated be the ending point of each kinematic chain. Then, the surfaces are intersected to obtain the complete workspace. These methods are limited to the calculation of 3D workspaces.
Finally, the analytical methods are based on the mathematical resolution of the non-linear constraint equations derived from the manipulator’s topology. The complexity of the workspace calculation depends highly on the architecture of the manipulator under study.
In this research field, the CompMech research group has developed the GIM software that calculates and analyses the workspace of fully parallel manipulators [24]. It is based on a hybrid analytical-discrete procedure that evaluates a high density of discrete nodes with relatively low computational effort. The key of the method is that it uses the analytical equations of each kinematic chain of the manipulator. GIM allows the visualization and analysis of the workspace but also of other kinematic entities as the jointspace, reduced configuration space and singularity maps.
-
Multiobjective optimisation.
When a robot is being designed, one of the main criteria is to maximize the workspace. However, other criteria need to be also taken into account as the regularity of this workspace [25] or other additional ones in order to improve the performance of the robot. To take all into account, a multiobjective optimisation procedure has to be done. This optimisation finds a good compromise between all these criteria. To do this, some authors use the Pareto optimality and other authors try to find an optimal solution taking into account the minimum predefined requisites for each function. In [26] are optimized the workspace, the dexterity and the energy consumption of the actuators.
Recently, the CompMech research group has presented a design methodology to increase the workspace (including also a multiobjective optimisation step) based on the assessment of the non-singular transitions [27]. These transitions appear in the cuspidal manipulators joining different solutions of the direct kinematic problem without loss of control of the robot [28].
-
Structural synthesis
The structural synthesis analyses and selects the kinematic chains suitable to obtain a particular motion pattern in the end-effector desired for the application to be used. The motion pattern defines the number and type of the degrees of freedom in the end-effector as well as the directions of the pure rotations and translations. There are three approaches for the structural synthesis: the screw theory, the theory of groups of displacement and the linear transformation theory.
Most of the designers use the second one as it works with finite displacements. This theory uses the mathematical properties of the Lie Group. J. Hervé proposed it for the structural synthesis of mechanisms. It uses the so-called motion generators that are kinematic chains that generate a particular motion in the end-effector. These generators verify the properties of the Group Algebra. So, in the general category of rigid-body displacements are: translational subgroups (dimension 1, 2 and 3), rotational, cylindrical, Schönflies, etc. For a parallel robot, each leg is a motion generator applied to the end-effector. From these motion generators the final motion pattern of the manipulator is obtained. In any case, in order to select the best architecture for a parallel robot, additionally to the motion pattern some other characteristics have to be taken into account: fabricability, economical cost, maintenance and wear, etc. A brief review in this field can be found in [29].
-
Accuracy
Accuracy and sensitivity indicators are particularly relevant in order to evaluate the quality of a design. Accuracy tries to quantify the influence of some error sources as the clearances in the joints and manufacturing and assembling tolerances in the real position of the end-effector. Generally, the errors derived from the manufacturing and assembling tolerances are compensated via calibration techniques. Different procedures have been proposed for the analysis of other factors as the clearances in the joints and actuators [30].
Sensitivity quantifies the different influence of the design parameters in the positioning of the end-effector. In [31] a method for sensitivity analysis based on the interval linearization is presented.
-
Multioperacionality
Currently, designers are focusing on increasing the flexibility and versatility of the manipulators. The goal is to design robots able to adapt to different tasks. This is a promising research line quite active in recent years. In the PARAGRIP project (RWTH Aachen) [32], the object to be manipulated becomes the end-effector after different kinematic chains are linked to it. Other strategies are based on varying the dimensions of the links or blocking different actuators or kinematic joints in the manipulator [33]. These new design criteria will be introduced more in detail in the next section.
4 Towards the Modular Reconfigurable Robots
Traditionally, the design of robotic systems has focused on achieving robust and efficient models, optimized for a specific task. However, at the end of the last century, a novel idea started to grow up which consisted in designing machines and mechanisms capable of carrying out several tasks, thus offering higher flexibility and versatility. To sum up, the target is to get multioperational systems in such a way that the robots can change their configuration to execute multiple tasks. Nowadays, the technical chance exists to design and install them in several fields such as mounting small series of large components in the aeronautical and eolic field, flexible tasks in packing and folding, deployable antennas and trusses, biomedical and rehabilitation applications, etc.
Bearing this in mind, the authors are leading the MoMaR research project. The main objective of this new design approach is to develop a methodology for modular design of reconfigurable parallel manipulators with variable topology. The design of parallel manipulators capable of achieving the highest number of motion patterns in their moving platform is proposed, basing on the reconfigurability of 6 degree of freedom manipulators. This reconfiguring ability is accomplished by blocking different actuators of the manipulator. In this way, a simpler machine is obtained from the operative point of view. Because of working with a lower number of actuators in each operation mode the manipulator will have a simpler kinematics and accordingly a faster and more efficient control.
For the structural synthesis of the reconfigurable parallel robots, the authors propose a modular design approach (Fig. 2). From the joints and links, the kinematic chains are generated. These chains and different typologies of end-effectors will be implemented in a virtual library of GIM software. This library will be used by the designer to define the architecture of the reconfigurable parallel robot. As future work, the analysis capabilities of GIM software will be increased to evaluate the kinematic design criteria presented in Sect. 3 for this class of parallel robots. This will help the designer to define the dimensional parameters of the links and joints of the parallel robot.

Modular design approach: joints, kinematic chains and manipulators.
5 Conclusions
In this paper, the authors present a bibliographical review about research lines, new designs and applications of parallel robots in recent years. Also, in this paper the main kinematic design criteria of parallel robots are presented and discussed. They are focused in improving the designs in terms of workspace, singularity avoidance, etc. Some references related the works of the CompMech research group in these fields are included. Finally, the authors highlight the potentiality of reconfigurable parallel robots in order to increase the flexibility and versatility of these parallel architectures.
References
Merlet JP (2006) Parallel robots. Springer, Heidelberg
Gwinett JE (1928) Amusement device. US Patent No. 1,789,680
Pollard W (1942) Position controlling apparatus. US Patent No. 2,286,571
Stewart D (1965) A platform with six degrees of freedom. Proc IMechE 180(15):371–385
Patel YD, George PM (2012) Parallel Manipulators Applications-A Survey. Mod Mech Eng 2:57–64
Pandilov Z, Dukovski V (2012) Parallel kinematics machine tools: Overview- from history to the future. Ann Fac Eng Hunedoara-Int J Eng
Clavel R (1990) Device for the movement and positioning of an element in space. US Patent No. 4,976,582
Stock M, Miller K (2003) Optimal kinematic design of spatial parallel manipulators application to linear delta robot. ASME J Mech Des 125(2):292–301
Campos L, Bourbonnais F, Bonev IA, Bigras P (2010) Development of a five-bar parallel robot with large workspace. In: Proceedings of the ASME 2010 international design engineering technical conferences and computers and information in engineering (IDETC/CIE 2010), Montreal, Canada, 15–18 August 2010
Macho E, Altuzarra O, Pinto C, Hernández A (2008) Workspace associated to assembly modes of the 5r planar parallel manipulator. Robotica 26:395–403
Angeles J, Caro S, Khan W, Morozov A (2006) Kinetostatic design of an innovative schönflies-motion generator. Proc Inst Mech Eng Part C J Mech Eng Sci 220(7):935–943
Altuzarra O, Hernandez A, Salgado O, Angeles J (2009) Multiobjective optimum design of a symmetric parallel Schonflies motion generator. ASME J Mech Des 131(3)
Shoham M, Burman M, Zehavi E et al (2003) Bone mounted miniature robot for surgical procedures: Concept and clinical applications. IEEE Trans Robot Autom 19(5):893–901
Gosselin C, Hamel J (1994) The agile eye: A high-performance three-degree-of-freedom camera-orienting device. In: IEEE international conference on robotics and automation, pp 781–786
Hiller M, Fang S, Mielczarek S, Verhoeven R, Franitza D (2005) Design, analysis and realization of tendon-based parallel manipulators. Mech Mach Theory 40:429–445
Daney D, Merlet J-P (2010) A portable, modular parallel wire crane for rescue operations. In: IEEE international conference on robotics and automation (ICRA), Anchorage, USA
Sturm C, Bruckmann T, Schramm D, Hiller M (2011) Optimization of the wire length for a skid actuated wire based parallel robot. In: 13th world congress in mechanism and machine science, Guanajuato, México, 19–25 June 2011
Homma K, Fukuda O, Sugawara J, Nagata Y, Usuba M (2003) A wire-driven leg rehabilitation system: Development of a 4-DOF experimental system. In: Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003)
Robertson J (2006) Application of the Trio-Tri-Star carpal Wrist for use in Solar Array Tracking Mechanism for the Momentum-eXchange. NASA Marshall Space Flight Center
Callegari M, Carbonari L, Palmieri G, Palpacelli M-C (2013) Parallel wrists for enhancing grasping performance. In: Carbone, G. (eds.) Grasping in robotics. Springer, Heidelberg, pp 189–219
Carretero JA, Podhorodeski R, Nahon MA, Gosselin CM (2000) Kinematic analysis and optimization of a new three degree of freedom parallel manipulator. J Mech Des 122(1):17–24
Masory O, Wang J (1995) Workspace evaluation of Stewart platforms. Adv Robot 9(4):443–461
Merlet J-P (2009) Interval analysis for certified numerical solution of problems in robotics. Int J Appl Math Comput Sci 19(3):399–412
Macho E, Pinto C, Amezua E, Hernández A (2011) Software tool to compute, analyze and visualize workspaces of parallel kinematics robots. Adv Robot 25(6):675–698
Li Y, Xu Q, (2007) Design and application of a new 3-DOF translational parallel manipulator. In: IEEE workshop on advanced robotics and its social impacts (ARSO 2007) doi:10.1109/ARSO.2007.4531432
Altuzarra O, Pinto C, Sandru B, Hernández A (2011) Optimal dimensioning for parallel manipulators: Workspace, dexterity and energy. ASME J Mech Des 133(4), 041007-7
Hernández A, Altuzarra O, Petuya V, Macho E (2009) Defining conditions for nonsingular transitions between assembly modes. IEEE Trans Rob 25(6):1438–1447
Urízar M, Petuya V, Amezua E, Hernández A (2014) Characterizing the configuration space of the 3-SPS-S spatial orientation parallel manipulator. Meccanica 49(5):1101–1114
Meng X, Gao F, Wu S, Ge QF (2014) Type synthesis of parallel robotic mechanisms: Framework and brief review. Mech Mach Theory 78:177–186
Chen G, Wang H, Lin Z (2013) A unified approach to the accuracy analysis of planar parallel manipulators both with input uncertainties and joint clearance. Mech Mach Theory 64:1–17
Tannous M, Caro S, Goldsztejn A (2014) Sensitivity analysis of parallel manipulators using an interval linearization method. Mech Mach Theory 71:93–114
Müller R, Riedel M, Vette M, Corves B, Esser M, Hüsing M (2010) Reconfigurable self-optimising handling system. In: Ratchev S (eds) Precision assembly technologies and systems. Springer, Heidelberg, pp 255–262
Grosch P, Di Gregorio R, López J, Thomas F (2010) Motion planning for a novel reconfigurable parallel manipulator with lockable revolute joints. In: IEEE international conference on robotics and automation (ICRA2010), Alaska, USA
Acknowledgments
The authors wish to acknowledge the financial support received from the Spanish Government through the “Ministerio de Economía y Competitividad” (Project DPI2015-67626-P (MINECO/FEDER, UE)), the financial support from the University of the Basque Country (UPV/EHU) under the program UFI 11/29 and the support to the research group, through the project with ref. IT949-16, given by the “Departamento de Educación, Política Lingüística y Cultura” of the Regional Government of the Basque Country.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Hernández, A., Urízar, M., Macho, E., Petuya, V. (2018). Parallel Manipulators: Practical Applications and Kinematic Design Criteria. Towards the Modular Reconfigurable Robots. In: Dede, M., İtik, M., Lovasz, EC., Kiper, G. (eds) Mechanisms, Transmissions and Applications. IFToMM 2017. Mechanisms and Machine Science, vol 52. Springer, Cham. https://doi.org/10.1007/978-3-319-60702-3_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-60702-3_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-60701-6
Online ISBN: 978-3-319-60702-3
eBook Packages: EngineeringEngineering (R0)