
Abstract
This paper presents a method to assess nitrogen levels, a nitrogen nutrition index (NNI), in corn crops (Zea mays) using multispectral remote sensing imagery. The multispectral sensors used were four spectral bands only. The experiments were compared with nitrogen levels sensed in the field. The corn crops were divided into three nitrogen fertilization levels (70, 140 and 210 \(\mathrm{kg N}\cdot \mathrm{ha}^{-1}\)) into three replicates. In this sense, we propose a method to infer nitrogen levels in corn crops by using airborne multispectral sensors and machine learning techniques. The presented results offered a simple model to estimate nitrogen with low-cost technologies (UAVs and multispectral cameras only) in small to medium size areas of corn crops.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Nitrogen (N) is one of the most important nutrients in agriculture to improve the crop yield. In corn crops is especially important. Furthermore, the appropriate dosage is also important since it can be a waste the excess of applying N in crops, but the lack of N implies a compromise in the yield. In this sense, it is important the usage of low-cost strategies to infer the N requirements in order to do a positive impact in the correct supply of N. In addition, it is well known that the excessive use of fertilizers (including N) should be avoided to minimize environmental impacts [3].
For this purpose, N critical concentration term (\(\%N_{c}\)) was proposed and used in several articles to estimate the minimum amount of nitrogen required for each crop to produce the maximum aerial biomass at a given time [7, 10, 11].
Several authors have shown that \(\%N_{c}\) declines as a function of aerial biomass accumulation (W) [1]. Several models have been proposed to estimate N critical concentration. In this paper, the \(N_{c}-W\) model by [11] was used in order to estimate the N critical as a decreasing function of biomass (W). The rule is:
The Nitrogen Nutrition Index (NNI) is the ratio between the actual nitrogen concentration (%Na) and the ideal N concentration (%Nc) of a crop having the same biomass and whose growth is not limited by N availability [8].
From Eqs. 1–3, we can say that: \(NNI=f(N_{a},\mathrm {W})\) only if \(W\le 22\) t / ha since \(W>22\) t / ha is not defined.
The Nitrogen concentration is estimated by hyperspectral indices [3] in plants. In this paper, a method with low-cost multispectral cameras is shown for a specific crop (corn). In this sense, several vegetation indices (VIs) have been used to estimate biophysical variables.
Different variables have been used to characterize the nitrogen status of a crop in order to support a decision in fertilization management. Among them, the most popular are the chlorophyll content measurements of the leaves [5].
The main objective of this paper is to assess the nitrogen nutrition in maize crops using multispectral sensors only and machine learning, avoiding the traditional method by estimating nitrogen with higher cost solutions like destructive methods, chlorophyll measurements, studies of soil, among others.
For this purpose, we present in this paper two similar methods to estimate NNI values:
-
1.
Estimate the NNI by its theoretical formula with multispectral sensors and biomass data (W).
-
2.
Estimate the NNI directly by multispectral sensors with machine learning techniques.
At the end, we want to compare these two methods in order to measure the best scenario in terms of accuracy. Ground truth information is provided by measurements of biomass and nitrogen levels produced in a field laboratory. The cheapest scenario is the second since it implies a straightforward inference: we only need multispectral indices and some nitrogen ground truth values. Each pixel of the multispectral images is represented as a function of the form \(Y\approx f(X,\beta )\), where X represents the information provided by the multispectral sensors and \(\beta \) are the parameters of the model. It is noteworthy to say that, this model is created for corn crops and the model should be adjusted to others crops since the levels of \(\%N_{c}\) for other crops are different. In addition, the method works in similar regions (similar sea level, latitude, and longitude). The soil type in the region also implies a difference in the study.
2 Materials and Methods
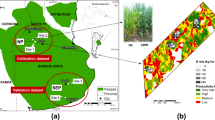
Nine corn plots \(25\,\mathrm{m}\times 5\,\mathrm{m}\) were considered. Each block has one kind of nitrogen treatment. Three blocks with 70 \(\mathrm{N}\cdot \mathrm{ha}^{-1}\), other three blocks with 140 \(\mathrm{N}\cdot \mathrm{ha}^{-1}\) (which is considered as a normal treatment) and 210 \(\mathrm{N}\cdot \mathrm{ha}^{-1}\) (which is considered excessive). The crops were considered as temporal. In this sense, additional irrigation was not provided.
The field was sown on June 1, 2016, and the N was applied on July 31, 2016.
Two flights with the cameras were done on August 9 and September 2, 2016.
A field management plan can be viewed on Fig. 2.
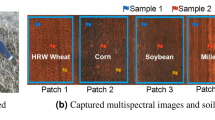
The imagery was captured with easy-acquiring cameras in RGB channels (by a GoPro camera), and NIR band was obtained by a low-cost MaPIR-NIR camera. The composition was performed in Pix4D software. The reason about the usage of a GoPro camera is the weight for the quad-copter. Other cheaper cameras can also be used.
We used two airborne quad-copters equipped with the cameras in two different flights (one by each camera) since the cameras have different exposition times. One of the quad-copters is illustrated in the Fig. 1.

One of the quad-copters considered (named as “Q1”). Each model requires one li-po battery which perform until 15 min of flight. However, to preserve life of the battery, each flight with the cameras was performed in less than 6 min.
The process to compose the map was conducted with the Datamapper software in order to obtain the ortho-mosaic.
Several multispectral vegetation indices were used. These indices are summarized in the Table 1.
Reflectance for each band (red, green, blue and near-infrared) was obtained with the calibration procedure described in [9]. Reflectance values are given by:
where t is time during a flight, \(t_{0}\) is the time before to the flight and \(DN_{T}\) means digital numbers viewing the crops, \(DN_{R}\) are digital numbers viewing the reference panel, \(\theta _{t}\) is the solar zenith angle at the time t, and \(R_{R}\) is the reflectance factor of the reference panel. This procedure is important to normalize the multispectral data in order to reduce the bias originated by the sun position.

Nine plots of corn were considered. Three different treatments were applied. In the image, ND is a region with a deficient treatment of N (70 \(\mathrm{N}\cdot \mathrm{ha}^{-1}\)). NA is adequate (140 \(\mathrm{N}\cdot \mathrm{ha}^{-1}\)), and NE is excessive (210 \(\mathrm{N}\cdot \mathrm{ha}^{-1}\)).
2.1 Estimating NNI with Formula
This estimation considers the traditional formula of NNI, where NNI is a ratio between the \(\%N_{a}\) and the \(\%N_{c}\) concentration. In this sense, nine \(\%N_{a}\) ground truth values were taken from leaves with destructive methods. \(\%N_{c}\) were obtained by a regression model and the biomass ground truth values. In the first step, W is estimated by a random forest regression and the \(N_{c}\) is inferred from the Eqs. 1 and 2.
A block diagram of this proposed method is illustrated in the Fig. 3.
For testing, four bands were required as inputs: Red, Blue, Green and NIR. the vegetation indices of the Table 1 are calculated automatically from the four bands.

Block diagram of the Formula-Based model. \(N_{a}\) and \(N_{c}\) are estimated with ML techniques. \(N_{c}\) requires an extra step: the estimation is obtained from biomass and biomass is estimated from four bands and vegetation indices like MTVI.

Block diagram of the machine learning model. This method is a short way to estimate NNI. It only uses NNI ground truth values to perform the estimation. It uses random forest regression with NNI ground truth values as labels.
2.2 Estimating NNI with Machine Learning Techniques
This method is more straightforward (Fig. 4). The estimation is based on a random forest regression method [2] with the NNI ground truth values as labels. The inputs are the same: RGB-Nir values and the vegetation indices from the Table 1. Others methods like SVM (espilon-SVR regression with RBF as base kernel), Multilayer Perceptron (the number of hidden layers was equal to the number of attributes), and multilinear regression were also tested. Results showed a better performance with random forest method as equal to multilayer perceptrons. We used 100 trees as main parameter of the random forest regression method. To avoid over-fitting problems, we tested initially with 30% of the data for training and the rest for testing. Results were not far with respect to the reported in the paper. The reported ones were with ten fold cross scheme to validate the results. Regression values diminished about 5%. We chose random forest empirically, the model selection problem is not part of our method, in this case, we are more interested in a straightforward and low-cost method to estimate NNI. The goal is an easy way to learn the method. The model is transferable to other kind of crops, repeating the training phase with the proper multi spectral and NNI values.
3 Results
In the Fig. 5 we present a comparison between the two proposed models. The axis correspond to the NNI values for each NNI estimation values in each flight. \(R^2\) value is greater than 96% in both flights. The Root Mean Squared Error (RMSE) is 0.0216 for the first flight and 0.0137 for the second flight. The sum of squared error of prediction (SSE) is of 0.0033 in the first flight and the SSE in the second flight is of 0.0013. In this sense we prefer the machine learning based model since it is easier in terms of training regarding method one. In addition, we only need some NNI values of ground truth for the training stage, whereas the Formula-based model requires two values (\(\%N_a\) and W).

A comparison between the two proposed models. The correlation suggests that short model based on ML techniques is almost equal to the formula-based model which requires extra information.
Numerical results about the estimation of nitrogen are summarized in the Table 2. A comparison graph of the machine learning model against the ground truth values is illustrated in the Fig. 6. A comparison between the results of NNI real values and the estimated values with the two models is illustrated in the Figs. 7 and 8. It is noteworthy to say that the \(R^{2}\) value was improved in the second flight in both methods. The RMSE values for the first flight with the formula-Based model and the ML model were 0.0367 and 0.0294 respectively. Analogously, The SSE values were 0.0094 and 0.0061. In the second flight this values were improved. RMSE values were 0.0351 and 0.0444 for the formula and the ML model respectively. SSE values were 0.0086 and 0.0138 The reason of the improvement of \(R^{2}\) can be due to the N absorption. On the first flight, the dosage of nitrogen was applied only nine days before. Results about nitrogen are slightly noisier in the first flight. In the second flight, results were more consistent and the prediction was improved. The formula based model were better than the ML model in the second flight, however, the SSE is still low (0.013) and the correlation values is still high (\(R^{2}=96\%\)).

Comparison between NNI values for each crop region.

Results of the NNI estimation via RFR algorithm for the first flight. The ML model improves the results with respect to the formula based model even when the nitrogen dosage was early applied.

Results of the NNI estimation via RFR algorithm for the second flight. In the second flight, the formula based model is better as expected, since it uses more information. However, the ML model is also accurate.
4 Discussion
It is interesting the improvement of the model when the dosage of N has more time. The second flight was done in the earring stage of the corn, whereas the first flight was done in the V10 stage. The earring stage is particularly more stable in prediction. We only have two measurements of N but this information is still enough to predict the NNI values in the crops. One week is not a good time to evaluate the absorption of nitrogen. The reason is due to urea is hydrolyzed (yielding ammonium and ammonia) with a half-life of 1.9 days at 3.5 \(^\circ \)C when is applied in the field [12]; under controlled conditions, urea mixed with the soil was hydrolyzed with a half-life of 22, 15 and 6 h at 4, 10 and 20 \(^\circ \)C [12]. Although the crop immediately absorbs ammonium from soil solution, the translocation process of N from roots to leaves may take a time in order to be observed optically as change in intensity of green in leaves. The uptake of N after urea application in corn was not statistically different at V6 between control and side-dressing applied in V5 phenology stage [15].
If we observe the two flights, there is an acceptable correlation (better in the second) if we want to predict the absorbed nitrogen in the plants. Although the prediction is local, the cost of flying and training is low.
5 Conclusions and Future Work
A method to infer nitrogen levels in corn crops was proposed. UAVs used can draw up to 5 ha of crops. Since the UAVs performed flights in 50–70 m high, the resolution was 3 cm per pixel. The method is based on random forest regression method and including several linear regressions in order to establish some correlation between biomass and Nitrogen critical values. The method utilizes multispectral imagery only with low-cost and easy-acquiring cameras. Results showed that the models predict with an \(R^2= 96\)% when the nitrogen was absorbed by the crops. There are several future avenues for this model. One of them is the inclusion of other variables in order to expand the inference to chlorophyll and comparing the NNI results with chlorophyll levels (Chlorophyll is usually a common method to infer nitrogen levels in crops). Another avenue is the study of corn in several stages in order to perform a preventive method for applying nitrogen in early stages. It includes the possibility of creating an ML model with several stages included as a whole. Finally, it is important to increase the coverage area of crops. This can be addressed by using fixed wing UAVs.
References
Bagheri, N., Ahmadi, H., Alavipanah, S.K., Omid, M.: Multispectral remote sensing for site-specific nitrogen fertilizer management. Pesquisa Agropecuária Brasileira 48(10), 1394–1401 (2013)
Breiman, L.: Random forests. Mach. Learn. 45(1), 5–32 (2001)
Cilia, C., Panigada, C., Rossini, M., Meroni, M., Busetto, L., Amaducci, S., Boschetti, M., Picchi, V., Colombo, R.: Nitrogen status assessment for variable rate fertilization in maize through hyperspectral imagery. Remote Sens. 6(7), 6549–6565 (2014)
Gitelson, A., Merzlyak, M.: Remote sensing of chlorophyll concentration in higher plant leaves. Adv. Space Res. 22, 689–692 (1998)
Guerif, M., Houlés, V., Balet, F.: Remote sensing and detection of nitrogen status in crops. application to precise nitrogen fertilization. In: 4th International Symposium on Intelligent Information Technology in Agriculture, Beijing, October 2007
Haboudane, D., Miller, J.R., Pattey, E., Zarco-Tejada, P.J., Strachan, I.B.: Hyperspectral vegetation indices and novel algorithms for predicting green lai of crop canopies: modeling and validation in the context of precision agriculture. Remote Sens. Environ. 90, 337–352 (2004)
Herrmann, A., Taube, F.: The range of the critical nitrogen dilution curve for maize (zea mays l.) can be extended until silage maturity. Agron. J. 96, 1131–1138 (2004)
Lemaire, G., Gastal, F.: N uptake and distribution in plant canopies. In: Lemaire, G. (ed.) Diagnosis of the Nitrogen Status in Crops, pp. 3–43. Springer, Heidelberg (1997)
Miura, T., Huete, A.R.: Performance of three reflectance calibration methods for airborne hyperspectral spectrometer data. Sensors 9(2), 794–813 (2009)
Peng, Y., Peng, Y., Li, X., Li, C.: Determination of the critical soil mineral nitrogen concentration for maximizing maize grain yield. Plant Soil 372(1), 41–51 (2013)
Plénet, D., Lemaire, G.: Relationships between dynamics of nitrogen uptake and dry matter accumulation in maize crops. Determination of critical N concentration. Plant Soil 216(1), 65–82 (1999)
Recous, S., Fresneau, C., Faurie, G., Mary, B.: The fate of labelled 15N urea and ammonium nitrate applied to a winter wheat crop. Plant Soil 112(2), 205–214 (1988)
Rondeaux, G., Steven, M., Baret, F.: Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 55, 95–107 (1996)
Rouse, J.W., Haas, R.H., Schell, J.A., Deering, D.W.: Monitoring vegetation systems in the great plains with ERTS. In: NASA Goddard Space Flight Center 3d ERTS-1 Symposium, pp. 309–317 (1974)
Sangoi, L., Ernani, P.R., da Silva, P.R.F.: Maize response to nitrogen fertilization timing in two tillage systems in a soil with high organic matter content. Revista Brasileira de Ci do Solo 31, 507–517 (2007)
Tucker, C.J.: Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 8, 127–150 (1979)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Arroyo, J.A., Gomez-Castaneda, C., Ruiz, E., de Cote, E.M., Gavi, F., Sucar, L.E. (2017). Assessing Nitrogen Nutrition in Corn Crops with Airborne Multispectral Sensors. In: Benferhat, S., Tabia, K., Ali, M. (eds) Advances in Artificial Intelligence: From Theory to Practice. IEA/AIE 2017. Lecture Notes in Computer Science(), vol 10351. Springer, Cham. https://doi.org/10.1007/978-3-319-60045-1_28
Download citation
DOI: https://doi.org/10.1007/978-3-319-60045-1_28
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-60044-4
Online ISBN: 978-3-319-60045-1
eBook Packages: Computer ScienceComputer Science (R0)