
Abstract
This paper deals with the optimal control of membrane fouling allowing the maximization of the total water production of a MBR system over a given period of time. The main objective is to find the optimal switching sequence of filtration and backwash cycles that mitigates membrane fouling and maintains a good performance of the process. The key contribution of our work is in the synthesis of a generic and robust optimal control that can be applied in practice to a large number of different MBR processes.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Membrane bioreactor technology (MBR) is the combination of a bioreactor process and a membrane filtration system. The membrane maintains the microorganisms and the solid particles in the biological tank. Thus, there is no need to recirculate the microorganisms as in the conventional systems and the quality of the effluent is better. However, membranes are inevitably subject to fouling due to the retention of particles onto and in the membrane pores. Membrane fouling leads to productivity reduction, increase in the cleaning downtime and membrane life span shortness. Therefore, it is essential to control membrane fouling in order to ensure an optimized MBR system functioning. Over the last decades, one of the main interests of research in MBR was finding sustainable membrane fouling control strategies [1]. In a recent work by Cogan et al. [2, 3], an analytical approach applying Pontryagin’s maximum principle has been presented to predict the optimal instants of switching between backwash and filtration periods that maximize the overall water production of a specific model of a microfiltration process over a given period of time. However, the optimal control analysis of Cogan et al. is questionable because the transversality condition of the Maximum Principle is not verified. In the present work, we revisit this problem and we give the optimal control strategy for a large class of MBR systems.
2 Modeling of Membrane Fouling
To capture the dynamic behavior of the membrane fouling, we use a mathematical model that has been proved, in a previous work [4], to be generic enough to be used for optimization and control purposes. Care was taken to use a generic fouling model subject to general applicable hypotheses in order to obtain a generic optimal control synthesis. In the present work, it is assumed that the membrane fouling is only due to the particle deposition onto the membrane surface. Let m be the mass of the cake layer formed during the water filtration. The dynamic of m during filtration follows:
During backwash, the dynamic of the mass due to detachment can be written as follows:
The water flow rate that passes through the membrane is modeled by a function which only depends on the accumulated mass onto the membrane surface:
3 The Optimal Control Synthesis and Numerical Results
The MBR is a switching process between two functioning modes: filtration and backwash. For this reason, by convention, we consider a control u that takes values 1 during filtration period and −1 during backwash. Then, the dynamic of the fouling layer formed by the attachment of a mass m onto the membrane surface can be written as follows:
The aim of this work is to determine the optimal switching between the two functioning modes that maximize the water production of the MBR process over a time interval [0;T]. Then, the objective function of the optimal control problem can be expressed as:
Using the Pontryagin Maximum Principle [5], we established that the optimal control sequence is defined as:
with \( \bar{m} \), \( \bar{T} \) and \( \bar{u} \) some values which are derived from the optimal synthesis (whose expressions are not presented here, cf. [6] for detailed calculations). To summarize, according to the position of \( m(t) \) with respect to \( \bar{m} \), the membrane filtration process operates as follows: The process operates in filtration (\( u = 1 \), if the membrane is still poorly fouled (\( m(t) < \bar{m} \))) or in Backwash (\( u = - 1 \), if the membrane is considered quite fouled (\( m\left( t \right) > \bar{m} \))) until it reaches the singular arc (defined by \( \bar{u} \) and \( \bar{m} \)) and stay on it (\( m(t) = \bar{m} \)) by applying the constant control (\( u = \bar{u} \)) until the switching time \( \bar{T} \) is reached. After the time \( \bar{T} \), it is optimal to filtrate until the terminal time T. Note, however, that the singular control, \( \bar{u} \), has no physical meaning in practice (the process must operate either in filtration or in backwash). Therefore, we have to find the optimal switching between filtration and backwash to approximate the singular control \( \bar{u} \) such that \( m(t) \) remains close to \( \bar{m} \). To do so, a first strategy consists in considering that \( \bar{u} \) is the percentage of filtration time (\( T_{f} \)) over an operating cycle (\( T_{p} \)), such that:
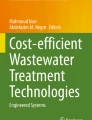
and where \( T_{SA} \) is the total time for which it is optimal to apply the constant control \( \bar{u} \) and \( N \) the number of cycles fixed by the user over the time-period \( T_{SA} \). Notice that in our original work (cf. [6]), we proposed an optimal control for a completely general model where functions \( f_{1} \), \( f_{2} \), \( g \) are only defined by their qualitative properties. In the present paper, we restrict our attention to specific functions \( f_{1} \), \( f_{2} \), \( g \) defined in Sect. 2 with parameters values reported in Table 1 and a prediction horizon of 10 h. Figure 1 shows the theoretical optimal control \( u(t) \) over T for a given initial condition \( (m_{0} = 10^{ - 3} {\text{g}} ) \). Since, \( m_{0} \) is lower than \( \bar{m} = 4\, {\text{g}} \), the optimal strategy is to filtrate until \( m(t) \) reaches \( \bar{m} \). Then the singular control \( \bar{u} = 0,86 \) is applied until \( \bar{T} = 9.96 \,{\text{h}} \), before finally switching back to filtration until \( T \) is reached. The total water produced over \( T \) is then about 650.36 litres (see Fig. 1). However, a classical strategy recommended by the membrane suppliers (9 mn filtration, 1 mn Backwash) can produce only 506 litres. Because it has no physical meaning to apply controls that are different than −1 or +1, we investigate the degradation of the optimal strategy when we take into account such practical considerations. For that, we plotted in Fig. 2 the total water production \( (J) \) of the MBR process as a function of the number \( N \) of backwash/filtration cycles. As expected, for large \( N \), \( J \) is enhanced and get closer to the optimal solution and the mean of the mass accumulated onto the membrane surface decreases and tends to \( \bar{m} \). An example of control when N = 20 is represented in the Fig. 3.

(A) The theoretical optimal control sequence over T. (B) The corresponding mass accumulated. (C) The corresponding water production

(A) The total water production of the MBR process as a function of N (the number of filtration/backwash sequence). (B) The mean mass accumulated as a function of N (the number of filtration/backwash sequence)

(A) The control sequence for N = 20. (B) The green line is the corresponding mass accumulated; the red line is the optimal mass accumulated. (C) The green line is the corresponding water production; the red line is the optimal water production (Color figure online)
4 Conclusion
The optimal strategy obtained using the Pontryagin Maximum Principle improves the water production of the MBR process compared to a classical operating strategy recommended by the membrane suppliers. The main advantage of the optimal control approach proposed here is that it has been synthesized for a very large class of models, essentially defined by qualitative properties of the fouling model functions.
References
Iorhemen OT, Hamza RA, Tay JH (2016) Membrane Bioreactor (MBR) technology for wastewater treatment and reclamation: membrane fouling. Membranes 6(2):33
Cogan N, Chellam S (2014) A method for determining the optimal back-washing frequency and duration for dead-end microfiltration. J Membr Sci 469:410–417
Cogan N et al (2016) Optimal backwashing in dead-end bacterial microfiltration with irreversible attachment mediated by extracellular polymeric substances production. J Membr Sci 520:337–344
Kalboussi N, Harmand J, Ben Amar N, Ellouze F (2016) A comparative study of three membrane fouling models - towards a generic model for optimization purposes. In: CARI 2016, Tunis, Tunisia
Gamkrelidze R, Pontrjagin LS, Boltjanskij VG (1964) The mathematical theory of optimal processes. Macmillan Company, New York
Kalbussi N, et al (2016) Optimal control of filtration and back wash under membrane clogging. https://hal.archives-ouvertes.fr/hal-01393233
Acknowledgment
The authors would like to thank TREASURE (cf. www.inra.fr/treasure).
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Kalboussi, N., Harmand, J., Ellouze, F., Ben Amar, N. (2017). Optimal Scheduling and Fouling Control in Membrane Bioreactor. In: Mannina, G. (eds) Frontiers in Wastewater Treatment and Modelling. FICWTM 2017. Lecture Notes in Civil Engineering , vol 4. Springer, Cham. https://doi.org/10.1007/978-3-319-58421-8_38
Download citation
DOI: https://doi.org/10.1007/978-3-319-58421-8_38
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-58420-1
Online ISBN: 978-3-319-58421-8
eBook Packages: EngineeringEngineering (R0)