
Abstract
This report aims at providing guidelines for setting up field monitoring programs for landslides. Recognizing that many parameters may be involved in landslide monitoring, the report concentrates on ground displacement, rainfall, soil moisture and groundwater conditions as the key elements. The types of instrumentations involved and their field installations are presented. The options of using automated electrical or optical fiber sensor systems are described. A few cases of applying fully automated field monitoring schemes for slope stability monitoring are presented to demonstrate the capabilities of currently available techniques.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
This report will first present a series of questions and answers. The questions are those likely to be raised by readers who are not familiar with landslide monitoring. This arrangement enables the answers to be located easily by following the questions. The background information leading to the outline of how we conduct field landslide monitoring is presented by the following three questions.
2 What Is a Landslide?
According to Cruden (1991), the term landslide denotes “the movement of a mass of rock, debris or earth down a slope”. The International Geotechnical Societies and United Nations Educational, Scientific and Cultural Organization (UNESCO) created a Working Party (WP) and published directory of World Landslide Inventory (WLI). A landslide can be classified (Varnes 1978; Cruden and Varnes 1996; WP/WLI 1990, 1993) by two criteria:
-
The type of movement (falls, topples, slides spreads, flows), and
-
The type of material involved in the movement (rock, debris, earth).
Combining movement and material type terms allows an appropriately descriptive landslide name to be formulated. This classification method is widely used throughout the world, and will be followed in this report.
3 What Triggers a Landslide?
Cruden and Varnes (1996) indicated three broad types of landslide processes or causes:
-
increases in shear stress,
-
contributions to low strength, and
-
reduction in material strength.
The processes and characteristics that contribute to landslides fall into four categories: geological causes, morphological causes, physical causes and human causes. While there may be multiple causes for a landslide, there can be only one trigger (Varnes 1978). Wieczorek (1996) stated that a trigger is “an external stimulus that causes a near-immediate response in the form of a landslide by rapidly increasing the stress or reducing the strength of slope material”. In some cases the landslide may occur without an apparent attributable trigger because of a variety or combination of causes, such as chemical or physical weathering of material, that gradually bring the slope to failure. The requisite short time frame of cause and effect is the critical element in the identification of a landslide trigger. According to Wieczorek (1996), the most common natural landslide triggers include intense rainfall, rapid snowmelt, water-level changes, volcanic eruptions, and earthquake shaking. Human activities such as excavation for road cuts and irrigation can also trigger landslides. This report however, will not be dealing with landslides triggered by volcanic eruptions or earthquake shaking.
4 Why Landslide Monitoring?
Intuitively, the goal of field monitoring is the identification of the cause(s) of an unstable slope or the forensic investigation of an earlier landslide. This goal can be difficult and sometimes impossible to accomplish, because of the time involved and sheer scale of the dimensions of a landslide. With this background in mind, various monitoring schemes have been used for the following:
-
Determining the depth and shape of the sliding mass in a developing landslide.
-
Determining the strength parameters and design of remedial measures.
-
Determining the lateral and vertical movements, including rate of movements, within a sliding mass.
-
Measuring groundwater table, soil moisture content or pore water pressure as a basis for effective stress analysis.
-
Observing marginal natural or excavated slopes to evaluate the effects of construction or rainfall on slope stability.
-
Observing and evaluating the effectiveness of control or slope stabilization measures, and
-
Using the measurement data as a basis for warnings of impending danger.
5 Key Elements in Landslides Monitoring
The types of physical quantities involved in landslide monitoring can be many. This is especially true for slope surface measurements, such as ground cracking, tilting and heaving, in addition to displacement. The key elements that have a strong relationship with ground stability include ground displacement (especially underground displacement), rainfall, soil moisture and groundwater conditions. Monitoring of these parameters is likely to yield useful information as to the state of stability of a given slope. The reasons behind these measurements and procedures for their execution are now described.
5.1 Underground Lateral Displacement
Measurement of underground lateral displacement is useful because the results reveal the depth and thickness of slide shear zones, and the magnitude, rate and direction of landslide movement. A commonly used method for underground lateral displacement measurement is to use inclinometer casing. The method involves:
-
1.
Installing the inclinometer casing in a vertical or near vertical position. The inclinometer casing should extend beyond the expected shear zone. One or multiple borings along the central axis of the landslide should be selected for inclinometer casing installation.
-
2.
Use a traversing probe (inclinometer probe, IP) to measure the deflection of the inclinometer casing induced by ground displacement.
The inclinometer casing (shown in Fig. 1) can be made of ABS (Acrylonitrile Butadiene Styrene) or aluminum; their typical diameters range from 48 to 85 mm. The interior of the inclinometer casing has four longitudinal wheel-grooves spaced 90° apart to guide the inclinometer probe. Only one set of opposite grooves, in the anticipated direction of displacement, is used. For installation of the inclinometer casing, the following procedure is generally used:
-
1.
Drill a borehole with a diameter large enough to insert the inclinometer casing.
-
2.
Fill the casing with water to overcome buoyancy, if groundwater or drilling fluids are present in the borehole. Avoid applying forces to or twisting the top of the casing.

The ABS inclinometer casing (Roctest)
Fix the inclinometer casing in place by filling the space between the casing and borehole with cement grout or a granular material. In general, grouting is preferred. Grouting ensures that the annular space is reliably free of voids and soft zones. Use non-shrink, cement-bentonite grout with stiffness compatible to the surrounding material. Table 1 shows the recommended grout mix for various ground conditions. The grouting can be conducted using a tremie pipe, using a procedure shown in Fig. 2. Use sand or gravel as granular backfill, when monitoring is to be carried out immediately after casing installation and no time is available for the grout to cure; avoid bridging or voids in the granular backfill.

Casing insertion and grouting with a tremie pipe (slope indicator)
Figure 3 shows an inclinometer probe (IP) and its signal cable. Markers are engraved in the signal cable to indicate the depth of the probe when taking readings. The spring-loaded wheels are compatible with the wheel-grooves in the inclinometer casing (see Fig. 1). To take readings, the inclinometer probe is first inserted into the bottom of the inclinometer casing. The probe readings are taken in successive 50-cm increments (distance between the wheels) as the probe is pulled up. The weight of the probe and its cable assures that the signal cable is straight because of the pull and the marker properly reflects the depth of the probe. The inclinometer probe reading shows the amount of tilt (θ) of the inclinometer probe in the casing. Figure 4 shows a person taking inclinometer probe readings in the field with a wireless readout/data logging unit. Figure 5 shows the principles of inclinometer operation and its data interpretation. In this figure, δθ = change of θ in comparison to the initial reading.

The inclinometer probe (slope indicator)

Taking inclinometer probe readings in the field (DECL, Taipei, Taiwan)

Principles of inclinometer operation and its data interpretation (Mikkelsen 1996)

A tipping bucket rain gauge (DECL, Taipei, Taiwan)
5.2 Rainfall Monitoring
Figure 6 shows a picture of a tipping bucket rain gauge often used to measure the amount of rainfall. The rain gauge consists of a funnel that collects and channels the precipitation into a small container. After a pre-set amount of precipitation falls, the lever tips, dumping the collected water and sending an electrical signal.
5.3 Groundwater Monitoring
Casagrande-type open-end standpipe piezometers, as schematically shown in Fig. 7, are commonly used to monitor groundwater level in a borehole. The open-end at the tip of a plastic pipe, typically made of a porous or slotted tube, is inserted to the bottom of a borehole. The space between the open-end and borehole is filled with sand as a filter. Groundwater enters the standpipe through the porous tube. A tape dropped into the plastic pipe is used to measure the water level in the pipe. A time lag may exist between the water level within the pipe and the surrounding groundwater. Alternatively, the effects of groundwater are directly measured as pore water pressure. A diaphragm type of pressure sensor is used to measure the water pressure. The amount of diaphragm deflection induced by water pressure is sensed by an electrical strain gage (e.g., vibrating wire strain gage). A vibrating wire piezometer is schematically shown in Fig. 8. The time lag is this case is minimal.

Casagrande-type open-end standpipe piezometer (Mikkelsen 1996)

A vibrating wire piezometer (Mikkelsen 1996)
6 Automation of Field Monitoring
Automated data logging and transmission can be useful in many ways. For monitoring in remote areas, the automation can minimize both the cost and sometimes the danger of reaching the sensor locations and take readings manually. A fully automated field monitoring system (Fig. 9) may consist of:
-
Electrical sensors, such as in-place-inclinometers, rain gauges and piezometers;
-
Automated Data Analysis System (ADAS);
-
Power supply (battery + solar panel or other forms of power-generating unit);
-
Data transmission system.

A fully automated field monitoring system
The ADAS serves the following functions:
-
Regulates excitation voltage for sensors,
-
Multiplexing installed sensors,
-
Performs analog/digital conversion,
-
Data storage,
-
Transmits data via a communication system (i.e., internet, GSM, WiFi).
For automated ground displacement monitoring, electrical in-place inclinometers (IPI) as shown in Fig. 10 are often used. A string of in-place inclinometers are connected with rods and permanently inserted in the inclinometer casing. Readings can be taken with an ADAS. Vibrating wire piezometers can be used with the ADAS for automated pore water pressure measurements (Fig. 11).

Field installation of in-place inclinometers (DECL, Taipei, Taiwan)

The vibrating wire piezometer (DECL. Taipei, Taiwan)
7 Field Monitoring Using Fiber-Optic Sensors
Optical fibres are made of silica, with a diameter about the same as a human hair, and can transmit light over long distances with very little loss of fidelity. Optical fibres comprise two essential components: a core surrounded by an annular cladding. The core of the optical fibre serves to guide light along the length of the optical fibre. The cladding has a slightly lower index of refraction than the core. Its primary function is to ensure total internal reflection within the core and that very little light is lost as it propagates along the core of the optical fibre. The typical combined diameter of core and cladding is 125 μm. The silica core/cladding is protected by an acrylic coating. The total outside diameter of an optical fibre with the acrylic coating is 250 μm. By adopting technologies from telecommunication, many fibre-optic-based sensing techniques have been developed. The fibre optic Bragg grating (FBG) is one of the many available forms of optical fibre sensors. An FBG is made by a periodic variation of fibre core refractive index. The typical length of an FBG is 1–20 mm long. When the FBG is illuminated by a wideband light source, a fraction of the light is reflected back due to interference by the FBG. The wavelength of the reflected light is linearly related to the longitudinal strains of the FBG, thus making FBG an ideal strain gage. The returned signal from every FBG carries a unique wavelength domain, making it possible to have multiple FBG elements on the same fibre. The multiplexing among various sensors on a single fibre can be accomplished by wavelength division addressing. The FBG is partially distributive because only those parts of the optical fibre with FBG are used as strain sensors and these sensors can share the same optical fibre transmission line.
The FBG can be used directly as a strain gage, or, with the help of mechanical components, an FBG can be configured as displacement, pressure or inclination transducers (Ho et al. 2006, 2008). All advantages of the FBG can be inherited in FBG-based transducers for geotechnical engineering monitoring. These advantages can include partially distributive, high resolution; and good signal stability and immunity to electromagnetic interference (EMI), short circuits and lightning. The FBG-based sensors can be used as an individual sensor to reflect a physical quantity at a given location or connected into an array so that the profile of a given or multiple types of physical quantities can be monitored. FBG-based piezometers (Fig. 12), in-place inclinometers (Fig. 13) and automated data logging systems (Fig. 14) (equivalent to ADAS) have been developed and are becoming available commercially.

Regularly spaced fibre optic Bragg grating (FBG) pressure sensors sealed in PVC pipes with filter protection to serve as a string of piezometers. Fibre optic Bragg grating (FBG) pressure sensors. String of FBG piezometers

The fibre optic Bragg grating (FBG) in-place inclinometer

The fibre optic Bragg grating (FBG) data logging system
8 Field Monitoring Using Integrated MEMS Sensor System
A slope failure can have its failure plane located above the ground water table where the soil is unsaturated. This type of slope failure is usually shallow, localized and involves less amounts of debris (shallow slope failure) but occurs much more frequently. Ideally, for shallow slope failure monitoring, we should measure the negative pore pressure in the field. The use of FBG piezometers for negative pore pressure measurements would require frequent maintenance to assure saturation which is rather impractical. The MEMS based sensor stick as shown in Fig. 15 is a low cost sensing system specifically developed for monitoring shallow slope failure. Major control and sensing components include a Microcontroller Unit (MCU), an inertial measurement unit (IMU) and a wireless communication unit as shown in Fig. 16. The IMU contains a gyroscope and a three axis G sensor. The IMU readings reveal tilting and linear motion of the sensor unit. Multiple soil moisture sensors can be placed on the extension pipe (see Fig. 15) at various depths up to 3 m below the ground surface. The moisture readings are converted to negative pore pressure (or matrix suction) via the soil water characteristics curve (SWCC). The system is controlled by the MCU and data are transmitted wirelessly to an aggregator located in the field. The system is compact, low cost and very energy efficient. The MEMS based sensor stick thus compensates well with the FBG sensing system.

The MEMS sensor stick

Components of the MEMS sensor stick
9 Examples of Landslide Monitoring
The following section presents several examples of landslide monitoring, their field set up and available data.
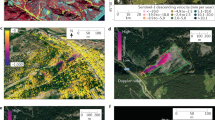
9.1 Highway Slope at Five Turn Point
A section of Highway 18 in Jia-Yi, Taiwan, referred to as the Five Turn Point, has been selected as the most dangerous highway in Southern Taiwan. At least eight sectors (designated as N1–N8 in Fig. 17) have been identified as having either previous slope failure or signs of continuous movement. Figure 18 shows a cross-sectional view of section B-B,, which has an average slope angle of 23°. Subsurface explorations revealed that the subject area was covered by 0–26 m of colluvial material underlain by interlayered fractured sandstone and shale extending from below the colluvium to over 200 m (deepest bore hole available) below the ground surface. The groundwater could rise from its low level by more than 20 m as a result of heavy rainfalls according to available the open-end piezometer data shown in Fig. 18. The sudden and significant change in groundwater table is believed to be a major cause for earlier slope failures in this area.

Topographic map of the five turn point (Land Engineering Consultants, Co., Ltd. 2007)

Section B–B of the Five Turn Point (Land Engineering Consultants, Co., Ltd. 2007)
A 60 m deep borehole (marked as NCTU-03 in Figs. 17 and 18) was used to install the FBG piezometer array. The FBG pressure transducer, used as a piezometer, was fitted inside of a 28 mm (inner diameter) and 32 mm (outer diameter) PVC pipe. A comparison between an array of FBG piezometers installed in a single borehole to individual standpipes is depicted in Fig. 19. All sensors were connected to an on-site computer using optical fiber cables for optical signal interrogation and data logging/transmission. Field installation was completed in September, 2007.

Comparison between the individual standpipe and FBG piezometer array
The Five Turn Point slope endured three major typhoons (i.e., Sinlaku in 2008, Morakot in 2009, and Fanapi in 2010) since September 2008, and remained stable till now (January, 2013). Of the three typhoons, Morakot was the most damaging. A histogram of daily precipitation during typhoon Morakot at Five Turn Point is shown in Fig. 20. Figure 21 shows a set of representative pressure head (hp) profiles based on the FBG piezometer readings recorded from the beginning of typhoon Morakot to the time when the pressure head reached the maximum values.

Rainfall record during typhoon Morakot

Pressure head profiles from FBG piezometer reading (Huang et al. 2012)
9.2 Hua-Fan University Campus Slope
The campus of Hua-Fan University is built on a hill side in New Taipei City, Taiwan. The surface of these steep slopes was mostly covered with colluvial material. Ground movement and the potential for landslides are major concerns for the university. Figure 22 shows the field installation of the FBG in-place inclinometer. The FBG in-place inclinometer readings and their comparison with those of an inclinometer probe are shown in Fig. 23. Both types of readings, albeit taken in different nearby boreholes, showed a shear plane at approximately 20 m below the ground surface.

Field installation of an FBG in-place inclinometer on the Hua-Fan university slope

Comparison between the FBG-IPI and IP readings
10 Techniques Under Development
By sharing data storage and computing with cloud computing, as conceptually described in Fig. 24, the efficiency and reliability of the data logging-communication chain can be much improved. The applications and capabilities of cloud computing in landslide monitoring are expanding rapidly.

Cloud computing based monitoring system (Senslink, Hsichu, Taiwan)
The field monitoring performed in the field usually provides information at a given location. By coupling it with numerical analysis, the information obtained at discrete locations can be extrapolated to cover a cross section of a slope as described in Fig. 25. By coupled data logging and numerical analysis on a real-time basis, an improved warning system for landslides that deals with the whole cross section of a slope can be established.

Coupling real-time field monitoring with numerical analysis
References
Cruden DM (1991) A simple definition of a landslide. Bull Int Assoc Eng Geol 43:27–29
Cruden DM, Varnes DJ (1996) Landslide types and processes. In: Turner AK, Schuster RL (eds) Landslides, investigation and mitigation, TRB special report 247. Transportation Research Board, National Research Council, Washington, DC, pp 36–75
Ho YT, Huang AB, Lee JT (2006) Development of a fiber Bragg grating sensored ground movement monitoring system. J Measur Sci Technol 16:1733–1740
Ho YT, Huang AB, Lee JT (2008) Development of a chirped/differential optical fiber Bragg grating pressure sensor. J Measur Sci Technol 19(4):6
Huang AB, Lee JT, Ho YT, Chiu YF, Cheng SY (2012) Stability monitoring of rainfall induced deep landslides through pore pressure profile measurements. Soils Found 52(4):737–747
Land Engineering Consultants, Co., Ltd. (2007) Highway 28.9 K~31.5 K (Five Turn Point) landslide investigation, remediation planning and safety evaluation, 3rd overall report. Department of Highway Maintenance, Section V (in Chinese)
Mikkelsen PE (1996) Chapter 11, Field instrumentation. In: Turner AK, Schuster RL (eds) Landslides, investigation and mitigation. TRB special report 247. Transportation Research Board, National Research Council, Washington, DC, pp 278–316
Varnes DJ (1978) Slope movement types and processes. In: Landslides: analysis and control. Special report 176. Transportation Research Board, Washington, DC
Wieczorek GF (1996) Landslide triggering mechanisms: investigation and mitigation. Transportation Research Board. Washington, DC
WP/WLI (1990) A suggested method for reporting a landslide. Bull Int Assoc Eng Geol 41
WP/WLI (1993) A suggested method for describing the activity of a landslide. Bull Int Assoc Eng Geol 47
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter

Cite this chapter
Huang, AB., Chang, WJ. (2018). TXT-tool 2.886-1.2: Guidelines for Landslide Monitoring Systems. In: Sassa, K., et al. Landslide Dynamics: ISDR-ICL Landslide Interactive Teaching Tools . Springer, Cham. https://doi.org/10.1007/978-3-319-57774-6_40
Download citation
DOI: https://doi.org/10.1007/978-3-319-57774-6_40
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-57773-9
Online ISBN: 978-3-319-57774-6
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)