
Abstract
One of the limiting factors in our capability to predict the dynamics of structures formed by the assembly of several components has been the difficulty of including suitable models for the joints and interfaces that are an integral part of such structural assemblies. These interfaces often contain surfaces that have a degree of slipping, even if only microslipping, and this influences both the stiffness and the damping properties of the structure. Attempts have been made to include a simple representation of these interface phenomena, encouraged by the empirical observation that often inclusion of an extra stiffness and damping parameter can result in much improved predictions compared with those which assume a perfectly rigid connection at the interface. A common basis for such preliminary models is the presumption that the underlying physics of many interfaces can be represented to a reasonable degree by a cyclic load-deflection curve, referred to throughout this chapter as a “hysteresis characteristic.” In gas turbine applications, hysteresis data are required for different materials, and different material combinations, over a wide range of temperatures, normal loading, amplitudes of slipping regimes, and running time considerations of wear and other time-dependent properties. In all these applications, it was decided to develop rigs on which to measure the hysteresis properties of a nominal contact zone or area that could then be incorporated into a finite element type modeling of specific applications, or joints. This chapter summarizes the developments of hysteresis measurement rigs in four research groups over the past 15 years. These groups are based at Imperial College London, the University of Oxford, Politecnico di Torino, and the University of Cambridge, listed here in chronological sequence of an in-service capability.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


For the past 20 years or so, one of the limiting factors in our capability to predict the dynamics of structures formed by the assembly of several components has been the difficulty of including suitable models for the joints and interfaces that are an integral part of such structural assemblies. These interfaces often contain surfaces that have a degree of slipping, even if only microslipping, and this influences both the stiffness and the damping properties of the structure. Attempts have been made to include a simple representation of these interface phenomena, encouraged by the empirical observation that often inclusion of an extra stiffness and damping parameter can result in much improved predictions compared with those which assume a perfectly rigid connection at the interface.
A common basis for such preliminary models is the presumption that the underlying physics of many interfaces can be represented to a reasonable degree by a cyclic load-deflection curve such as that shown in Fig. 12.1a—referred to throughout this chapter as a “hysteresis characteristic”—and often simplified into two main parameters as shown in Fig. 12.1b. Theoretical and numerical models of a structure which include elements with such load-deflection characteristics have resulted in useful approximations to an otherwise intractable restriction on our structural dynamic modeling. The key to the effectiveness of this type of model depends on the possibility of providing reliable quantitative data for the main features of the characteristics for different interface details, or materials, surface finish, normal loads, model of assumed friction behavior (e.g., Coulomb), and other parameters that will vary from case to case—see Fig. 12.1c. Models based on this presumed interface physics have been developed by various groups and all have needed to generate their own quantitative data.

Summary of the main features of rigs included in this review: (a) typical hysteresis characteristic, (b) simplified model for analysis, and (c) sample of measured data
This approach has led to the need for test rigs to measure the basic sticking/slipping hysteresis characteristic under a wide range of conditions that might be encountered in the service use of the structures in question. In turn, a review—and even a survey of outputs from like-intentioned rigs—was first proposed by the ASME Research Committee on the Mechanics of Jointed Structures in the 2009 Dartington Workshop (Segalman et al. 2010). This brief chapter fulfils that task by summarizing the developments in four research groups over the past 15 years. These groups are based at Imperial College London, the University of Oxford, Politecnico di Torino, and the University of Cambridge—listed here in chronological sequence of an in-service capability. Other research groups are known to have similar capabilities but did not contribute to this survey.
1 Original Motivation and Demands for Interface Hysteresis Data
Some of the earliest developments of this type of modeling came from the gas turbine industry, and three of the four groups—London, Oxford, and Torino—were all working in this industry. The launch topic for both London and Torino was the need in the 1990s to be able to analyze the complex behavior of the underplatform dampers that are found in most of today’s aircraft gas turbines (see Chap. 13). A parallel but different track was pursued at Oxford, also in the late 1990s, in efforts to understand and control the edge-of-bedding fatigue cracking encountered in the blade-disc dovetail roots in large fan blades. In both of these specific cases, the growing use of numerical models to predict the dynamic behavior of many components encountering such hysteresis-like behavior demanded reliable and comprehensive quantitative data for the key features that represent these characteristics. Other industries, such as defense and automotive, have had similar issues to address but have only more recently followed this same approach. The Cambridge rig is a result of extensive research on brake squeal but is also directed towards other applications, including musical instruments.
In the gas turbine applications, hysteresis data are required for different materials, and different material combinations, over a wide range of temperatures, normal loading, amplitudes of slipping regimes, and—increasingly, nowadays—running time considerations of wear and other time-dependent properties. In all these applications, it was decided to develop rigs on which to measure the hysteresis properties of a nominal contact zone or area that could then be incorporated into a finite element type modeling of specific applications, or joints.
2 Summary of Reference Set of Test Rigs
2.1 Overview
In this section, the main features of the rigs in the four research groups listed above are summarized. More detailed descriptions of each of the test rigs are provided at the end of this chapter, authored by the developers and users themselves. References are included for further investigation of the different techniques.
All four groups have test rigs that are designed to measure the hysteresis characteristics illustrated in Fig. 12.1, with a view to extracting quantitative data for use in an analytical modeling to predict the behavior of structures containing such features. In each case, the working contact zone must be carefully defined and prepared, with the following specification: nominal area of contact (for flat-on-flat; hemispherical-on-flat is theoretically zero), normal load across the contact area, surface finish of contact area, range of amplitudes of slippage, and frequencies of cyclic loading.
A summary of the main features of the different rigs is given in Tables 12.1 and 12.2. Note that both Imperial and Torino have two generations of rigs, the second one being a refinement of the first, with much the same objectives and many similar features as its predecessor.
2.2 Imperial College London Rigs
The rigs developed at Imperial College London represent two generations of the same essential configuration, the one currently in use (second-generation) being a more refined and more reliable instrument. Both rigs use flat-on-flat contact zones for the tests.
2.2.1 Imperial College London: First-Generation Rig, Commissioned in 1998
The test piece that is measured in each test comprises a pair of cylindrical specimens each of which has at the test end of the sample a beveled flat surface, 1 mm wide, normal to the axis of the cylinder, as can be seen in Fig. 12.2. The two mating surfaces that comprise the “test piece” are oriented about the cylinder axis so as to be perpendicular to each other, thus presenting a 1 mm × 1 mm contact zone, which is the subject of the measurement. It should be noted that the two parts of the test piece can be made from different materials, if so desired.

Imperial College London—first-generation rig: whole assembly, test piece, and typical output
Measurements are made of the normal load, the relative slipping displacement of one surface on the other, and the forces required to bring this motion about. Measurements can be made at a wide range of loading, frequency, and temperature as described in more detail in Sect. 12.3. Experience from the very beginning indicated that for each measurement it was desirable to conduct a running-in period of several tens of thousands of cycles so that the two surfaces would settle into a well-conformed pair before detailed measurement is made of the load-displacement (hysteresis) characteristic, which is the objective of the procedure. The main features of the rig can be seen in Fig. 12.2, which includes a typical hysteresis measurement on an industrial sample. Special features of the rig include a significant effort made to ensure that measurement of the relative motion of one surface slipping against the other truly represents that quantity and is not contaminated by the local elasticity of the holding clamps, or the frame of the rig itself.
2.2.2 Imperial College London: Second-Generation Rig, Commissioned in 2012
After more than a decade of service by the first-generation rig, a second-generation rig was developed for both research and “production” service. This embodies enhancements and other uprating of the original design but was especially tuned for efficient production usage: testing and measuring samples for industrial use in a rapid cost-effective and reliable way. It shares the same test piece and contact zone features of the first-generation rig but has wider ranges of applicability on temperature, frequency, and sliding amplitude. It also includes improved and more accurate measurement capability with more modern transducers and a more sophisticated rig architecture.
This rig is described in greater detail in Sect. 12.3. Figure 12.3 shows the overview and test piece detail and a typical result in the same format as Fig. 12.2 displays the first-generation rig.

Imperial College London—second-generation rig: whole assembly and typical output
2.3 University of Oxford Rigs
A primary test rig for measuring the dynamic hysteresis characteristics of similar materials to those of interest to the London group was developed at Oxford starting in the late 1990s to support studies of fretting issues in the dovetail roots of aeroengine fan blades. The rig was designed to be installed in a hydraulic testing machine that could apply the necessary tangential forces to generate slipping of the test surfaces. The rig measures two nominally-identical test specimens simultaneously, these bearing on opposite sides of the central bar, which is driven by the actuators (see Fig. 12.4). The test specimens are essentially flat-on-flat, with a nominal contact area of between 25 and 100 mm2 but have rounded edges, similar to those in the actual engine components. Two methods of measurement are used for the critical relative displacement parameter across the interface, one using a linear variable differential transformer (LVDT) and the other, more precise, optical with digital image correlation (DIC) analysis to minimize the risk of rig flexibility affecting the results.

Oxford—rig 1 linear: whole assembly, test piece, and typical output
A typical result from this rig is shown in Fig. 12.4 and displays a feature that can affect many hysteresis measurements made in this way (and, indeed, in the other rigs included here). This is the rise in the force as the tangential displacement approaches the end of its sliding phase (top right-hand and bottom left-hand corners of the measured hysteresis loop). This is often due to an end-of-scan effect, which can build up as more cycles of measurement are made—a ridge forming at this point and eventually deterring the final section of the scan. To overcome this phenomenon, a second rig was designed and built based on torsional oscillation rather than linear. This second rig is shown in Fig. 12.5, and its essential feature is clearly displayed in the photograph and sketches of the two parts of the test piece—one has a complete annulus for contact while the other has three partial sectors. A direct comparison of measurements made of the same material (but different test pieces) is also shown in Fig. 12.5. Further details of both rigs are given in Sect. 12.4.

Oxford—rig 2 torsional: diagram, test piece, and typical output
2.4 Politecnico di Torino Rigs
2.4.1 First-Generation Torino Rig
Studies of friction-related dynamics in aeroengine gas turbines and other high-performance machinery are a major activity at the Politecnico in Torino (see Chap. 13). Test rigs of similar concept to those at Imperial College London have been developed independently, and have different features, but both seek the same information for the same applications. The first-generation test rig, shown in Fig. 12.6, was first commissioned in 2002 to measure the hysteresis characteristics previously defined and was extended in 2007 to include measurements of fretting wear. This rig uses an electromagnetic shaker to drive the slipping interfaces, and laser Doppler vibrometers (LDVs) to measure the cross-interface displacements. The primary test piece contact zone for measurement is flat-on-hemispherical, unlike the London and Oxford rigs, and as a result has a “point” contact so that the dimensions cannot be compared directly with the flat-on-flat type of test piece. The rig also has a high-temperature capability for the critical applications to turbine blade devices. Typical results are shown in Fig. 12.6 and further details are given in Sect. 12.5.

Politecnico di Torino—first-generation rig: whole assembly and typical output
2.4.2 Second-Generation Torino Rig
With the benefit of many years’ experience with the first-generation test rig, an improved second-generation rig was designed and built in 2010. The main difference between these two rigs was the adoption of flat-on-flat contact interfaces in the later one. Specially-designed test pieces based on a “free support” approach for the contacting surfaces are shown in Fig. 12.7 and discussed in detail in Sect. 12.5. Other enhancements were also made, including a widening of the working frequency range.

Politecnico di Torino—second-generation rig: whole assembly, test piece, and typical output
2.5 University of Cambridge Rig
The most recent test rig in this group has been developed for a wide range of applications with the particular feature that the dynamic vibratory motion that exhibits the hysteresis characteristics is superimposed on a steady continuous sliding motion. Primary application areas are to brakes in the automotive and other transport sectors, stringed instruments in the music world, and earthquake modeling in geophysics. This is an environment that is one stage more complex than those addressed by all the other rigs and has particular import when seeking to identify (or suppress or induce) instability in the host structures.
This rig shown in Fig. 12.8 is derived from the pin-on-disc rigs used in brake dynamics and embodies a complex package of sensors with a piezo actuator used to induce the oscillatory slipping. The rig is used to extract additional information to the standard hysteresis characteristics that are the objective of the other rigs, but it includes this same format in its capabilities, as shown in Fig. 12.8 and described in more detail in Sect. 12.6.

Cambridge rig: whole assembly and typical output
2.6 Comments on the Rigs
There are seven different rigs reported here, based in the four research groups. All are used primarily to measure the hysteresis characteristic, which can be interrogated to deduce both stiffness and damping features that affect the structures that contain these interfaces as essential components in their assemblies. A number of features are observed on numerous occasions: principally (a) a positive slope on the forward and reverse zones of macroslipping, which is not expected in a Coulomb-type friction behavior and (b) a protuberance at the end of the macroslip zone. The latter effect is often traceable to a ridge being formed at each end of a multi-cycle test run, and this can be addressed by using a torsional test rig, or by removing the sharp edges at the ends of the test pieces. The positive slope in some plots is less easily dismissed and raises questions of the possible intervention of a nonrigid test rig or other phenomena, not yet fully understood.
One of the major concerns in all cases is to ensure a reliable measurement of the relative displacement across the slipping contact zone, as this is used to derive the tangential contact stiffness. Any offset of measurement point from the actual surface will reduce the apparent stiffness estimate. Most rigs exercise considerable care in this aspect.
With the experience of many years’ measurement, it is clear that the hysteresis properties are strongly slipping time-dependent, and this is associated with wear of the contact zones themselves. It is also clear that this factor needs to be included in the measured data because the changes of these parameters with running time on the rig are not negligible. At least two of the rigs include measurement of the wear itself and this is an additional parameter to be included with the stiffness and friction coefficients. Most of the test pieces used now are of the flat-on-flat configuration with a specific nominal contact area. Of course, the actual contact area will be much more complex than just load divided by nominal area, but that is outside the scope of these test rigs.
It will be interesting to undertake comparisons of the data measured on these various rigs using identical materials, and if such a comparison is ever made, it will need to take care to ensure that comparisons are reliable. The one known effort of this type was an attempt to compare results from the Imperial and Oxford rigs testing samples cut from the same billet of material. Because of the different test parameters, direct comparison was not immediate and although there were indications of a measure of agreement, this was not conclusive.
3 Two Generations of Dynamic Friction Test Rigs at Imperial College London
David J. Ewins and Christoph W. Schwingshackl
Imperial College London, London, UK
3.1 Background
It has been accepted at Imperial College London for more than 20 years that an accurate measurement of the friction input parameters is an essential ingredient for a reliable nonlinear dynamic analysis of assembled structures. The dynamic friction contact properties must therefore be measured under a wide range of contact conditions, and especially under operational velocities to ensure reliable results. Either a real joint (e.g. bolted flange) can be used to extract the dynamic friction properties or the friction interface geometry can be simplified as much as possible to focus directly on the material characteristic, as opposed to the structure.
3.2 First-Generation Rig
The first attempts at applying this latter approach at Imperial College London started in the mid 1990s resulting in the first-generation rig reported here. It was decided at the outset to base the rig on a configuration where two flat surfaces would be pressed together with a static normal load and then rubbed together in an oscillatory trajectory along the common plane. A contact area or “zone” of ≈ 1 mm2 was chosen on the basis that this would represent what might be a typical finite element in a mathematical model constructed for dynamic analysis of a typical gas turbine structure with such an interface included. Considerable attention was given to the detailed design and configuration of the test pieces. Each measurement uses a pair of test pieces, which can be of the same material or different materials, as appropriate. Each test piece is cylindrical, of approximately 10 mm diameter. The test surface is obtained by double beveling one end to produce a test surface of 1 mm width and approximately 10 mm length, as shown in Fig. 12.9. The two interfacing surfaces are both flat in the Imperial rigs so that the zone is classified as flat-on-flat, and the normal loading is expressed as a normal stress, with the actual load divided by the nominal area, in this case 1 mm2. Each of the two halves of the test piece is held in a separate solid block that is used to load them together with a static normal load and then to move them independently of each other in the tangential direction with a shaker in such a way that at the interface there is a steady oscillatory sliding of the two contact zone surfaces on each other, in their own plane. It should be noted that the two test pieces are orientated such that when they are in contact, they form a cross (i.e. they are oriented at 90∘ to each other). It should also be noted that the direction of sliding can be aligned to one or other of the two test pieces, or at any other arbitrary angle such that the actual area of each test piece involved in the measurements is up to 1.4 mm2.

Imperial College London first-generation rig
The complete test rig is shown in Fig. 12.10. The main features are: the use of a single scanning laser Doppler vibrometer (SLDV) to measure the relative displacement across the contact surface of the test pieces; deadweights to provide the normal loading across the interface; a mass-spring subsystem aligned with the shaker to ensure maximum control to maintain constant-level oscillatory displacement at the optimum test frequency and a small electrical heating device that can be mounted just around measurement contact zone giving temperatures up to 1000 ∘C.

Imperial College London first-generation rig—details of components
3.3 Second-Generation Rig
The second-generation friction test rig (Schwingshackl 2012) of the Dynamics laboratory at Imperial College London belongs to the same simplified interface type using a flat-on-flat contact interface with a nominal area of 1 mm2, as used in the earlier rig. Its main purpose is the measurement of the friction coefficient, μ, and the tangential contact stiffness, k t , for a large range of gas turbine materials (Schwingshackl et al. 2012), leading to a challenging set of requirements for the rig. To provide realistic friction behavior for the analysis, frequencies up to 200 Hz can be excited. A maximum contact pressure of 500 MPa at the nominal contact area of 1 mm2 can be generated to investigate the impact of higher loads and/or larger contact areas, especially on the contact stiffness. Relative contact displacement amplitudes up to 100 µm can be reached to simulate a full hysteresis loop from stuck conditions to microslip and macroslip. A furnace provides temperatures up to 1000 ∘C for the testing of high-temperature materials.
The main concept of the test rig shown in Fig. 12.11 is a unidirectional motion of a moving mass and specimen, excited by an electrodynamic shaker, against a static specimen. The specimens in Fig. 12.12a consist of two cylindrical rods of variable material, with a flat top that leads to a square contact area once they are mounted with a 90∘ rotation in the rig. The normal load at the contact interface is provided by a pneumatic actuator—an improvement from the first-generation rig—that provides loads from 10 to 500 N during testing, which can easily be adjusted during a test regime. A contactless simultaneous measurement of the relative displacement between the two test specimens is achieved by two LDVs. The absolute distance between the two measurement points is thereby kept to a minimum ( < 1 mm) to minimize the impact of rig compliance (see Fig. 12.12b). The transmitted friction forces are measured via three force transducers at the static side of the rig. A combination of the friction forces and the relative displacement for a given test configuration leads to the hysteresis loop in Fig. 12.12c with stuck, micro-, and macroslip regions. Basic curve-fitting tools are employed to extract the friction coefficient, μ, from the distance between the two macroslip lines and the known normal load, N 0, and the tangential contact stiffness, k t , from the fully stuck section right after the turning point.

Imperial College London second-generation dynamic friction test rig

The second-generation friction rig: (a) test specimen, (b) displacement measurement locations, and (c) typical hysteresis loop
A micro furnace can be fitted to the rig, allowing the testing of high-temperature materials for turbine applications, up to 800 ∘C. The test rig allows an accurate extraction of the friction input parameters and has provided data for a large range of materials and operational conditions in a very short amount of time that can be used in a nonlinear dynamic analysis for a reliable prediction (Schwingshackl et al. 2013).
3.4 Results
Both generations of the Imperial College London friction rigs have been used to study a wide range of material combinations at different temperatures and loads. Figure 12.13 taken from Schwingshackl et al. (2012) summarizes some of these findings, obtained from the first-generation rig, indicating a sharp drop in the friction coefficient from room temperature to 200 ∘C, after which a more or less stableμ = 0. 2–0. 4 is reached, independent of the material combination. It can be also seen that no significant pressure dependence of the friction coefficient can be observed (see Fig. 12.13b).

Imperial College London first-generation friction rig: friction coefficient over (a) temperature and (b) pressure for different materials (Schwingshackl et al. 2012)
4 Friction Testing at the University of Oxford
David Nowell and David A. Hills
University of Oxford, Oxford, UK
4.1 Background
A range of investigations of frictional behavior have been carried out at Oxford over the past decade. The original requirement arose as part of an investigation into the fatigue performance of aeroengine blade-disc joints, and the test geometry was therefore chosen to be reasonably representative of such a contact, both in size and in the pressure distribution. The basic geometry of the test is shown in Fig. 12.14a. Two contact pads are clamped against a flat specimen with a normal force P, applied with a hydraulic cylinder. The magnitude of P is calculated from the hydraulic pressure and the area of the hydraulic pistons. The pads have a “flat and rounded” geometry, which gives a good approximation to the pressure distribution in a typical blade-disc joint. The flat section of each pad is square or rectangular in plan form with a typical dimension of 5–10 mm. Transition radii of a similar magnitude are present at each end of the contact. Figure 12.14b shows a photograph of a specimen and a pair of pads.

(a) Geometry of friction test right, and (b) photograph of specimen and pads
The pads are mounted in cylindrical pad holders, which are a close sliding fit in a stationary cast iron block. This allows relative motion of the pads normal to the specimen surface to accommodate wear but restricts motion in the “tangential” direction. Relative motion between the pads and the specimen is achieved by mounting the fixture in a servo-hydraulic testing machine and applying a cyclic displacement to the threaded end of the specimen in displacement control. A load cell on the machine measures the total tangential force applied, Q. Since conditions are nominally identical on each contact, this force is assumed to be divided equally between the two contacts. Two different methods are employed to measure relative displacement. An indication of overall displacement can be achieved by inserting an LVDT between the pads and the specimen grips. However, the reference points for this relative displacement are somewhat remote from the contact itself and additional compliance is introduced. This has no particular significance if frictional force is all that is required. However, for accurate displacement measurement (e.g., to determine normal or tangential contact stiffness), a “Questar” long-range microscope is used to image a small region (approx. 1.0 mm2) close to the center of the contact. These images are then used in a commercial DIC software package to provide information on relative displacement local to the contact. This technique may also be applied to measure normal and tangential contact stiffness (Kartal et al. 2011b). The rig is described more fully in Kartal et al. (2011a).
4.2 Results
Figure 12.15 shows typical results obtained for a metal-on-metal contact in the form of hysteresis loops relating tangential force to measured relative displacement (in this case measured with an LVDT). Two different loops are shown for different applied displacement amplitudes. It can be seen that stick occurs at each end of the cycle. During these stick periods, a change of displacement is recorded because of the compliance between the contact and the points where the displacement is measured. Regions of forward and reverse sliding are also readily distinguishable. The friction coefficient can be evaluated by dividing the sliding value of the tangential force, Q s , by the normal force, P. Figure 12.16 shows a typical variation of friction coefficient with the number of cycles of reciprocating displacement applied (in this case for contact of Ti6/4 against Ti6/4). It is seen that there is a rapid rise in friction coefficient from about 0.3 to about 0.6 as the contact beds in over the first 1000 cycles or so. This is followed by a more gradual rise of the remaining cycles of the test, with a final value of about 0.65 being reached. This behavior is typical of metal-on-metal contact. For low-friction coated systems, there is frequently an initial fall in friction coefficient, followed by a long period where it is constant. Finally, the friction coefficient will start to rise as the coating wears through, and recorded values will approach those for bare metal.

Variation of tangential force at contacts with relative displacement

Variation of friction coefficient with relative number of cycles of sliding
4.3 Torsional Rig
In Fig. 12.15, it is seen that there is a rise in sliding tangential force towards the end of each sliding cycle. This feature is not present initially but develops over the course of the measurement. It is thought to be associated with wear at the contact interface and development of self-registration of the surfaces (Mulvihill et al. 2011). However, the effect might be principally a macroscopic effect at each end of the wear scar, or the sum of microscopic asperity contact effects. In order to investigate this, a torsional apparatus was devised (Mulvihill et al. 2011). The basic configuration was that of an annular or “ring” specimen, which could be oscillated rotationally against flat counterbodies or “pads.” In this configuration, there are no “ends” to the contact, and only microscopic effects should be present. If a segmented ring is used, however, each segment will have two ends, and the overall result will be a combination of micro- and macroscopic effects. Figure 12.17a shows a diagram of the apparatus, and Fig. 12.17b shows photographs of the specimens and pads.

(a) Diagram of the torsional apparatus looking along the specimen axis, and (b) torsional pads and specimen
Figure 12.18 shows a typical result obtained with the torsional apparatus for both segmented and continuous ring specimens. It is seen that in this case the increase in friction during sliding is more gradual, taking place over the second half of the sliding phase. There is no significant difference between the behavior of segmented and non-segmented rings, suggesting that the effect is more likely to be caused by rough contact interaction than by macroscopic wear scars. This conclusion is further investigated in Mulvihill et al. (2011) by examining the development of registration (i.e., cross-correlation) between the two surfaces.

Frictional torque against angular displacement for metal-on-metal contact with torsional apparatus
4.4 Conclusions
Investigations of the behavior of frictional interfaces have been carried out at the University of Oxford in reciprocating sliding. Typical contact dimensions have been in the region of 5–10 mm, sliding amplitudes less than 1 mm, and mean contact pressures between 20 and 200 MPa. Linear and torsional rigs have been used, and there is an element of rig-dependence in the results. Both coated and uncoated specimens have been tested. In general, the friction coefficient is found to vary with time. In reciprocating sliding, the apparent friction coefficient can increase in the later part of each stroke. This is thought to be due to the development of registration between the surfaces as wear starts to become significant at the asperity scale.
5 Measurement of Friction Contact Properties at Politecnico di Torino
Daniele Botto, Sergio Filippi, Muzio Gola, and Mario Lavella
Politecnico di Torino, Torino, Italy
5.1 Background
The AER-MEC laboratory of Politecnico di Torino has developed, over the years, a series of test rigs aimed at recording the hysteresis cycles of rubbing surfaces for contact parameter estimation. Two of these test rigs focus on friction and microwear characterization of sphere-on-flat (Sect. 12.5.2) and double flat-on-flat (Sect. 12.5.3) contacts. The test rigs allow for the exploration of a wide range of experimental conditions in terms of temperature, frequency, and contact pressure at the contact. The combined use of associated test rigs for underplatform dampers links the classical tribological characterization of contacts to contact parameter estimation of turbomachinery components during operation.
5.2 Friction and Wear Test Rig for Sphere-on-Flat Contacts
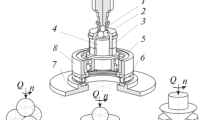
The test rig for point contact characterization and wear test designed at the Politecnico di Torino, AER-MEC Laboratory—Department of Mechanical and Aerospace Engineering, in its last configuration is described in Filippi et al. (2004). This rig was first developed in 2000 in collaboration with Carnegie Mellon University in the USA, as reported in Lavella and Botto (2011), and has been in regular service since 2002. Initially, it was developed only for hysteresis loop measurement but in 2007 it was improved in order to perform fretting tests with relative displacement control. The test rig works at high temperatures of up to 1000 ∘C, by means of induction heating. Figure 12.19 includes a general scheme and a detailed assembly of specimens while the test rig is illustrated by photographs in Fig. 12.20.

Politecnico’s first-generation test rig scheme with detail of specimen assembly

(a) General view of the test rig, (b) detail of samples assembling in work condition, and (c) picture of samples
The two specimens rub against each other with a displacement of low amplitude (typically, from 1 to 250 µm) under the action of a constant normal load. The sample support of the flat specimen was fixed on an oscillating beam that was set in motion by a shaker. The shaker input voltage is controlled by a computer card using the relative displacement of the two specimens as feedback. The measurement of the relative displacements is taken as close as possible to the actual contact point using two LDVs (Fig. 12.19). The same card performs the control algorithm for both relative displacement and contact temperature. This temperature is controlled on the basis of thermocouple measurements located near the contact point (Fig. 12.19). Feedback control automatically keeps the contact temperature constant at the set-point value throughout the whole test. The temperature adjustment is made by switching the induction machine on and off within a duty cycle of 1 s. The sample support of the spherical specimen is fixed and constrained by two piezo-force transducer sensors in order to measure the tangential contact force. The hysteresis loops are visualized and elaborated in order to evaluate the loop area and stored during the test. The loop developed during the test is used in order to measure the energy dissipated during the test while the contact parameters (friction coefficient and tangential contact stiffness) are obtained by postprocessing the developed loops.
5.3 Friction and Wear Test Rig for Double Flat-on-Flat Contacts
The test rig for flat-on-flat contact characterization and wear test designed at Politecnico di Torino, in its last configuration, is described in Lavella et al. (2013). This rig has been in service since 2010. The main feature of this rig is the free approach (Fig. 12.21, in contrast to a rigid approach, such as in Fig. 12.22) of the contact surfaces. In other words, the approach of two interfaces is floating without constraint. Consequently, the evolution of the mating surfaces is not affected by factors other than the normal load. Moreover, the normal load acts without influencing the contact pressure distribution. These characteristics are in contrast to the rigid approach where the contact is initially a point contact that becomes a flat-on-flat contact only after wear occurs.

Free approach of the contact surfaces

Rigid approach of the contact surfaces
Figure 12.23 shows a picture of the rig. One of the specimens is attached to the rig frame, basically an inertial mass and four springs, and subsequently excited by an electromagnetic shaker. The second specimen is allowed to approach the first specimen and to rotate in such a way that the geometric contact between the two surfaces occurs at three points. In this way a real ‘flat-on-flat’ contact is obtained. The two surfaces are kept in contact by means of a constant normal load. The tangential contact force is measured by a force sensor while the relative displacements between the contact surfaces are measured by two LDVs. The relative displacement is kept under control by acting on the shaker force. Tangential force and relative displacement are used to describe the hysteresis loop and, consequently, to obtain the friction coefficient and contact stiffness during the wear process. The test rig works at high temperatures of up to 1000 ∘C, by means of induction heating. The temperature is feedback-controlled using two thermocouples placed on the specimens near the contact surfaces. The main results are the characterization of the contact parameters and the wear behavior of real flat-on-flat contact surfaces, and the possibility of easily measuring the wear volume history of the same pair of specimens with a negligible perturbation to the wear processes from volume measurements. In other words, it is possible to stop the wear process, disassemble the samples, make the surface measurements, reassemble the rig, and restart the wear process on the same groove with a minimal perturbation.

General view of the test rig for flat-on-flat contact
6 New Measurements on Dry Friction at the University of Cambridge
Jim Woodhouse, Alessandro Cabboi, and Andrew McKay
University of Cambridge, Cambridge, UK
6.1 Background
A new tribological measurement rig has been developed that is used to provide new information about dry friction at a sliding contact. The design of the rig came out of studies of brake squeal and related phenomena, where a key need is to predict the linear stability/instability threshold of a system that initially shows steady sliding. For that purpose, the required frictional measurement is something not previously attempted. A test machine of the pin-on-disc type is used to provide the underlying steady sliding, then a piezo actuator is used to superimpose a small, controllable fluctuation in sliding speed. A package of sensors allows force and velocity to be measured close to the contact region, in both the frictional and the normal directions. The actuator is driven with band-limited random noise, and standard methods of vibration measurement are used to construct a linearized frequency response function: perturbation in friction force divided by perturbation in sliding speed as a function of frequency. Further details of the background to this rig can be found in Woodhouse et al. (2015) and Cabboi et al. (2016).
The rig currently gives good data in the range 100–2000 Hz. Measurements so far are mainly proofs of concept: the particular materials tested are not yet motivated by engineering applications, but in principle the rig can be used to test any material combination. Typical results for nylon against glass are shown in Fig. 12.24. The response is indeed found to be complex (i.e., showing a phase lag) and to vary with frequency. The shape of the response curve varies with the mean sliding speed and with the normal load.

Response functions measurements of nylon-on-glass interface. Left: frequency response, right: phase response in the complex plane
It has been found that a dynamic model of the rate-and-state type can fit the results well, provided that the standard model is augmented to allow for contact stiffness. The right-hand figure above is a Nyquist plot of the same data, with superimposed predictions from such a model.
The same test rig can be used to perform other dynamic friction tests, using the same contact conditions, sensors, and instrumentation. This should very soon allow for experiments to probe whether the model fitted to the high-frequency linearized tests has predictive power in other contexts. This will allow the results to be related to other work which uses different types of testing.
6.2 Speed-Jump Test
In the geophysics world of earthquake modeling, where the rate-and-state models originated, the most common test is to impose a sudden jump in sliding speed without reversing direction. This reveals a transient event, which was the motivation for needing an internal state variable in the friction law to capture this relaxation transient. An example of a speed-jump response from the Cambridge rig is shown in Fig. 12.25.

Response from speed-jump excitation on test rig
6.3 Reciprocating Sliding Test
By imposing sinusoidal motion of the disc, with no mean rotation, conditions similar to those used in friction-damper testing can be achieved. Here is an example for polycarbonate against glass, plotted in a style familiar from the friction-damper world, as shown in Fig. 12.26.

Hysteresis characteristic of polycarbonate-on-glass interface (no steady sliding)
There are two versions of measured force here: (i) from strain gauges (with good DC response but high noise level), and (ii) from piezo sensors (with cleaner signal but requiring compensation to give low-frequency data). Also superimposed is a preliminary prediction from the fitted model, showing encouraging agreement (at least qualitatively).
6.4 Stick-Slip Self-oscillation Tests
It is planned to use the same rig with a non-driven oscillator in contact with the disc, to explore the initiation and waveform details of self-excited stick-slip motion. This will allow direct testing of whether the fitted friction model has good predictive power for squeal-type instabilities and will also allow exploration of whether such tests can be analyzed in an inverse manner to give additional information about the frictional constitutive model. An image of the rig is shown in Fig. 12.27, and a schematic is given in Fig. 12.28.

Test rig with rotating disc and sensor and actuator pack

Sensor head, containing two strain gauges, two piezo force sensors, and a three-axis MEMS sensor giving motion of the small block holding the hemispherical specimen of the material under test. Typical contact footprint is a circle of diameter around 1 mm
References
A. Cabboi, T. Putelat, J. Woodhouse, The frequency response of dynamic friction: enhanced rate-and-state models. J. Mech. Phys. Solids 92, 210–236 (2016)
S. Filippi, A. Akay, M.M. Gola, Measurement of tangential contact hysteresis during microslip. ASME J. Tribol. 126, 482–489 (2004)
M.E. Kartal et al., Determination of the frictional properties of titanium and nickel alloys using the digital image correlation method. Exp. Mech. 51, 359–371 (2011a)
M.E. Kartal et al., Measurements of pressure and area dependent tangential contact stiffness between rough surfaces using digital image correlation. Tribol. Int. 44, 1188–1198 (2011b)
M. Lavella, D. Botto, Fretting wear characterization by point contact of nickel superalloy interfaces. Wear 271, 1543–1551 (2011)
M. Lavella, D. Botto, M.M. Gola, Design of a high-precision, flat-on- flat fretting test apparatus with high temperature capability. Wear 302, 1073–1081 (2013)
D.M. Mulvihill et al., Investigation of non-Coulomb friction behaviour in reciprocating sliding. Wear 271, 802–816 (2011)
C.W. Schwingshackl, Measurement of friction contact parameters for nonlinear dynamic analysis, in 30th International Modal Analysis Conference (IMAC XXX), Jacksonville, FL, 2012
C.W. Schwingshackl, E.P. Petrov, D.J. Ewins, Measured and estimated friction interface parameters in a nonlinear dynamic analysis. Mech. Syst. Signal Process. 28, 574–584 (2012)
C.W. Schwingshackl et al., Modeling and validation of the nonlinear dynamic behavior of bolted flange joints. ASME J. Eng. Gas Turbines Power 135, 122504-1–8 (2013)
D.J. Segalman, L.A. Bergman, D.J. Ewins, Report on the SNL/AWE/NSF international workshop on joint mechanics, Dartington, 27–29 April 2009. Technical Report SAND2010-5458, Sandia National Laboratories, Albuquerque, NM (2010)
J. Woodhouse, T. Putelat, A. McKay, Are there reliable constitutive laws for dynamic friction? Philos. Trans. R. Soc. Lond. Ser. A 373, 1073–1081 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter
Cite this chapter
Ewins, D.J. (2018). A Survey of Contact Hysteresis Measurement Techniques. In: Brake, M. (eds) The Mechanics of Jointed Structures. Springer, Cham. https://doi.org/10.1007/978-3-319-56818-8_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-56818-8_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-56816-4
Online ISBN: 978-3-319-56818-8
eBook Packages: EngineeringEngineering (R0)