
Abstract
In the current chapter we focus on the development of numerical methods to reduce the computational effort of finite element (FE)-based wave propagation analysis and to enable the modelling of heterogeneous cellular structures. To this end, we take two different approaches: (1) implementation of damping boundary conditions to reduce the solution domain, and (2) development of methodologies to approximately capture the heterogeneities of cellular sandwich materials. The main advantage of our approach is seen in the fact that it can be implemented in commercial FE software in a straightforward fashion. Using these approaches we can study the interaction of guided waves with heterogeneous and cellular microstructures with a significantly reduced numerical effort. By means of parametric studies we then extract important variables that influence the behavior of elastic waves in sandwich panels.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

1 Objective
The content of this chapter is primarily based on Dr. Hosseini’s research. The results of his investigations are published in a PhD thesis [10] and in several peer-reviewed journal articles [11–14, 35].
In high-tech industries such as aeronautics the interest in lightweight design is steadily increasing and therefore typical lightweight materials, such as cellular sandwich panels or fiber/particle-reinforced plastics, are in the focus of recent research activities. Moreover, due to their mechanical and physical properties, a wide range of potential applications in different industries can be thought of for these structures [9]. The wave propagation analysis in these heterogeneous structures is quite complicated [22, 27] still guided waves have been used in nondestructive testing (NDT) for the last two decades [24]. Among lightweight materials cellular structures are of special interest. At the beginning of the 1970s the idea of lightweight cellular and porous structures was born as scientists tried to mimic natural structures such as the human bone structure [5, 7]. In general, cellular structures are defined as materials exhibiting a high porosity. Here, the volume is divided by solid walls into separate cells with internal air cavities. Consequently, cellular structures have densities that are typically below 10% of the density of the base material. In this context, the relative volume V rel is used to quantify the “porosity.” In contrast to cellular structures, a porous material contains a multitude of microscopic pores and therefore, the density is similar to that of the base material [9]. Often cellular materials are distinguished in four classes having different core layers :
-
1.
Foam core layers,
-
2.
Honeycomb core layers,
-
3.
Sphere core layers,
-
4.
Lattice block core layers.
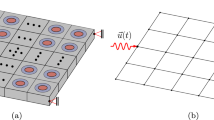
A selection of these different core layers is illustrated in Fig. 8.1. The properties of such lightweight materials are comprehensively discussed in [10].

Sandwich panels with cellular core layers : (a) open cell foam, (b) a closed-cell foam, (c) a sphere, (d) a hollow sphere, and (e) a honeycomb core layer
Due to the wide range of possible properties of cellular materials numerous applications in the aeronautical and aerospace industry are reported [16, 39]. Considering industrial applications cellular structures are often manufactured in the form of sandwich panels where the core material is enclosed by at least two thin face sheets [10]. Choosing the optimal core layer for the intended application is, however, a very demanding task.
Since experimental testing is not always possible we need to develop reliable computational tools to predict the behavior of elastic waves in complex structures. However, the simulation of ultrasonic guided waves in thin-walled structures is a computationally very demanding task especially when considering modern lightweight materials. Therefore, we need to reduce the numerical effort significantly to obtain solutions in a timely manner.
The current state of the art regarding wave propagation in cellular structures is addressed in several publications [15, 20, 23, 25, 28, 30, 32, 34, 36, 38]. These studies show the steadily growing research activities in the field of structural health monitoring (SHM) and highlight the need for computationally efficient numerical tools to gain a deeper understanding of the underlying physics of guided wave propagation in heterogeneous materials. In the current chapter, we apply the h-version of the finite element method (FEM) to model the propagation of ultrasonic guided waves, although high computational resources are required [1]. To minimize the numerical effort we, therefore, propose a novel type of non-reflecting boundary condition in Sect. 8.2. With the help of this approach we can significantly reduce the size of the numerical model. Nonetheless, the main features of the micro- and macrostructure of the medium are still accurately represented.
In Sect. 8.3 we want to gain a deeper insight in the wave propagation in cellular structures. To this end, we run several parametric studies to determine important information, such as the energy transmission rate and the wavelength. These data are needed to choose the appropriate excitation signals for SHM applications as well as to assess possible damages which can be detected by propagating waves during the signal processing stage [20, 22].
In Chap. 9 the topic of wave propagation analysis in heterogeneous and cellular materials is taken up again. There a different approach based on the fictitious domain concept is proposed. To this end, we extend the finite cell method (FCM) to high-frequency dynamics by exploiting the advantages of the spectral element method (SEM). In the remainder of the present chapter we will, however, first discuss the improvement of wave propagation analysis in the context of commercial FE-software.
2 Non-reflecting Boundary Conditions
The interaction of guided waves with structural defects is a characteristic feature that we want to exploit in order to obtain information about the location, the size, and the type of damage. In this context, boundary reflections are rather detrimental when extracting the necessary data. Therefore, we use an infinite domain to be able to study the interaction with defects separated from boundary reflections. For complex structures this is, at least from a computational point of view, unfortunately prohibitive. That is why, we searched for ways to reduce the numerical effort without notably decreasing the accuracy of the approach. One such idea is to introduce non-reflecting boundary conditions. As discussed in the following our approach is based on dashpot elements [12], which has two distinct advantages: (1) a significant reduction in the model size and (2) a straightforward implementation in commercial software packages. Therefore, we provide an efficient tool to simulate the interaction of elastic guided waves with complicated structures made of carbon and glass fiber reinforced plastics (CFRP; GFRP) and honeycomb composites even with ordinary personal computers [10].
In the wide body of literature there are different approaches to implement non-reflecting boundary conditions [2, 6, 8, 17, 18, 26] each with its own advantages and deficiencies. Some of the proposed methods are either limited to specific geometries and materials [2, 17] or their performance is not sufficient [18]. The perfectly matched layer (PML) method is currently seen as the most powerful tool to absorb unwanted boundary reflections [21]. With this method we are able to accurately model wave propagation in unbounded domains [6]. On the other hand, this method can be computationally quite expensive and is not easy to implement [26]. Therefore, we favor a different approach. The idea is to introduce absorbing boundary conditions locally which offers a lot of flexibility at reasonable computational costs [26]. In this case we do not have to include complex functions and retain the ability to couple different numerical approaches such as FEM and finite difference, for example [10]. One additional issue that is very important regarding the development of the novel non-reflecting boundary conditions is the possibility to include them in established commercial software packages.
2.1 Basic Principles
The applied non-reflecting boundary conditions rely on the use of dashpot elements to reduce the computational effort. Such an approach was originally proposed by Lysmer and Kuhlemeyer [18] and successfully applied in the simulation of soil and concrete [4, 21, 27]. We adopt this approach and extend it to the computation of ultrasonic guided waves in heterogeneous (composite) structures. To this end, the damping factor ζ dash, the direction of the dashpot elements d dash, and the number of dashpot frames n dash have to be determined [12].
In the remainder of this section the model size is measured in terms of the number of frames. We use the definition that the number of element rows and columns in each frame is equal to the row numbers in the region of interest (RoI). Therefore, one frame may consist of several layers of finite elements depending on the choice of the RoI. The element size, however, is not influenced by this definition. In all simulations the element size is set to h sim = 1∕10 ×λ. This is a general recommendation for finite elements [19] which should only be used if quadratic basis functions are chosen [37]. The RoI shown in Fig. 8.2 has only one row. Therefore, each frame consists of one row and one column for this particular example. The sketched model is comprised of three frames (layers) in total. Note that in our studies the number of rows and columns is equal for each frame.

Non-reflecting boundary condition by means of dashpot elements. The dashpot elements are applied to three layers of elements around the region of interest (principally, the number of rows and columns can be chosen differently)
As mentioned before, we deploy dashpot elements to damp the wave reflections from the boundary of the structure. In an ideal case they would be designed such that no energy is reflected into the RoI. Since this is hardly possible using such a straightforward approach our goal is to reduce the amplitude of the reflected wave packets, such that these signals do not interfere with the chosen signal processing algorithm [12]. The basic idea is schematically shown in Fig. 8.2. The particular example is an aluminum plate with a thickness of 0. 5 mm. As illustrated only the nodes at the boundary are connected to the dashpot elements, and the direction of these elements coincides with the wave propagation direction x 1. The excitation signal is a 3.5-cycle sine-burst (cf. Eq. 6.37) with a center frequency of f ex = 150 kHz.
Dashpot elements exhibit a viscous behavior, that is to say the exerted force F damp is proportional to the velocity as
where ζ damp denotes the damping factor and \(\dot{U}_{i}^{E}\) and \(\dot{U}_{i}^{B}\) represent the velocities of the two vertices of the dashpot element. In our example one end is connected to the structure (\(\dot{U}_{i}^{E}\neq 0\)) and the other end is clamped (\(\dot{U}_{i}^{B} = 0\)). The defined damping force dissipates the wave energy and therefore the displacement amplitudes are decreased. For practical applications we still need to define the damping parameter, the direction of the dashpot elements and the number of dashpot element layers, cf. Fig. 8.2. The functionality of the proposed non-reflecting boundary condition is assessed by means of the wave energy in each global direction [27] by the following expression:
If the damping parameters are chosen, such that the dashpot elements work effectively the ratio η GW between the wave energy of the guided waves in the RoI and those reflected at the boundary of the structure has to be minimized [12]. Considering a value of η GW = 1 means that the reflected waves contain the same amount of energy as the waves in the region of interest. In the current studies, we assume that the boundary conditions work properly if η GW ≤ 0. 01. In this case we can easily distinguish between boundary reflections and propagating guided waves in the region of interest.
2.1.1 Damping Factor
From Eq. (8.1) we infer that the magnitude of the generated damping force is proportional to the damping factor ζ dash. The velocities of the dashpot vertices are given by the physical nature of the problem under investigation and cannot be influenced. In order to derive a quantity that is generally applicable and not only for certain classes of problems we introduce a modified damping parameter
with c g denoting the group velocity of the guided waves. In Fig. 8.3 we plot the energy ratio η GW over the modified damping parameter \(\tilde{\zeta }_{\mathrm{dash}}\). Due to the fact that the group velocity depends on the excitation frequency, the thickness of the plate, and the material properties of the structure the determined modified damping parameter is applicable in a wide range of wave propagation problems. For the current simulations a model size of four frames is deployed and only one frame of dashpot elements is applied. The results of the parametric study are presented in Fig. 8.3.

Energy ratio between the propagating waves in the RoI and the waves reflected at the boundary of the structure. The results are computed for an aluminum plate with a thickness of h = 2 mm. Material data: Young’s modulus: E = 70 GPa, Poisson’s ratio: ν = 0. 33, mass density: ρ = 2700 kg/m3. The guided waves are excited at f ex = 200 kHz with n ex = 3. 5 cycles by a sine-burst function (cf. Eq. (6.37))
This leads us to the following three conclusions:
-
1.
Small damping factors do not dissipate enough energy because the generated force is too small and therefore resulting in compliant dashpot elements.
-
2.
High damping factors do not dissipate enough energy because the generated force is too high and therefore resulting in rigid dashpot elements.
-
3.
A suitable range for the modified damping parameter is
$$\displaystyle{ \tilde{\zeta }_{\mathrm{dash}} = 2.8 \times 10^{4}\ldots 2.8 \times 10^{5}\,\mathrm{N}. }$$In this range the energy ratio is minimized and therefore the boundary reflections are negligible for typical engineering applications.
2.1.2 Direction of Dashpot Elements
Principally, it is possible to assign three degrees of freedom to each node of the dashpot elements corresponding to the three global coordinate directions. The question now arises whether this is always meaningful. In general, we observe that if the direction of the dashpot elements and therefore also the direction of the generated damping forces coincide with the wave propagation direction the effect of the non-reflecting boundary conditions is maximized [12]. We test the behavior of the performance of the dashpot elements at an aluminum plate of thickness h = 0. 5 mm. The excitation frequency is set to f ex150 kHz with n ex = 3. 5. According to the findings provided in Sect. 8.2.1.1 we choose a modified damping parameter of \(\tilde{\zeta }_{\mathrm{dash}} = 2.8 \times 10^{5}\,\mathrm{N}.\)
In the current example only the nodes on the outer boundary of the elements are connected to dashpot elements (one frame). The model size is identical to the previous study using four frames. In the initial computation the dashpot elements have only degrees of freedom in x 1-direction which is also the wave propagation direction, cf. Fig. 8.2. The computed energy ratio is \(\eta _{\mathrm{GW}_{x_{ 1}}} = 0.7\). If we now change the orientation of the dashpot elements to the x 2- and x 3-direction, respectively, we obtain \(\eta _{\mathrm{GW}_{x_{ 2}}} = 2.0\) and \(\eta _{\mathrm{GW}_{x_{ 3}}} = 2.6\) as energy ratios. This behavior is highlighted in Fig. 8.4, where the voltage signal at a measurement point is shown for dashpot element in x 1- and x 3-direction. An application of dashpot elements with three degrees of freedom per node has also been evaluated. Here, only a reduction of roughly 3% compared to the first case can be achieved (η GW = 0. 68).

Voltage signals for different dashpot orientations. The wave propagation is computed in an aluminum plate of thickness h = 0. 5 mm and the excitation signal is a sine-burst with a center frequency of f ex = 150 kHz and 3.5-cycles. The dashed blue line separates the region of the incident waves from that of the reflected waves
2.1.3 Number of Dashpot Element Layers
The last parameter that needs to be investigated is the number of dashpot elements which is closely related to the number of finite element layers within the damping domain [10]. In the current example we compute the wave propagation in an aluminum plate with a thickness of h = 2 mm and the excitation signal is a sine-burst with a center frequency of f ex = 200 kHz and 3.5-cycles. According to the findings provided in Sect. 8.2.1.1 we choose again a modified damping parameter of \(\tilde{\zeta }_{\mathrm{dash}} = 2.8 \times 10^{5}\,\mathrm{N}.\)
For the current simulations a model size of six frames is chosen and for the first simulation dashpot elements are only applied to the outer frame which corresponds to 617 dashpot elements. Depending on the accuracy requirements the number of frames is successively increased to six frames as depicted in Fig. 8.5. The dashpot elements have only one degree of freedom per node and are oriented in x 1-direction. Considering the explained setup the energy ratio is η GW = 0. 03. For the following simulation we increase the number of element layers to two and four, respectively. The approach is schematically illustrated in Fig. 8.5.

Sketch of a plate with six frames to account for the damping region around the region of interest (symmetry is taken into account)
The additional layers naturally decrease the energy ratio meaning that the non-reflecting boundary conditions become more effective. From the initial value corresponding to one layer of dashpot elements η GW = 0. 03 the ratio is further decreased to η GW = 0. 012 and η GW = 0. 011, respectively. These values correspond to the two and four frames of dashpot elements. Since the value for η GW is in any case well below 1 the initial configuration provides an acceptable accuracy. In Fig. 8.6 we compare the displacement history for the one (n dash = 617) and four layer (n dash = 2468) model. As predicted by the energy ratio we observe a good agreement of the results.

Voltage signals for different numbers of dashpot element layers. The wave propagation is computed in an aluminum plate of thickness h = 2 mm and the excitation signal is a sine-burst with a center frequency of f ex = 200 kHz and 3.5-cycles. The dashed blue line separates the region of the incident waves from that of the reflected waves
2.2 Numerical Example
In order to verify the performance and to highlight the advantages of the proposed non-reflecting boundary conditions we compare our approach to a different method that uses 20 finite element layers with gradually increasing damping parameters [31]. This so-called amplitude reduction layer technique is an established absorbing layer approach [10]. A weighting function which has a value of 1 at the beginning of the attenuation zone and zero at the boundaries of the structure is used to define amplitude attenuation. The material damping within each layer can be also inferred from that function. This method is very effective and often used in the finite difference framework [21]. In a finite element sense we can implement this approach by gradually increasing the damping parameters with increasing distance from the region of interest. In [17] a FE-based approach is used to analyze the propagation in an infinitely long plate. To avoid spurious reflections a non-reflecting boundary condition was applied by means of implementing a gradually increased stiffness-proportional material damping. The damping factors were increased from non-damped elements inside the structure to very high damping factors at the outer boundaries of the structure. This approach is now deployed to assess the quality of the proposed dashpot non-reflecting boundary condition.
The guided waves are excited in an aluminum plate with a thickness of h = 2 mm. The center frequency of the sine burst is f ex = 40 kHz and the signal contains 3.5 cycles. According to the findings provided in Sect. 8.2.1.1 we choose a modified damping parameter of \(\tilde{\zeta }_{\mathrm{dash}} = 2.8 \times 10^{5}\,\mathrm{N}.\) The gradually damped artificial boundary condition deploys 20 layers with increasing material damping (η GW = 0. 0027), while the dashpot approach uses only one frame of dashpot elements with a model size of four frames (η GW = 0. 17). The number of degrees of freedom is reduced by a factor of five using our method. The displacement history (at the top surface) for both approaches is depicted in Fig. 8.7. The time of flight of the wave packets is almost identical but the amplitude differs notably. Overall, a reasonable agreement is observed. The two major advantages of the DBC over the GIDP are its straightforward implementation in any commercial FEM code and its numerical efficiency with respect to the computational time.

Comparison of the voltage signals using dashpot boundary conditions (DBC) or layers with gradually increasing damping parameters (GIDP). The wave propagation is computed in an aluminum plate of thickness h = 2 mm and the excitation signal is a sine-burst with a center frequency of f ex = 40 kHz and 3.5-cycles. The dashed blue line separates the region of the incident waves from that of the reflected waves
An improvement of the performance of the dashpot boundary conditions results from a combination of both approaches discussed above. By doing so the model size is obviously increased but the amplitude of the reflected waves is further decreased [10]. More complex applications of the proposed non-reflecting boundary conditions are studied in [12].
3 Parametric Studies of Wave Propagation in Cellular Materials
The physical understanding of the phenomena related to the propagation of elastic guided waves in cellular structures is one important prerequisite when designing efficient and robust structural health monitoring (SHM) systems. In the following different parametric studies are executed to characterize the wave propagation behavior in such heterogeneous materials. In the focus of our investigations are sandwich panels with a metallic foam core and a honeycomb core layer. We study the influence of different geometrical parameters on the propagation of ultrasonic guided waves. To this end, only one parameter is varied for each parametric study. Those investigations provide a deeper understanding of the physical principles of wave propagation in cellular sandwich panels which is essential for the design of efficient SHM systems [33]. The simulation results are the foundation for choosing appropriate excitation signals for various SHM-related applications [20] as well as to determine suitable signal processing approaches [22]. The wave properties are evaluated by comparing the excited wave packet at the actuation point (located on the top surface) with sensing points on the top and bottom surfaces. Therefore, due to presence of the core layer the wave properties may differ with respect to the top and bottom surfaces. For more details about the evaluation of the wave properties we refer the interested reader to [10].
3.1 Sandwich Panel with a Foam Core
In the current section we investigate the propagation of ultrasonic guided waves in sandwich panels with a foam core layer. Of special importance is to assess the influence of the excitation frequency f ex, geometrical properties, such as the cover plate thickness t P, the relative density \(\tilde{\rho }\), and the cell morphology (open-, closed-cell foam) [13].
3.1.1 Numerical Model
To develop a numerical model for a sandwich panel with a foam core we deploy the concept of Voronoi tessellations [3]. This approach was proposed by Zhu et al. [40] and adopted by Hosseini et al. [13]. They randomly distribute a specified number of points n V inside a cubical domain of dimension h cube. Based on the definition of a minimum distance between individual points δ P
all vertices that do not fulfill Eq. (8.4) are discarded. Therefore, the number of discarded points n d has to be distributed again. This procedure is repeated until n V are successfully defined. These vertices act as nuclei for the generation of a Voronoi tessellation. The Voronoi cell V c i that is associated with the ith nucleus (vertex) is determined by the set of points that are closer to x i than to any other nucleus x j
In order to obtain a model that is bounded by the cubical domain and has periodical lateral boundaries we create eight copies of this domain including the randomly distributed vertices and translate them such that the initial box is bounded by its copies from all sides except for the bottom and top face. Additionally, we attach a regular bottom and top plate to the foam core before the Voronoi tessellation is performed. In the last step of the model generation procedure we have to incorporate the data from the Voronoi tessellation into a finite element program. To this end, we have to distinguish between open- and closed-cell foams. Considering the first case, we replace the face of each Voronoi cell by shell elements, while in the latter case each edge is replaced by a beam element. The generated finite element models for both types of foams are depicted in Fig. 8.8.

Numerical model of a sandwich plate with a foam core layer. (a) Open-cell foam, (b) Closed-cell foam
3.1.2 Influence of the Excitation Frequency
The propagation of elastic guided waves is analyzed in a frequency range from 40 to 400 kHz which is typical for many SHM-related applications. The relative density of the sandwich plate is set to \(\tilde{\rho }= 0.168\). These parameters are deployed for all parametric studies if not specified otherwise.
From the results we observe that the group velocity of the fundamental symmetric wave mode is hardly influenced by the excitation frequency. Therefore, we can conclude that the S 0-mode is not strongly dispersive in the investigated frequency range. On the other hand, the group velocity of the fundamental antisymmetric mode increases with the frequency. Furthermore, we notice that due to the increasing excitation frequency the wavelengths get shorter for both modes.
3.1.3 Influence of Geometrical Dimensions
(a) Thickness of the Cover Plate:
The thickness of the cover plates t P is one important aspect that can be easily adjusted in practical applications. From the results we can infer that both the group velocity and the wavelength of the S 0-mode are independent of t P when dealing with closed-cell foam cores. If we, however, investigate an open-cell foam both parameters increase slightly with increasing thickness of the cover plate. A similar behavior is observed for the A 0-mode for open- and closed-cell foam cores. Furthermore, we notice that the energy that is transmitted to the core layer is significantly increased if we deploy thicker cover plates.
(b) Relative Density:
A second parameter that can be varied straightforwardly is the relative density \(\tilde{\rho }\) of the sandwich panel. It is defined as
where ρ c and ρ s are the mass density of the cellular and the solid material, respectively. Due to the fact that the masses of the cellular and the solid material are identical—if there is no inclusion in the cellular microstructure (only voids)—the relative density can also be computed in terms of the volume
The volume of the cellular structure V c is the overall volume of the sandwich panel, while the volume of the solid structure is comprised of the volumes of the cell walls and their connections.
From the results of the simulations we can deduce that this value does not play a significant role. In this case, we notice a similar behavior for both open- and closed-cell foams. However, by increasing the relative density the energy transmission to the core layer is notably decreased.
More detailed investigations concerning the wave propagation in sandwich panels with a foam core layer can be found in [10, 13].
3.2 Sandwich Panel with a Honeycomb Core
In the current section we investigate the propagation of ultrasonic guided waves in sandwich panels with a honeycomb core layer. Of special importance is to assess the influence of the excitation frequency and geometrical properties, such as the cover plate thickness t P, the honeycomb wall thickness t W, or the cell size of a honeycomb s H [11].
3.2.1 Numerical Model
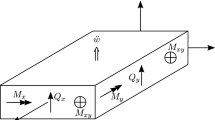
As the name suggests, the honeycomb sandwich panel consists of two cover plates and in between a honeycomb core layer. Figure 8.9 depicts the geometry of such a plate including its dimensions. In the following parametric studies we change the geometry of the honeycomb cells but the overall length and width of the sandwich panel as well as the height of the honeycomb cells are kept constant (l P = 290 mm, w P = 124 mm, h c = 15 mm).

Geometry of a sandwich plate with a honeycomb core layer
The cover plates are made of an aluminum alloy (T6061), while the honeycomb cells consist of para-aramid–phenolic laminate (HRH-36-1/8-3) manufactured by Hexel. The material properties are compiled in Table 8.1.
The finite element model of the cover plates consists of three-dimensional hexahedral elements, while the core structure is modelled deploying shell elements. The connection of the solid and shell elements is often very critical if stress distributions should be assessed in the vicinity. Since we are only interested in the displacements the formulation of multi-point constraint equations is an appropriate approach for the coupling of these different element types [29].
3.2.2 Influence of the Excitation Frequency
The excitation frequency f ex is varied between 40 and 400 kHz. The thickness of the cover plate is t P = 0. 5 mm, the thickness of the wall of the honeycomb cells is t W = 1. 48 mm, and the size of the honeycomb cells is s H = 4. 8 mm.
In the considered frequency range we are able to conclude that the group velocity of the fundamental symmetric wave mode is nearly independent of f ex when the guided waves propagate in the top surface (where the load is applied), while an increase of the group velocity is seen in the bottom plate. Considering the fundamental antisymmetric wave mode we notice that the group velocity is similar on the top and bottom plates. Accordingly, the wavelength changes significantly with the excitation frequency. The wavelength of both propagating modes decreases as f ex increases. Depending on the frequency range we see that either the S 0- or the A 0-mode is more effective. That is to say, the energy transmission of both wave modes is also a function of the excitation frequency.
3.2.3 Influence of Geometrical Dimensions
In the following investigations the excitation frequency is f ex = 100 kHz and the geometrical dimensions of the honeycomb cells are changed in a typical range of commercially available products.
(a) Thickness of the Cover Plate:
First, we assess the influence of the thickness of the cover plate t P. Therefore, t P is varied between 0.5 and 2 mm. The results of the simulations indicate that the influence of t P on the group velocity is almost negligible. A similar behavior is also observed for the wavelength of the guided waves. Regarding the energy transmission a minor influence is noticed with respect to the top surface of the sandwich panel. The energy transmission of the propagating S 0 mode to the bottom surface decreases as the thickness of the cover plate increases. Considering the A 0-mode hardly any influence is noticed.
(b) Thickness of the Honeycomb Walls:
In a second parametric study we vary the thickness of the honeycomb walls from 0.2 to 1. 75 mm. From the results we can infer that the group velocity is almost unchanged. The same observation is also made for the wavelength of the guided waves, which is only natural since the results are taken at both cover plates.
Furthermore, we notice that the energy transport is constant on the top surface, while it is significantly affected on the bottom plate. It is shown that as the honeycomb wall core increases, the energy transmission increases as well. This behavior is also illustrated in Fig. 8.10.

Contour plot of the out-of-plane displacement for different sandwich panels with a honeycomb core layers. The excitation frequency is f ex = 100 kHz and the honeycomb cell size is s H = 4. 8 mm. The snapshots have been saved at t = 4. 4 × 10−5 s. (a) t P = 0. 5 mm, t W = 0. 5 mm. (b) t P = 0.5 mm, t W = 1.48 mm. (c) t P = 2. 0 mm, t W = 0. 5 mm. (d) t P = 2.0 mm, t W = 1. 48 mm
(c) Size of a Honeycomb Cell:
In a third parametric study the size of a honeycomb cell is changed from 2.88 to 7. 2 mm. Regarding the S 0-mode it is found that when s H is increased the group velocity on the top surface is also increased. Considering the bottom surface such a behavior is not seen. The group velocity of the A 0-mode, however, increases for both the top and the bottom plate as the honeycomb cell size is increased. The curves for the wavelengths follow similar trends. Studying the energy transmission curves we notice that an increased honeycomb cell size has a negative effect.
More detailed investigations concerning the wave propagation in sandwich panels with a foam core layer are presented in [10, 11].
(d) Note on Particle-Reinforced Materials:
In the same spirit as presented in the current section Weber and Hosseini investigated the wave propagation in particle-reinforced materials [34, 35] and found that both the volume fraction (particle–matrix) and the stiffness of the particles have a significant influence on the propagation of elastic guided waves. Different particle arrangements including regular and irregular distributions were evaluated and hardly any influences on the group velocity or wavelength have been observed [10].
References
Ahmad ZAB (2011) Numerical simulation of Lamb waves in plates using a semi-analytical finite element method. VDI Fortschritt-Berichte Reihe 20 Nr. 437
Alpert B, Greengard L, Hagstrom T (2002) Nonreflecting boundary conditions for the time-dependent wave equation. J Comput Phys 180:270–296
Aurenhammer F, Klein R (1999) Voronoi diagrams. Technical Report, Technical University of Graz & FernUni Hagen
Balendra S (2005) Numerical modeling of dynamic soil-pile-structure interaction. Master’s Thesis, Washington State University, Department of Civil and Environmental Engineering
Barton R, Carter FWS, Roberts TA (1974) Use of reticulated metal foam as flash-back arrestor elements. Chem Eng J 291:708
Bérenger JP (1994) A perfectly matched layer for the absorption of electromagnetic waves. J Comput Phys 114:185–200
Bray H (1972) Design opportunities with metal foam. Eng Mater Des 16:16–19
Drozdz M, Moreau L, Castaings M, Lowe MJS, Cawley P (2006) Efficient numerical modelling of absorbing regions for boundaries of guided waves problems. In: AIP conference proceedings, vol 820, p 126
Fiedler T (2008) Numerical and experimental investigation of hollow sphere structures in sandwich panels. Trans Tech Publications, Zurich
Hosseini SMH (2013) Ultrasonic guided wave propagation in cellular sandwich panels for structural health monitoring. VDI Fortschritt-Berichte Reihe 20 Nr. 456
Hosseini SMH, Gabbert U (2013) Numerical simulation of the Lamb wave propagation in honeycomb sandwich panels: a parametric study. Compos Struct 97:189–201
Hosseini SMH, Duczek S, Gabbert U (2013) Non-reflecting boundary condition for Lamb wave propagation problems in honeycomb and CFRP plates using dashpot elements. Compos Part B 54:1–10
Hosseini SMH, Kharaghani A, Kirsch C, Gabbert U (2013) Numerical simulation of Lamb wave propagation in metallic foam sandwich structures: a parametric study. Compos Struct 97:387–400
Hosseini SMH, Duczek S, Gabbert U (2014) Damage localization in plates using mode conversion characteristics of ultrasonic guided waves. J Nondestruct Eval 33:152–165
Kohr T, Petersson BAT (2009) Wave beaming and wave propagation in lightweight plates with truss-like cores. J Sound Vib 321:137–165
Krez R, Hombergsmeier E, Eipper K (1999) Manufacturing and testing of aluminium foam structural parts for passenger cars demonstrated by example of a rear intermediate panel. In: Proceedings metal foams and porous structures
Liu GR, Jerry SQ (2003) A non-reflecting boundary for analyzing wave propagation using the finite element method. Finite Elem Anal Des 39:403–417
Lysmer J, Kuhlemeyer R (1969) Finite dynamic model for infinite media. J Eng Mech Div 95:859–877
Moser F, Laurence JJ, Qu J (1999) Modeling elastic wave propagation in waveguides with finite element method. NDT & E Int 32:225–234
Mustapha S, Ye L, Wang D, Lu Y (2011) Assessment of debonding in sandwich CF/EP composite beams using A 0 Lamb. Compos Struct 93:483–491
Oh T, Popovics JS, Ham S, Shin S (2012) Practical finite element based simulations of nondestructive evaluation methods for concrete. Comput Struct 98–99:55–65
Paget CA (2001) Active health monitoring of aerospace composite structures by embedded piezoceramic transducers. Ph.D. Thesis, Department of Aeronautics Royal Institute of Technology, Stockholm, Sweden
Qi X, Rose JL, Xu C (2008) Ultrasonic guided wave nondestructive testing for helicopter rotor blades. In: 17th world conference on nondestructive testing, Shanghai, China
Raghavan A, Cesnik C (2005) Lamb-wave based structural health monitoring. Damage prognosis: for aerospace, civil and mechanical systems. Wiley, New York, pp 235–258
Ruzzene M, Scarpa F, Soranna F (2003) Wave beaming effects in two-dimensional cellular structures. Smart Mater Struct 12:363–372
Sim I (2010) Nonreflecting boundary conditions for time-dependent wave propagation. Ph.D. Thesis, Faculty of Science, University of Basel, Switzerland
Song F, Huang G, Kim J, Haran S (2008) On the study of surface wave propagation in concrete structures using a piezoelectric actuator/sensor system. Smart Mater Struct 17:55024–55032
Song F, Huang GL, Hudson K (2009) Guided wave propagation in honeycomb sandwich structures using a piezoelectric actuator/sensor system. Smart Mater Struct 18:125007–125015
Suranat K (1980) Transition finite elements for three-dimensional stress analysis. Int J Numer Methods Eng 15:991–1020
Terrien N, Osmont D (2009) Damage detection in foam core sandwich structures using guided waves. In: Leger A, Deschamps M (ed) Ultrasonic wave propagation in non homogeneous media. Springer proceedings in physics, vol 128, Springer, Berlin, pp 251–260
Thompson L (2006) A review of finite element methods for time-harmonic acoustics. J Acoust Soc Am 119:1315–1330
Thwaites S, Clarck NH (1995) Non-destructive testing of honeycomb sandwich structures using elastic waves. J Sound Vib 187(2):253–269
Wang L, Yuan F (2007) Group velocity and characteristic wave curves of Lamb waves in composites: Modeling and experiments. Compos Sci Technol 67:1370–1384
Weber R (2011) Numerical simulation of the guided Lamb wave propagation in particle reinforced composites excited by piezoelectric patch actuators. Master’s Thesis, Institute of Numerical Mechanics, Department of Mechanical Engineering, Otto-von-Guericke-University Magdeburg, Germany
Weber R, Hosseini SMH, Gabbert U (2012) Numerical simulation of the guided Lamb wave propagation in particle reinforced composites. Compos Struct 94:3064–3071
Wierzbicki E, Woźniak C (2000) On the dynamic behavior of honeycomb based composite solids. Acta Mech 141:161–172
Willberg C, Duczek S, Vivar Perez JM, Schmicker D, Gabbert U (2012) Comparison of different higher order finite element schemes for the simulation of Lamb waves. Comput Methods Appl Mech Eng 241–244:246–261
Willberg C, Mook G, Gabbert U, Pohl J (2012) The phenomenon of continuous mode conversion of Lamb waves in CFRP plates. Key Eng Mater 518:364–374
Yoshimura H, Shinagawa K, Sukegawa Y, Murakami K (2005) Metallic hollow sphere structures bonded by adhesion. In: The 4th international conference on porous metals and metal foaming technology
Zhu HX, Hobdell JR, Windle AH (2000) Effects of cell irregularity on the elastic properties of open-cell foams. Acta Mater 48(20):4893–4900
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter
Cite this chapter
Duczek, S., Hosseini, S.M.H., Gabbert, U. (2018). Damping Boundary Conditions for a Reduced Solution Domain Size and Effective Numerical Analysis of Heterogeneous Waveguides. In: Lammering, R., Gabbert, U., Sinapius, M., Schuster, T., Wierach, P. (eds) Lamb-Wave Based Structural Health Monitoring in Polymer Composites. Research Topics in Aerospace. Springer, Cham. https://doi.org/10.1007/978-3-319-49715-0_8
Download citation
DOI: https://doi.org/10.1007/978-3-319-49715-0_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-49714-3
Online ISBN: 978-3-319-49715-0
eBook Packages: EngineeringEngineering (R0)