
Abstract
This paper presents a wearable rehabilitation exoskeleton for the elbow joint with two degrees of freedom (DOF), flexion-extension and pronation-supination, actuated with Shape Memory Alloy (SMA) based actuators. Due to the actuation system, the proposed exoskeleton presents a light weight, low noise, and is designed in a simple structure. The number of actuators and the preliminary designed was calculated based on a biomechanical simulation with a specific category of patients.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Shape Memory Alloy
- Elbow Joint
- Shape Memory Alloy Wire
- Shape Memory Alloy Actuator
- Rehabilitation Device
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The upper limbs play an important role in daily life and accidents such as stroke (cerebrovascular accident (CVA)) or spinal cord injury (SCI); significantly affect the normal rhythm of life, letting a partial or total trauma in the motor function. One part of these traumas can be recuperated through traditional rehabilitation therapy (performed by therapists) and, in the last decades, through the rehabilitation robotic devices. It has been demonstrated that the use of the robot-aide in the rehabilitation therapy has a good result even better than the manual therapy, in the patient motor function recuperation [1]. In the development of this type of devices, aspects such as the biomechanical structure of the patient must be considered. On the other hand the mechanical structure of the device must take into account issues such the pain, security, comfort, noise, weight, autonomy and the possibility of portability. These aspects have a strong connection with the system of actuation, forcing to search a solution with no conventional actuators. This paper presents a wearable rehabilitation exoskeleton for the elbow joint with 2DOF actuated with SMA for the right upper limb. The characteristics of the patient are: male with 70 kg of weight and 1.75 m of height. The first part of the paper presents an introduction to the actual problem, the second part presents the methodology, the third part present the control strategy and preliminary results and the last part presents a brief conclusions of this paper.
2 Methodology
This section presents the biomechanical simulation of the patient for which the device was proposed in order to extract data such necessary torque, the characteristics of the actuators and the main technical solution proposed for the exoskeleton.
2.1 Biomechanical Simulation
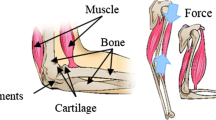
Nowadays, in the development of any robotic device the simulation tools play an important role due to their capacity to analyze the expected performance of the system designed prior to manufacture. To estimate the necessary torques in the articulations for a specific patient, a simulation software Biomechanics of Bodies (BoB) was used [2]. The software is capable to simulate the inverse dynamic behavior of the human body, receiving as input: the height, weight and motion of the patient, and giving as output, among other data, the torque of articulations. In this case the simulation was configured with the next parameters: weight 70 kg, height 1.7m, a trajectory in the right elbow joint between 0\(^{\circ }\) and 150\(^{\circ }\) with a frequency of movement 0.25 Hz. In addition, in the right hand, a force of 20 N was applied. As it can seen from the simulation, to complete the rehabilitation task in the elbow articulation successfully it is necessary a torque of approximately 3.5 Nm (Fig. 1). This case assumes that the patient has definitively lost the motor function and all the force is made by the exoskeleton.

In the left part the Biomechanics of Bodies simulator configured in the flexion-extension of the elbow joint. In the right part the results of simulation with the necessary torque in the elbow joint
2.2 SMA Based Actuator
The first result of the viability of the SMA actuator for soft wearable robots was presented in the past publication [3]. Considering 3.5 Nm as the necessary torque in the elbow exoskeleton joint and ranging the parameters such as: radio of pulley to pass from a translation motion to rotary motion, the diameter of the SMA wire and the SMA composition (NiTi and in composition with other alloys), a simulation capable to calculate the number of actuators and the length of this was done. In function of this results an optimal configuration for 120\(^{\circ }\) of angular motion was chosen: 4 actuators with a length of 1.5 m and a radio of pulley of 30 mm. The better alloy in this case is SmartFlex\(^{\textregistered }\), with the diameter of 500 \(\upmu \)m. Moreover, the SMA wires were introduced in a Bowden cable that in addition of the fixed structure (one of the extremity of the SMA is crimp in the extremity of Bowden) have an effect of heat dissipation.
2.3 Exoskeleton Design
In function of the biomechanical analysis and the chosen actuators, an exoskeleton design was proposed (Fig. 2). It is made of simple parts that give the possibility to easy assembly and set them in function of the patient. In addition we can build them with a 3D printer. The exoskeleton presents four attachment points with the human body, two of them with the arm, one with the forearm and the last one with the hand. The attachment points are adjustable in function of the patient. In the elbow joint articulation, the exoskeleton presents one DOF composed from a simple shaft with the bearing and a torsion spring which helps to recuperate the initial position of the actuators when the patient execute the rehabilitation task with the forearm horizontal with the ground and the gravity has no effect over the elbow joint. In the hand point attachment, the exoskeleton presents another DOF which gives the possibility of pronation-supination of the forearm. For the safety of the patient, the exoskeleton movement is mechanically limited between 0\(^{\circ }\) and 150\(^{\circ }\). For the comfort all intern part in contact with the patient was covered with a very soft hypoallergenic material. In the sensor integration part the structure incorporates in the elbow shaft one absolute encoder with a resolution of 0.0879\(^{\circ }\). Comparing with the current solution, the proposed rehabilitation device presents advantages such as reducing drastically the weight of exoskeleton—the whole structure with the actuators weights less than 1 kg—and the noise—due to the lack of gears and motors in the mechanism.

SMA actuated exoskeleton: 1 attachment points, 2 fixed structure for supination-pronation, 3 fixed structure for absolute encoder, 4 pulley for lineal to rotational motion, 5 Bowden termination

The reference patron angular position of the exoskeleton and the response of this actuated with 4 wires of SMA
3 Control Strategy and First Results
The main difficulty when controlling SMA based materials is the hysteresis, which appears in the phase of transition. It introduces in the system nonlinear behaviors which make difficult the control algorithms for this type of actuator. Moreover in this structure the problem becomes more complicated when we control the actuators mounted in parallel. In this work a four-term bilinear PID controller was used, which performance was presented in [4]. For a good calibration of the controller, a test-bench with one DOF capable to simulate the weight of the forearm was used.
In Fig. 3, it can be seen an angular position reference of the exoskeleton and its response mounted in the test bench, it is capable of following the reference pattern without any problems. The time to go from 0 to approximately 120\(^{\circ }\) (flexion) is less than 10 s (this can be minimized to 1 s changing the coefficients for the proportional, integral, derivative and bilinear terms) and to recuperate the initial position (extension), approximately 15 s, being ideal for slowly rehabilitation tasks.
4 Conclusions
This is the first wearable elbow exoskeleton actuated with SMA based actuators (without motors) which permit to reduce drastically the weight of the exoskeleton (less than 1 kg) and achieve a quiet operation characteristic which increase the comfort of the system. The exoskeleton was built as a low-cost rehabilitation device, which can be made with a 3D printer, with a low-cost electronics and actuators, which can be configured depending on the patient.
References
G. Kwakkel, B.J. Kollen, H.I. Krebs, Effects of robot-assisted therapy on upper limb recovery after stroke: a systematic review. Neurorehabil. Neural Repair 22, 111–121 (2008)
J. Shippen, B. May, Calculation of muscle loading and joint contact forces in Irish dance. J. Dance Med. Sci. (2010)
A. Villoslada, A. Flores, D. Copaci, D. Blanco, L. Moreno, High-displacement flexible Shape Memory Alloy actuator for soft wearable robots, in Robotics and Autonomous Systems,Special Issue on Wearable Robotics for Motion Assistance and Rehabilitation, Sept 2014
A. Villoslada, N. Escudero, A. Flores, F. Martin, C. Rivera, L. Moreno, M. Collado, Position control of a shape memory alloy actuator using a four-term bilinear PID controller. Sensors Actuators A Phys. 236 (2015)
Acknowledgments
The research leading to these results has received funding from the RoboHealth (DPI2013-47944-C4-3-R) Spanish research project.
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Copaci, D., Flores, A., Rueda, F., Alguacil, I., Blanco, D., Moreno, L. (2017). Wearable Elbow Exoskeleton Actuated with Shape Memory Alloy. In: Ibáñez, J., González-Vargas, J., Azorín, J., Akay, M., Pons, J. (eds) Converging Clinical and Engineering Research on Neurorehabilitation II. Biosystems & Biorobotics, vol 15. Springer, Cham. https://doi.org/10.1007/978-3-319-46669-9_79
Download citation
DOI: https://doi.org/10.1007/978-3-319-46669-9_79
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-46668-2
Online ISBN: 978-3-319-46669-9
eBook Packages: EngineeringEngineering (R0)